Metadata Report for BODC Series Reference Number 1964860
Metadata Summary
Problem Reports
Data Access Policy
Narrative Documents
Project Information
Data Activity or Cruise Information
Fixed Station Information
BODC Quality Flags
SeaDataNet Quality Flags
Metadata Summary
Data Description |
|||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
Data Identifiers |
|||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
Time Co-ordinates(UT) |
|||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
Spatial Co-ordinates | |||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
Parameters |
|||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
Problem Reports
No Problem Report Found in the Database
RRS James Cook JC156 Navigation Quality Control Report
Bathymetry
The EM122 multi-beam echosounder contains noise and drop outs. The EM122 multi-beam recordings follow the baseline bathymetry data provided by GEBCO when drop outs and noise are not present.
Data Access Policy
Open Data
These data have no specific confidentiality restrictions for users. However, users must acknowledge data sources as it is not ethical to publish data without proper attribution. Any publication or other output resulting from usage of the data should include an acknowledgment.
If the Information Provider does not provide a specific attribution statement, or if you are using Information from several Information Providers and multiple attributions are not practical in your product or application, you may consider using the following:
"Contains public sector information licensed under the Open Government Licence v1.0."
Narrative Documents
RRS James Cook cruise JC156 Underway Document
Cruise Details
| Cruise Details | 20th December 2017 - 01st February 2018 (UTC) |
| Principal Scientific Officer | Dr. Alessandro Tagliabue (University of Liverpool, Department of Earth, Ocean and Ecological Sciences) |
Kongsberg EM122 12kHz Multibeam Echosounder
The EM122 is designed to perform seabed mapping to full ocean depth with a high resolution, coverage and accuracy. Beam focusing is applied both during reception and transmission. The system has up to 288 beams/432 soundings per swath with pointing angles, which are automatically adjusted according to achievable coverage or operator defined limits.
This model uses both Continuous Wave and Frequency Modulated sweep pulses with pulse compression on reception, in order to increase the maximum useful swath width. The transmit fan is split in several individual sectors, with independent active steering, in order to compensate for the vessel movements.
In multiplying mode, two swaths per ping cycle are generated, with up to 864 soundings. The beam spacing is equidistant or equiangular and the transmit fan is duplicated and transmitted with a small difference in along track tilt, which takes into account depth coverage and vessel speed, to give a constant sounding separation along track. In high density mode, more than one sounding per beam can be produced, such that horizontal resolution is increased and is almost constant over the whole swath.
The EM122 transducers are modular linear arrays in a Mills cross configuration with separate units for transmit and receive. If used to deliver sub-bottom profiling capabilities with a very narrow beamwidth, this system is known as SBP120 Sub-Bottom Profiler.
The specification sheet can be accessed here Kongsberg EM122.
Specifications
| Operational frequency | 12 Hz |
| Depth range | 20 to 11000 m |
| Swath width | 6 x depth, to approximately 30 km |
| Pulse forms | Continuous Wave and Frequency Modulated chirp |
| Swath profiles per ping | 1 or 2 |
| Sounding pattern | equidistant on bottom/equiangular |
| Depth resolution of soundings | 1 cm |
| Sidelobe suppression | -25 dB |
| Suppression of sounding artefacts | 9 frequency coded transmit sectors |
| Beam focusing | On transmit (per sector) and on reception (dynamic) |
| Swath width control | manual or automatic, all soundings intact even with reduced swath width |
| Motion compensation | |
| Yaw | ± 10° |
| Pitch | ± 10° |
| Roll | ± 15° |
EM122 versions
| System version | 0.5x1 | 1x1 | 1x2 | 2x2 | 2x4 | 4x4 |
| Transmit array (°) | 150x0.5 | 150x1 | 150x1 | 150x2 | 150x2 | 150x4 |
| Receive array (°) | 1x30 | 1x30 | 2x30 | 2x30 | 4x30 | 4x30 |
| No of beams/swath | 288 | 288 | 288 | 288 | 144 | 144 |
| Max no of soundings/swath | 432 | 432 | 432 | 432 | 216 | 216 |
| Max no of swaths/ping | 2 | 2 | 2 | 1 | 1 | 1 |
| Max no of soundings/ping | 864 | 864 | 864 | 432 | 216 | 216 |
RRS James Cook JC156 Navigation Instrumentation
Instrumentation
| Manufacturer | Model | Function | Comments |
| Trimble/Applanix GPS | POSMV | DGPS, Attitude & Ship Gyrocompasses | The Position and Orientation Systems for Marine Vessels (POSMV) is a real time kinematic (RTK) and differential global positioning system (DGPS) receiver for marine navigation. It includes an inertial system that provides platform attitude information. |
| C- Nav | 3050 | DGPS and DGNSS | C&C Technologies C-Nav3050 satellite positioning system receiver |
| Kongsberg Seatex Seapath | Seapath 330 | DGPS | Sensor-based inertial navigation and Differential Global Positioning System (DGPS) receiver unit, providing heading, attitude and position. |
| Kongsberg Seatex DPS | DPS 116 | DPS | A 14-channel, all-in-view, L1 GPS receiver which primarily utilises the free, WAAS, EGNOS and MSAS Satellite Based Augmentation Systems (SBAS) for differential corrections (DGPS). |
| Sperry Marine Gyro | -Not Specified- | Gyrocompass | |
| Kongsberg Maritime | EA640 | Single Beam Echo Sounder | It comprises a standard EA600 single beam echosounder fitted with an additional 10 kHz transducer. The standard EA600 operates up to four high power transceivers simultaneously. Available EA600 standard frequencies span from 12 to 710 kHz with a variable power output of up to 2 kW and a 160 dB dynamic range. |
| Kongsberg Maritime | EM122 | Multibeam Echo Sounder | A multibeam 12 kHz echsounder designed for high resolution seabed mapping. It uses both Continuous Wave (CW) and Frequency Modulated (FM) sweep pulses with pulse compression on reception in order to increase the maximum used swath width. |
| Sonardyne | Ranger 2 USBL | Ultra Short BaseLine acoustic positioning system | An acoustic positioning system for deep water, long range tracking of underwater targets and position referencing for dynamically positioned (DP) vessels. |
Trimble Applanix Position and Orientation Systems for Marine Vessels (POSMV)
The Position and Orientation Systems for Marine Vessels (POSMV) is a real time kinematic (RTK) and differential global positioning system (DGPS) receiver for marine navigation. It includes an inertial system that provides platform attitude information. The instrument provides accurate location, heading, velocity, attitude, heave, acceleration and angular rate measurements.
There are three models of Applanix POSMV, the POS MV 320, POS MV Elite and the POS MV WaveMaster. POS MV 320 and POS MV WaveMaster are designed for use with multibeam sonar systems, enabling adherence to IHO (International Hydrographic Survey) standards on sonar swath widths of greater than ± 75 degrees under all dynamic conditions. The POS MV Elite offers true heading accuracy without the need for dual GPS installation and has the highest degree of accuracy in motion measurement for marine applications.
Specifications
POS MV 320
| Componenet | DGPS | RTK | GPS Outage |
|---|---|---|---|
| Position | 0.5 - 2 m 1 | 0.02 - 0.10 m 1 | <2.5 m for 30 seconds outages, <6 m for 60 seconds outages |
| Roll and Pitch | 0.020° | 0.010° | 0.020° |
| True Heading | 0.020° with 2 m baseline 0.010° with 4 m baseline | - | Drift <1° per hour (negligible for outages <60 seconds) |
| Heave | 5 cm or 5% 2 | 5 cm or 5% 2 | 5 cm or 5% 2 |
POS MV WaveMaster
| Accuracy | DGPS | RTK | GPS Outage |
|---|---|---|---|
| Position | 0.5 - 2 m 1 | 0.02 - 0.10 m 1 | <3 m for 30 seconds outages, <10 m for 60 seconds outages |
| Roll and Pitch | 0.030° | 0.020° | 0.040° |
| True Heading | 0.030° with 2 m baseline | - | Drift <2° per hour |
| Heave | 5 cm or 5% 2 | 5 cm or 5% 2 | 5 cm or 5% 2 |
POS MV Elite
| Accuracy | DGPS | RTK | GPS Outage |
|---|---|---|---|
| Position | 0.5 - 2 m 1 | 0.02 - 0.10 m 1 | <1.5 m for 60 seconds outages DGPS, <0.5 m for 60 seconds outage RTK |
| Roll and Pitch | 0.005° | 0.005° | 0.005° |
| True Heading | 0.025° | 0.025° | Drift <0.1° per hour (negligible for outages <60 seconds) |
| Heave | 3.5 cm or 3.5% 2 | 3.5 cm or 3.5% 2 | 3.5 cm or 3.5% 2 |
1 One Sigma, depending on quality of differential corrections
2 Whichever is greater, for periods of 20 seconds or less
Further details can be found in the manufacturer's specification sheet.
RRS James Cook JC156 Navigation Data Processing Procedures
Originator's Data Processing
The data were logged by the TECHSAS (TECHnical and Scientific sensors Acquisition System) system into daily NetCDF files. The TECHSAS system is used as the main data logging system on NMF-SS operated reserach vessels. The daily TECHSAS NetCDF navigation and bathymetry files provided to BODC were used for BODC processing. Data were additionally logged into the RVS Level-C format files which have been archived at BODC.
Files delivered to BODC
| Filename | Content description | Format | Interval | Start date/time (UTC) | End date/time (UTC) | Comments |
| yyyymmdd-000000-position-POSMV_GPS.gps | Position of the ship lat & Lon (Applanix PosMV V5) | NetCDF | 1 sec. | 20-Dec-2017 12:45:00 | 01-Feb-2018 14:30:00 | |
| yyyymmdd-000000-gyro-POSMV_GYRO.gyr | Heading of the ship (PosMV V5) | NetCDF | 1 sec. | 20-Dec-2017 12:45:00 | 01-Feb-2018 14:30:00 | |
| yyyymmdd-000000-sb_depth-EM122_DEPTH.depth | Depth of seafloor (EM122) | NetCDF | Variable 7sec-25 sec | 22-Dec-2017 08:17:56 | 30-Jan-2018 23:20:40 | First three and last two NETCDF Files do not contain any data. |
| yyyymmdd-000000-EA600-EA640_DEPTH.EA600 | Depth of Seafloor (EA600) | NetCDF | 22 sec. | 22-Dec-2017 08:04:17 | 01-Feb-2018 14:30:00 | First three NETCDF Files do not contain any data. |
BODC Data Processing
Data were banked at BODC following standard banking procedures. Data were averaged to 60 second intervals.
The originator's variables were mapped to appropriate BODC parameter codes as follows:
yyyymmdd-000000-position-POSMV_GPS.gps
| Originator's variable | Originator's units | Description | BODC Code | BODC Units | Unit conversion | Comments |
| lat | decimal degrees | Latitude north | ALATGP01 | decimal degrees | none | |
| lon | decimal degrees | Longitude east | ALONGP01 | decimal degrees | none | |
| time | days since 1899-12-30 00:00:00 UTC | Acquisition time | Not transferred | |||
| Mode | N/A | Mode | Not transferred | |||
| Heading | degrees | True heading | Not transferred. | |||
| prec | dimensionless | Precision | Not transferred | |||
| alt | meters | Altitude | Not transferred. | |||
| ndcourse | Degrees | Ground course | Not transferred. | |||
| gndspeed | knot | Ground speed | Not transferred. | |||
| measureTS | day since 1899-12-30T00:00:00 UTC | Measure timestamp | Not transferred |
yyyymmdd-000000-gyro-POSMV_GYRO.gyr
| Originator's variable | Originator's units | Description | BODC Code | BODC Units | Unit conversion | Comments |
| heading | Degrees true | True heading | HEADCM01 | degrees | none | |
| time | days since 1899-12-30 00:00:00 UTC | acquisition time | Not transferred. |
yyyymmdd-000000-sb_depth-EM122_DEPTH.depth
| Originator's variable | Originator's units | Description | BODC Code | BODC Units | Unit conversion | Comments |
| snd | meters | Sounding | MBANSWCB | meters | none | Multibeam |
| freq | kHz | Frequency | Not transferred | |||
| time | days since 1899-12-30 00:00:00 UTC | acquisition time | Not transferred |
yyyymmdd-000000-EA600-EA640_DEPTH.EA600
| Originator's variable | Originator's units | Description | BODC Code | BODC Units | Unit conversion | Comments |
| depthm | meters | Depth in meters | MBANZZ01 | meters | none | Single beam |
| DepthF | fathom | Depth in fathoms | Not transferred | |||
| depthft | feet | Depth in feet | Not transferred | |||
| time | days since 1899-12-30 00:00:00 UTC | acquisition time | Not transferred |
All the reformatted data were visualised using the in-house EDSERPLO software. Suspect data were marked by adding an appropriate quality control flag.
Position
A check was run on positional data to identify gaps and improbable values (through the calculation of speed). There was one gap in the positional data at the start and end of the file, produced during loading to the BODC system. These gaps were trimmed after processing was complete.
Ship Velocities
Ship velocities were calculated from the main latitude and longitude channels using standard BODC procedures.
GEBCO
GEBCO bathymetry was added to the file using the main latitude and longitude channels.
Distance Run
Distance run was calculated from the main latitude and longitude channels, starting from the beginning of the file, using BODC standard procedures.
Bathymetry
Bathymetry data were screened independently as well as against GEBCO bathymetry measurements. Both the EM122 multi-beam echosounder and the EA600 single beam echosounder contain a significant amount of noise. The EA600 single beams data is particularly unreliable as it regularly provides readings that are unrealistic and inconsistent with the EM122 multi-beam recordings. In addition, the EA600 single beam does not follow the baseline bathymetry data provided by GEBCO.
Calibration
No field calibrations have been applied.
Project Information
FRidge: The impact of Mid-Ocean Ridges on the Ocean's Iron cycle
FRidge is a research project funded by the UK Natural Environment Research Council (NERC). It aims to explore hypotheses regarding the mechanisms that shape ocean iron distribution and in particular, the role of hydrothermal inputs from distinct vent sites along the Mid-Atlantic Ridge.
The project is part of the UK contribution to the international GEOTRACES programme. Research will take place along the GEOTRACES International Section GA13.
Introduction
Photosynthesis by marine phytoplankton contributes to the partitioning of carbon dioxide between the atmosphere and the ocean. Iron is essential for phytoplankton growth as it is required for a number of important enzymes that participate in both photosynthesis and respiration. Mid-ocean ridges are significant sources of iron to the ocean due to hydrothermal activity, with dramatic iron plumes that persist for thousands of kilometres away from the ridge.
The impact of hydrothermal iron on the ocean carbon cycle depends both on the longevity of the iron plumes and the mixing of iron into surface waters, with both aspects poorly constrained. Thus our understanding of how the ocean iron cycle functions is incomplete. This is important as the influence of ocean biology on ocean-atmosphere carbon dioxide exchanges via the biological pump is controlled by iron availability over large parts of the ocean.
Scientific Objectives
The main objectives of the project are to:
1. Document the changes in iron supply, cycling and speciation along the diverse hydrothermal systems of the northern Mid-Atlantic Ridge.
2. Link observational science with state of the art ocean modelling to assess the global influence of mid-ocean ridges on the ocean iron cycle and the sustenance of surface productivity.
To deliver on these objectives, a research expedition to the Atlantic Ocean was carried out to measure trace metals, nutrients and ocean physics over and around the Mid-Atlantic Ridge. Ultimately this will be able to address the broader question of how the amount of iron from mid-ocean ridges can influence phytoplankton growth in the open ocean.
Fieldwork
The FRidge cruise was completed aboard RRS James Cook cruise JC156, which ran between Southampton and Guadeloupe from the 20th of December 2017 to the 1st of February 2018. See the table below for details on what was sampled:
| Data Type | Description | Units |
| Trace elements | Dissolved trace metals (from Ti-Rosette) | nmol/L |
| Trace elements | Particulate trace metals (from Ti rosette) | µmol/L |
| Trace elements | Particulate trace metals (from SAPS) | µmol/L |
| Other chemical oceanographic elements | Helium | fmol/L |
| Phosphate | Phosphate (from SSR and Ti-Rosette) | µmol/L |
| Silicate | Silicate (from SSR and Ti-Rosette) | µmol/L |
| Nitrate | Nitrate (from SSR and Ti-Rosette) | µmol/L |
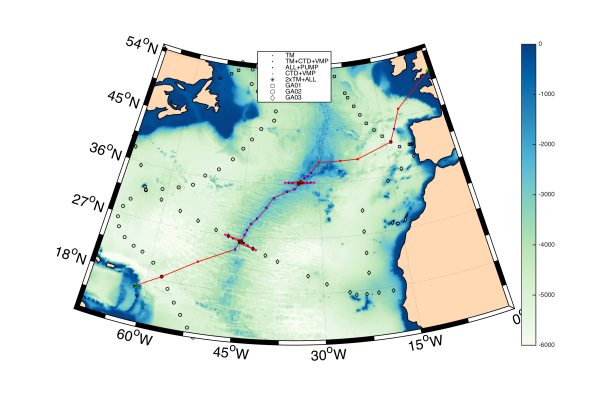
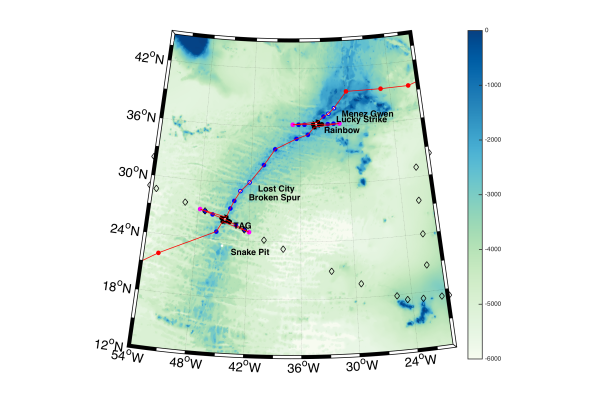
The above images show the locations of known hydrothermal vent systems and the dots represent locations where sampling took place.
Project Collaborators
The science delivered as part of this GEOTRACES section is greatly enhanced by the collaboration with a number of scientists from the following institutions:
- University of Southampton
- University of Liverpool
- Plymouth Marine Laboratory
- Oxford University
- University of South Florida
- University of Washington
- University of California Santa Barbara
- Woods Hole Oceanographic Institute
Scientific Personnel
- Alessandro Tagliabue (Cruise Chief Scientist, University of Liverpool, UK)
- Maeve Lohan (University of Southampton, UK)
- Andy Heath (University of Liverpool, UK)
- Alastair Lough (University of Southampton, UK)
- Shaun Rigby (University of Liverpool, UK)
Project Partners
- Alex Baker (University of East Anglia)
- William Jenkins (Woods Hole Oceanographic Institute)
- Brandy Toner (University of Minnesota)
Funding
This is a NERC funded research project. Funding was provided in the form of two fellowship and training grants.Total value of £527,588. The lead/parent grant reference number is NE/N010396/1 led by Maeve Lohan and the child grant NE/N009525/1 is led by Alessandro Tagliabue.
Period of Award: 4 Sep 2017 - 3 Mar 2020
Data Activity or Cruise Information
Cruise
| Cruise Name | JC156 (FRidGE, GA13) |
| Departure Date | 2017-12-20 |
| Arrival Date | 2018-02-01 |
| Principal Scientist(s) | Alessandro Tagliabue (National Oceanography Centre, Southampton) |
| Ship | RRS James Cook |
Complete Cruise Metadata Report is available here
Fixed Station Information
No Fixed Station Information held for the Series
BODC Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| Blank | Unqualified |
| < | Below detection limit |
| > | In excess of quoted value |
| A | Taxonomic flag for affinis (aff.) |
| B | Beginning of CTD Down/Up Cast |
| C | Taxonomic flag for confer (cf.) |
| D | Thermometric depth |
| E | End of CTD Down/Up Cast |
| G | Non-taxonomic biological characteristic uncertainty |
| H | Extrapolated value |
| I | Taxonomic flag for single species (sp.) |
| K | Improbable value - unknown quality control source |
| L | Improbable value - originator's quality control |
| M | Improbable value - BODC quality control |
| N | Null value |
| O | Improbable value - user quality control |
| P | Trace/calm |
| Q | Indeterminate |
| R | Replacement value |
| S | Estimated value |
| T | Interpolated value |
| U | Uncalibrated |
| W | Control value |
| X | Excessive difference |
SeaDataNet Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| 0 | no quality control |
| 1 | good value |
| 2 | probably good value |
| 3 | probably bad value |
| 4 | bad value |
| 5 | changed value |
| 6 | value below detection |
| 7 | value in excess |
| 8 | interpolated value |
| 9 | missing value |
| A | value phenomenon uncertain |
| B | nominal value |
| Q | value below limit of quantification |
