Metadata Report for BODC Series Reference Number 2012137
Metadata Summary
Problem Reports
Data Access Policy
Narrative Documents
Project Information
Data Activity or Cruise Information
Fixed Station Information
BODC Quality Flags
SeaDataNet Quality Flags
Metadata Summary
Data Description |
|||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
Data Identifiers |
|||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
Time Co-ordinates(UT) |
|||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
Spatial Co-ordinates | |||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
Parameters |
|||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||
Problem Reports
No Problem Report Found in the Database
JR16005 Underway Navigation Quality Control Report
Position
Position channels look good. Two gaps just at the start and end of the dataset, which can be trimmed off at the end of processing. flags were automatically applied to this.
Heading
Heading channel looks good. There are some large fluctuations within the permitted maximum and minimum parameter values and there are some parts of the datasets where absent values have been recorded. These absent values were automatically flagged.
Bathymetry
All bathymetry channels show a similar pattern. The quality of both the single-beam and the multi-beam channel are moderate as there are numerous dropouts and noisy periods. Despite this, both channels follow GEBCOâ??s trend very well once quality control flags had been applied.
The overall quality of the multi-beam is slightly better than the single beam and the multi-beam was also the preferred bathymetry channel selected by the originator. Thus, the multi-beam is the preferred source of bathymetry.
Data Access Policy
Open Data
These data have no specific confidentiality restrictions for users. However, users must acknowledge data sources as it is not ethical to publish data without proper attribution. Any publication or other output resulting from usage of the data should include an acknowledgment.
If the Information Provider does not provide a specific attribution statement, or if you are using Information from several Information Providers and multiple attributions are not practical in your product or application, you may consider using the following:
"Contains public sector information licensed under the Open Government Licence v1.0."
Narrative Documents
RRS James Clark Ross cruise JR16005 underway document
Cruise details
| Dates | 17th March 2017 - 8th May 2017 (UTC) |
|---|---|
| Principal Scientific Officer | Prof. Alberto Naveira Garabato (British Antarctic Survey) |
Kongsberg EM122 12kHz Multibeam Echosounder
The EM122 is designed to perform seabed mapping to full ocean depth with a high resolution, coverage and accuracy. Beam focusing is applied both during reception and transmission. The system has up to 288 beams/432 soundings per swath with pointing angles, which are automatically adjusted according to achievable coverage or operator defined limits.
This model uses both Continuous Wave and Frequency Modulated sweep pulses with pulse compression on reception, in order to increase the maximum useful swath width. The transmit fan is split in several individual sectors, with independent active steering, in order to compensate for the vessel movements.
In multiplying mode, two swaths per ping cycle are generated, with up to 864 soundings. The beam spacing is equidistant or equiangular and the transmit fan is duplicated and transmitted with a small difference in along track tilt, which takes into account depth coverage and vessel speed, to give a constant sounding separation along track. In high density mode, more than one sounding per beam can be produced, such that horizontal resolution is increased and is almost constant over the whole swath.
The EM122 transducers are modular linear arrays in a Mills cross configuration with separate units for transmit and receive. If used to deliver sub-bottom profiling capabilities with a very narrow beamwidth, this system is known as SBP120 Sub-Bottom Profiler.
The specification sheet can be accessed here Kongsberg EM122.
Specifications
| Operational frequency | 12 Hz |
| Depth range | 20 to 11000 m |
| Swath width | 6 x depth, to approximately 30 km |
| Pulse forms | Continuous Wave and Frequency Modulated chirp |
| Swath profiles per ping | 1 or 2 |
| Sounding pattern | equidistant on bottom/equiangular |
| Depth resolution of soundings | 1 cm |
| Sidelobe suppression | -25 dB |
| Suppression of sounding artefacts | 9 frequency coded transmit sectors |
| Beam focusing | On transmit (per sector) and on reception (dynamic) |
| Swath width control | manual or automatic, all soundings intact even with reduced swath width |
| Motion compensation | |
| Yaw | ± 10° |
| Pitch | ± 10° |
| Roll | ± 15° |
EM122 versions
| System version | 0.5x1 | 1x1 | 1x2 | 2x2 | 2x4 | 4x4 |
| Transmit array (°) | 150x0.5 | 150x1 | 150x1 | 150x2 | 150x2 | 150x4 |
| Receive array (°) | 1x30 | 1x30 | 2x30 | 2x30 | 4x30 | 4x30 |
| No of beams/swath | 288 | 288 | 288 | 288 | 144 | 144 |
| Max no of soundings/swath | 432 | 432 | 432 | 432 | 216 | 216 |
| Max no of swaths/ping | 2 | 2 | 2 | 1 | 1 | 1 |
| Max no of soundings/ping | 864 | 864 | 864 | 432 | 216 | 216 |
JR16005 Underway Navigation Instrumentation
The following scientific navigational and bathymetric systems were fitted.
| Manufacturer | Model | Function | Comments |
| Seatex | Seapath 320+ | GPS (latitude, longitude and ships heading) | Primary source of position for science. |
| Kongsberg Maritime | Simrad EA600 | Single-beam echo sounder (hull) | EA600 was run in passive mode while the EM122 was running during the cruise. |
| Kongsberg Maritime | Simrad EM122 | Multi-beam echo sounder (deep) | Best quality bathymetry source. |
Kongsberg Seatex Seapath 320+ Precise Heading, Attitude and Positioning Sensor
The Seapath 320+ is a navigational system that combines two Global Navigation Satellite System (GNSS) receivers with a MRU 5+ inertial sensor to provide high resolution and accuracy positional data. The inertial sensor employs linear accelerometers and unique microelectromechanical systems (MEMS)-type angular rate gyros to provide 0.01 RMS pitch and roll accuracy. The GNSS receivers can use multiple satellite constellations (GPS, GLONASS and Galileo, when available), and combine data from these to improve heading and positional measurements. In case of missing data from one GNSS receiver, the other receiver provides position and velocity, and the inertial sensor provides heading from its internal rate sensors.
The main characteristics are presented below, and the specification sheet can be accessed here Kongsberg Seatex Seapath 320+ .
Specifications
| Heading accuracy | 0.04° RMS (4m baseline) 0.065° RMS (2.5 baseline) |
| Roll and pitch accuracy | 0.02° RMS for ± 5° amplitude |
| Scale factor error in roll, pitch and heading | 0.05% RMS |
| Heave accuracy (real time) | 5 cm or 5%, whichever is highest |
| Heave accuracy (delayed signal) | 2 cm or 2%, whichever is highest |
| Heave motion periods (real time) | 1 to 20 seconds |
| Heave motion periods (delayed signal) | 1 to 50 seconds |
| Position accuracy (DGPS/DGlonass) | 1 m (95% CEP) |
| Position accuracy (SBAS) | 1 m (95% CEP) |
| Position accuracy (with RTK corrections) | 0.2 m (95% CEP) |
| Velocity accuracy | 0.07 m s-1 (95% CEP) |
| Data update rate | Up to 100Hz |
JR16005 Underway Navigation and Bathymetry Processing Procedures Document
Originator's Data Processing
The navigation and bathymetric data were measured by several different instruments and the data were logged every second to the SCS system and stored in comma separated ACO format. Each instrument logged data to one individual file and the associated header information is stored in TPL files.
The originator compiled the .ACO files into a MATLAB structure array for further processing. The originator's .MAT file includes navigation and bathymetry data. The .MAT file was provided to BODC and used for BODC processing.
The table below shows the original files delivered to BODC that contained the data in the final data series, along with start and end dates and times of each file.
| Filename | Content Description | Format | Interval | Start date | Start Time | End date | End Time |
| underway_data.mat | Latitude and Longitude | .MAT | 30 sec | 18-03-2017 | 00:00:00 | 29-04-2017 | 23:59:30 |
| underway_data.mat | Ships Heading | .MAT | 30 sec | 18-03-2017 | 00:00:00 | 29-04-2017 | 23:59:30 |
| underway_data.mat | Multi-beam echo-sounder | ASCII (.ACO) | ~13-15 sec | 18-03-2017 | 00:00:02 | 29-04-2017 | 23:59:53 |
BODC Data Processing
The data were reformatted to BODC internal format using standard banking procedures. Data were averaged at 60 second intervals. The following table shows how variables within the file were mapped to appropriate BODC parameter codes:
| Originator's File | Originator's Parameter | Originator's Units | Description | BODC parameter | BODC Units | Comments and unit conversions |
|---|---|---|---|---|---|---|
| underway_data.mat | lat | Degrees (+ve N) | Latitude north (WGS84) by Seatex Seapath DGPS | ALATGP01 | Degrees (+ve N) | - |
| underway_data.mat | lon | Degrees (+ve E) | Longitude east (WGS84) by Seatex Seapath DGPS | ALONGP01 | Degrees (+ve E) | - |
| underway_data.mat | heading | degrees | Ship heading | HEADCM01 | degrees | - |
| ea600.ACO | depth | m | Sea floor depth | MBANZZ01 | meters | Omitted from originator's .MAT file. Added from .ACO file for screening purposes. |
| underway_data.mat | depth | m | Sea floor depth | MBANSWCB | meters | Best quality bathymetry channel |
All the reformatted data were visualised using the in-house EDSERPLO software. Suspect data were marked by adding an appropriate quality control flag.
Position
A check was run on positional data to identify gaps and improbable values (through the calculation of speed). Numerous gaps and speed fails were found. These were corrected by running a script that uses linear interpolation to fill in the gaps.
Ship velocities
Ship velocities were calculated from the main latitude and longitude channels using standard BODC procedures.
Distance Run
Distance run was calculated from the main latitude and longitude channels, starting from the beginning of the file, using BODC standard procedures.
GEBCO
GEBCO bathymetry was added to the file using the main latitude and longitude channels.
Bathymetry
Bathymetry data were screened independently as well as against GEBCO bathymetry measurements. The mulit-beam echo sounder was deemed to be the best quality source of bathymetry and was retained in the file.
Calibration
No sample calibrations were applied to these data.
Project Information
Dynamics of Orkney Passage Outflow (DynOPO)
DynOPO is a five year research project that aims to understand how Antarctic Bottom Water is exported and modified through the Orkney Passage, the overflow's controlling dynamics, and its downstream impact on the Atlantic Ocean abyss.
Introduction
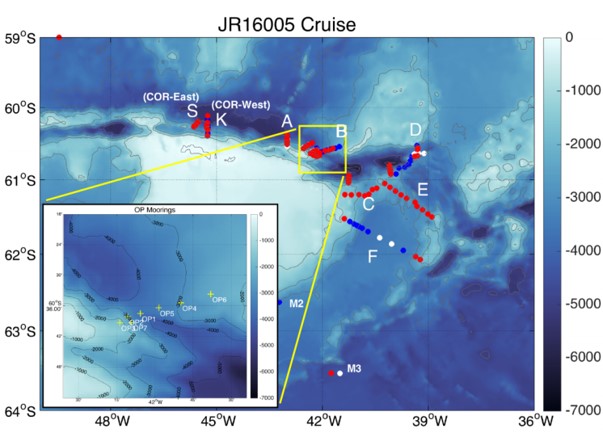
Mooring data collected for the DynOPO project are a component of a long term time series, in association with the Ocean Regulation of Climate by Heat and Carbon Sequestration and Transports (ORCHESTRA) project, led by Emily Shuckburgh (British Antarctic Survey) since 2016. The time series originally started out as part of the British Antarctic Survey's Long-Term Monitoring and Survey (LTMS) programme. Moorings were deployed on RRS James Clark Ross cruise JR20150309 (JR310 and JR272D) which ran from 09 March to 14 April 2015. RRS James Clark Ross cruise JR16005 ran from 17 March to 08 May 2017 and was the primary fieldwork element of the DynOPO project. The cruise had two main goals: (1) to conduct measurements of the hydrographic properties, velocity and turbulent processes of the Antarctic Bottom Water outflow along its pathway through the Orkney Passage region; and (2) to turn around a set of long-term moorings deployed in the area by British Antarctic Survey (BAS) and Lamont-Doherty Earth Observatory (LDEO) scientists, including recovery of additional instruments on some of the moorings deployed by JR20150309.
Project Collaborators
The project was led by the University of Southampton, and is an international collaboration with;
- UK: British Antarctic Survey (BAS), UK Meteorological Office, University of East Anglia and Newcastle University;
- Europe: University of Gothenburg (Sweden), University of Paris 6 (France);
- Australia: University of Tasmania;
- US: Lamont Doherty Earth Observatory, Woods Hole Oceanographic Institute, NOAA, University of California, Washington State University and Princeton University
Funding
The project was funded by the Natural Environment Research Council and ran from March 2015 to November 2018.
Data Activity or Cruise Information
Cruise
| Cruise Name | JR16005 |
| Departure Date | 2017-03-17 |
| Arrival Date | 2017-05-08 |
| Principal Scientist(s) | Alberto C Naveira Garabato (University of Southampton School of Ocean and Earth Science), Povl Abrahamsen (British Antarctic Survey) |
| Ship | RRS James Clark Ross |
Complete Cruise Metadata Report is available here
Fixed Station Information
No Fixed Station Information held for the Series
BODC Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| Blank | Unqualified |
| < | Below detection limit |
| > | In excess of quoted value |
| A | Taxonomic flag for affinis (aff.) |
| B | Beginning of CTD Down/Up Cast |
| C | Taxonomic flag for confer (cf.) |
| D | Thermometric depth |
| E | End of CTD Down/Up Cast |
| G | Non-taxonomic biological characteristic uncertainty |
| H | Extrapolated value |
| I | Taxonomic flag for single species (sp.) |
| K | Improbable value - unknown quality control source |
| L | Improbable value - originator's quality control |
| M | Improbable value - BODC quality control |
| N | Null value |
| O | Improbable value - user quality control |
| P | Trace/calm |
| Q | Indeterminate |
| R | Replacement value |
| S | Estimated value |
| T | Interpolated value |
| U | Uncalibrated |
| W | Control value |
| X | Excessive difference |
SeaDataNet Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| 0 | no quality control |
| 1 | good value |
| 2 | probably good value |
| 3 | probably bad value |
| 4 | bad value |
| 5 | changed value |
| 6 | value below detection |
| 7 | value in excess |
| 8 | interpolated value |
| 9 | missing value |
| A | value phenomenon uncertain |
| B | nominal value |
| Q | value below limit of quantification |
