Metadata Report for BODC Series Reference Number 2052084
Metadata Summary
Problem Reports
Data Access Policy
Narrative Documents
Project Information
Data Activity or Cruise Information
Fixed Station Information
BODC Quality Flags
SeaDataNet Quality Flags
Metadata Summary
Data Description |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Data Identifiers |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Time Co-ordinates(UT) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Spatial Co-ordinates | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Parameters |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Problem Reports
No Problem Report Found in the Database
JR16005 VMADCP Quality Control Report
Six large gaps made up of entirely null cycles were identified in the data throughout the cruise. These null cycles have been removed:
- 19 March 2017 20:44:37 hours to 20 March 2017 10:48:48 hours
- 20 March 2017 20:00:46 hours to 20 March 2017 22:13:07 hours
- 30 March 2017 02:58:49 hours to 31 March 2017 03:12:49 hours
- 01 April 2017 03:40:47 hours to 02 April 2017 03:14:48 hours
- 07 April 2017 03:28:48 hours to 08 April 2017 03:00:48 hours
- 28 April 2017 07:30:48 hours to 29 April 2017 10:08:47 hours
In addition to these gaps, there are shorter periods of null data. For these shorter periods, sometimes only 1 cycle long, the time channel value has been set based on the cycles being every 120 seconds.
Data is very intermittent on the 20th of March.
LCEWAS01 & LCNSAS01
LERRAS01
Data Access Policy
Open Data
These data have no specific confidentiality restrictions for users. However, users must acknowledge data sources as it is not ethical to publish data without proper attribution. Any publication or other output resulting from usage of the data should include an acknowledgment.
If the Information Provider does not provide a specific attribution statement, or if you are using Information from several Information Providers and multiple attributions are not practical in your product or application, you may consider using the following:
"Contains public sector information licensed under the Open Government Licence v1.0."
Narrative Documents
RD Instruments- Ocean Surveyor 75kHz Vessel mounted ADCP.
| Long-Range Mode | ||
|---|---|---|
| Vertical Resolution Cell Size3 | Max. Range (m)1 | Precision (cm/s)2 |
| 8m | 520 - 650 | 30 |
| 16m | 560 - 700 | 17 |
| High-Precision Mode | ||
| Vertical Resolution Cell Size3 | Max. Range (m)1 | Precision (cm/s)2 |
| 8m | 310 - 430 | 12 |
| 16m | 350 - 450 | 9 |
1 Ranges at 1 to 5 knots ship speed are typical and vary with situation.
2 Single-ping standard deviation.
3 User's choice of depth cell size is not limited to the typical values specified.
Profile Parameters
- Velocity long-term accuracy (typical): ±1.0%, ±0.5cm/s
- Velocity range: -5 to 9m/s
- # of depth cells: 1 - 128
- Max ping rate: 0.7
Bottom Track
Maximum altitude (precision <2cm/s): 950m
Echo Intensity Profile
Dynamic range: 80dB
Precision: ±1.5dB
Transducer and Hardware
Beam angle: 30°
Configuration: 4-beam phased array
Communications: RS-232 or RS-422 hex-ASCII or binary output at 1200 - 115,200 baud
Output power: 1000W
Standard Sensors
Temperature (mounted on transducer)
- Range: -5° to 45°C
- Precision: ±0.1°C
- Resolution: 0.03°
Environmental
Operating temperature: -5° to 40°C (-5° to 45°C)*
Storage temperature: -30° to 50°C (-30° to 60°C)*
*later instruments have greater range.
Web Page
Further details can be found on the manufacturer's website or in the specification sheet
Processing by BODC of JR16005 cruise Vessel Mounted ADCP data
The data arrived at BODC as a matlab file (.mat) which contained matrices of the various variables collected from the 75kHz ship mounted ADCP on JR16005. The data were reformatted to BODC's internal NetCDF format. The following table shows the mapping of original variables to the appropriate BODC parameter codes:
| Originator's Variable | Originator's Units | BODC Parameter Code | BODC Units | Comment |
|---|---|---|---|---|
| U | m/s | LCEWAS01 | cm/s | Unit conversion applied (*100). Eastward values are positive, and values are corrected for ship's velocity. |
| V | m/s | LCNSAS01 | cm/s | Unit conversion applied (*100). Northward values are positive, and values are corrected for ship's velocity. |
| ERR | m/s | LERRAS01 | cm/s | Unit conversion applied (*100). |
| PG | % | PCGDAP01 | % | - |
| AMP | dB | ASAMAS01 | dB | - |
| depth | m | DBINAA01 | m | - |
| U_ship | m/s | APEWGP01 | cm/s | Unit conversion applied (*100). Eastward values are positive. |
| V_ship | m/s | APNSGP01 | cm/s | Unit conversion applied (*100). Northward values are positive. |
| lat | degrees | ALATGP01 | degrees | - |
| lon | degrees | ALONGP01 | degrees | - |
| Heading | degrees | APDAGP01 | degrees | - |
| Pitch | degrees | PTCHGP01 | degrees | - |
| Roll | degrees | ROLLGP01 | degrees | - |
The reformatted data were visualised using the in-house EDSERPLO software. Suspect data were marked by adding an appropriate quality control flag, and missing data were set to an appropriate value and flagged.
Processing by Originator of JR16005 cruise Vessel Mounted ADCP data
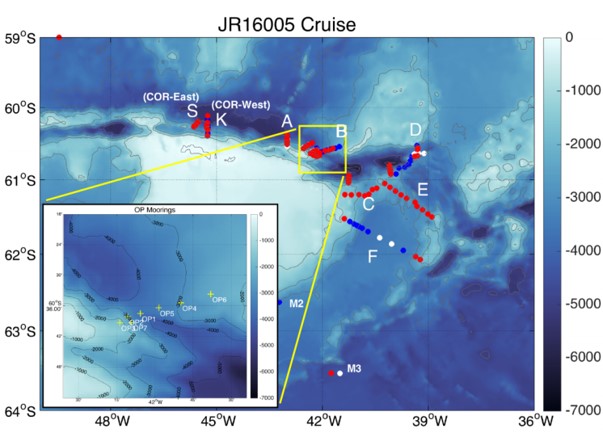
A Teledyne RDI Ocean Surveyor 75 kHz mounted on the RRS James Clark Ross was used to collect ADCP data throughout the JR16005 cruise. The cruise occurred between the 17th of March 2017 and the 8th of May 2017 in the regions of Orkney Passage, Scotia Sea.
Data were recorded using VmDas software.
ADCP setup
| Variable | Teledyne RDI OS 75 kHz VMADCP |
|---|---|
| Number of Bins | 100 |
| Bin size | 8 m |
| Blanking distance | 8 m |
| Range | 22 - 820 m |
The instrument's ping rate was set independently from the SIMRAD Synchronization Unit, which means that it has its own internal ping rate. The tranducer misalignment angle was set to 60.08°.
The instrument was set in "narrowband" mode.
Data Processing
The data were post-processed through a set of Matlab scripts to quality check the data and calibrate the ADCP misalignment angle and amplitude factors.
The performance of the ADCP was seen to be heavily weather dependent. In times of low windspeeds and relatively calm waters percentage of good values exceeded 50% at depths below 500 m, however at times of rough weather the performance deteriorated, and data quality issues prevented processing.
Additional information can be found in the JR16005 cruise report:
Naveira-Garabato, A. et al., 2017 RRS James Cook Cruise JR16005, 17 Mar - 08 May 2017. The Dynamics of the Orkney Passage Outflow (DynOPO). Southampton, UK: National Oceanography Centre, Southampton, 222pp., National Oceanography Centre Cruise Report, No. 47. https://www.bodc.ac.uk/resources/inventories/cruise_inventory/reports/jr16005.pdf
Project Information
Dynamics of Orkney Passage Outflow (DynOPO)
DynOPO is a five year research project that aims to understand how Antarctic Bottom Water is exported and modified through the Orkney Passage, the overflow's controlling dynamics, and its downstream impact on the Atlantic Ocean abyss.
Introduction
Mooring data collected for the DynOPO project are a component of a long term time series, in association with the Ocean Regulation of Climate by Heat and Carbon Sequestration and Transports (ORCHESTRA) project, led by Emily Shuckburgh (British Antarctic Survey) since 2016. The time series originally started out as part of the British Antarctic Survey's Long-Term Monitoring and Survey (LTMS) programme. Moorings were deployed on RRS James Clark Ross cruise JR20150309 (JR310 and JR272D) which ran from 09 March to 14 April 2015. RRS James Clark Ross cruise JR16005 ran from 17 March to 08 May 2017 and was the primary fieldwork element of the DynOPO project. The cruise had two main goals: (1) to conduct measurements of the hydrographic properties, velocity and turbulent processes of the Antarctic Bottom Water outflow along its pathway through the Orkney Passage region; and (2) to turn around a set of long-term moorings deployed in the area by British Antarctic Survey (BAS) and Lamont-Doherty Earth Observatory (LDEO) scientists, including recovery of additional instruments on some of the moorings deployed by JR20150309.
Project Collaborators
The project was led by the University of Southampton, and is an international collaboration with;
- UK: British Antarctic Survey (BAS), UK Meteorological Office, University of East Anglia and Newcastle University;
- Europe: University of Gothenburg (Sweden), University of Paris 6 (France);
- Australia: University of Tasmania;
- US: Lamont Doherty Earth Observatory, Woods Hole Oceanographic Institute, NOAA, University of California, Washington State University and Princeton University
Funding
The project was funded by the Natural Environment Research Council and ran from March 2015 to November 2018.
Data Activity or Cruise Information
Cruise
| Cruise Name | JR16005 |
| Departure Date | 2017-03-17 |
| Arrival Date | 2017-05-08 |
| Principal Scientist(s) | Alberto C Naveira Garabato (University of Southampton School of Ocean and Earth Science), Povl Abrahamsen (British Antarctic Survey) |
| Ship | RRS James Clark Ross |
Complete Cruise Metadata Report is available here
Fixed Station Information
No Fixed Station Information held for the Series
BODC Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| Blank | Unqualified |
| < | Below detection limit |
| > | In excess of quoted value |
| A | Taxonomic flag for affinis (aff.) |
| B | Beginning of CTD Down/Up Cast |
| C | Taxonomic flag for confer (cf.) |
| D | Thermometric depth |
| E | End of CTD Down/Up Cast |
| G | Non-taxonomic biological characteristic uncertainty |
| H | Extrapolated value |
| I | Taxonomic flag for single species (sp.) |
| K | Improbable value - unknown quality control source |
| L | Improbable value - originator's quality control |
| M | Improbable value - BODC quality control |
| N | Null value |
| O | Improbable value - user quality control |
| P | Trace/calm |
| Q | Indeterminate |
| R | Replacement value |
| S | Estimated value |
| T | Interpolated value |
| U | Uncalibrated |
| W | Control value |
| X | Excessive difference |
SeaDataNet Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| 0 | no quality control |
| 1 | good value |
| 2 | probably good value |
| 3 | probably bad value |
| 4 | bad value |
| 5 | changed value |
| 6 | value below detection |
| 7 | value in excess |
| 8 | interpolated value |
| 9 | missing value |
| A | value phenomenon uncertain |
| B | nominal value |
| Q | value below limit of quantification |
