Metadata Report for BODC Series Reference Number 832674
Metadata Summary
Problem Reports
Data Access Policy
Narrative Documents
Project Information
Data Activity or Cruise Information
Fixed Station Information
BODC Quality Flags
SeaDataNet Quality Flags
Metadata Summary
Data Description |
|||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||
Data Identifiers |
|||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||
Time Co-ordinates(UT) |
|||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||
Spatial Co-ordinates | |||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||
Parameters |
|||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||
Problem Reports
No Problem Report Found in the Database
Data Access Policy
Open Data
These data have no specific confidentiality restrictions for users. However, users must acknowledge data sources as it is not ethical to publish data without proper attribution. Any publication or other output resulting from usage of the data should include an acknowledgment.
If the Information Provider does not provide a specific attribution statement, or if you are using Information from several Information Providers and multiple attributions are not practical in your product or application, you may consider using the following:
"Contains public sector information licensed under the Open Government Licence v1.0."
Narrative Documents
Neil Brown MK3 CTD
The Neil Brown MK3 conductivity-temperature-depth (CTD) profiler consists of an integral unit containing pressure, temperature and conductivity sensors with an optional dissolved oxygen sensor in a pressure-hardened casing. The most widely used variant in the 1980s and 1990s was the MK3B. An upgrade to this, the MK3C, was developed to meet the requirements of the WOCE project.
The MK3C includes a low hysteresis, titanium strain gauge pressure transducer. The transducer temperature is measured separately, allowing correction for the effects of temperature on pressure measurements. The MK3C conductivity cell features a free flow, internal field design that eliminates ducted pumping and is not affected by external metallic objects such as guard cages and external sensors.
Additional optional sensors include pH and a pressure-temperature fluorometer. The instrument is no longer in production, but is supported (repair and calibration) by General Oceanics.
Specifications
These specification apply to the MK3C version.
| Pressure | Temperature | Conductivity | |
| Range | 6500 m 3200 m (optional) | -3 to 32°C | 1 to 6.5 S cm-1 |
| Accuracy | 0.0015% FS 0.03% FS < 1 msec | 0.0005°C 0.003°C < 30 msec | 0.0001 S cm-1 0.0003 S cm-1 < 30 msec |
Further details can be found in the specification sheet.
RRS Challenger 108C CTD Data Documentation
Instrumentation
The CTD profiles were taken with an RVS Neil Brown Systems Mk3B CTD incorporating a pressure sensor, conductivity cell, platinum resistance thermometer and a Beckmann dissolved oxygen sensor. The CTD unit was mounted vertically in the centre of a protective cage approximately 1.5 m square. Attached to the bars of the frame were a Chelsea Instruments Aquatracka fluorometer and a SeaTech red light (661 nm) transmissometer with a 25 cm path length.
Above the frame was a General Oceanics rosette sampler fitted with twelve 10-litre water bottles. These comprised a mixture of Niskin, general purpose Go-Flo and ultra-clean teflon lined Go-Flo bottles as dictated by sampling requirements. The bases of the bottles were 0.75 m above the pressure head and their tops 1.55 m above it. One bottle was fitted with a holder for twin digital reversing thermometers mounted 1.38 m above the CTD temperature sensor.
Above the rosette was a PML 2pi PAR (photosynthetically available radiation) sensor pointing upwards to measure downwelling irradiance. A second 2pi PAR sensor, pointing downwards, was fitted to the bottom of the cage to measure upwelling irradiance. It should be noted that these sensors were vertically separated by 2 metres with the upwelling sensor 0.2 metres below the pressure head and the downwelling sensor 1.75 metres above it.
No account has been taken of rig geometry in the compilation of the CTD data set. However, all water bottle sampling depths have been corrected for rig geometry and represent the true position of the midpoint of the water bottle in the water column.
Data Acquisition
On each cast the CTD was lowered to a depth of approximately 5 metres and held until the oxygen reading stabilised. It was then raised to the surface and lowered continuously at 0.5 to 1.0 m s-1 to the closest comfortable proximity to the sea floor. The upcast was done in stages between the bottle firing depths.
Data were logged by the Research Vessel Services ABC data logging system. Output channels from the deck unit were logged at 16 Hz by a microprocessor interface (the Level A) which passed time stamped averaged cycles at 1Hz to a Sun workstation (the Level C) via a buffering system (the Level B).
On-Board Data Processing
The raw data comprised ADC counts. These were converted into engineering units (Volts for PAR meters, fluorometer and transmissometer; ml l-1for oxygen; mohms cm-1 for conductivity; °C for temperature; decibars for pressure) by the application of laboratory determined calibrations. Salinity (Practical Salinity Units as defined in Fofonoff and Millard,1983) was calculated from the conductivity ratios (conductivity / 42.914) and a time lagged temperature using the function described in UNESCO Report 37 (1981) .
The data were submitted to BODC in this form on Quarter Inch Cartridge tapes in RVS internal format for post-cruise processing and databanking.
Post-Cruise Processing
Reformatting
The data were converted into the BODC internal format (PXF) to allow the use of in-house software tools, notably the workstation graphics editor. In addition to reformatting, the transfer program applied the following modifications to the data:
- Dissolved oxygen was converted from ml l-1 to µM by multiplying the values by 44.66.
- Transmissometer voltages were corrected to the manufacturer's specified voltage (4.747V) by ratio using transmissometer air readings recorded during the cruise (4.727V).
- Transmissometer voltages were converted to percentage transmission by multiplying them by a factor of 20.
- The transmissometer data were converted to attenuance using the algorithm:-
| attenuance = -4 * ln (percent transmittance / 100) |
Editing
Reformatted CTD data were transferred onto a high speed graphics workstation. Using custom in-house graphics editors, downcasts and upcasts were differentiated and the limits of the downcasts and upcasts were manually flagged.
Secondly, spikes on all the downcast channels were manually flagged. No data values were edited or deleted; quality control was achieved by modification of the associated quality control flag.
The pressure ranges over which the bottle samples were being collected were logged by manual interaction with the software. Usually, the marked reaction of the oxygen sensor to the bottle firing sequence was used to determine this. These pressure ranges were subsequently used, in conjunction with a geometrical correction for the position of the water bottles with respect to the CTD pressure transducer, to determine the pressure range of data to be averaged for calibration values.
Once screened on the workstation, the CTD downcasts were loaded into a database under the ORACLE Relational DataBase Management System. The fluorometer was obviously malfunctioning on this cruise. The signal was noisy and baseline drift between casts exceeded the total signal. Consequently, all fluorometer data were flagged as suspect after loading into the database.
Calibration
With the exception of pressure, calibrations were done by comparison of CTD data against measurements made on water bottle samples or, for temperature, from the reversing thermometers mounted on the water bottles. In general, values were averaged from the CTD downcasts but where inspection on a graphics workstation showed significant hysteresis, values were manually extracted from the CTD upcasts.
All calibrations described here have been applied to the data.
Pressure
The pressure offset was determined by looking at the pressures recorded when the CTD was clearly logging in air (readily apparent from the conductivity channel). The offsets formed two distinct value clusters. Consequently two calibrations have been applied thus:
| CTD1 to CTD25 | Corrected pressure = Observed pressure + 1.47 |
| CTD26 to CTD31 | Corrected pressure = Observed pressure + 0.57 |
Temperature
The CTD temperature was compared with the digital reversing thermometers attached to the water bottles and was found to agree closely. Consequently, no correction has been applied to the temperature data.
Salinity
Salinity was calibrated against water bottle samples measured on the Guildline 55358 Autolab Salinometer during the cruise. Samples were randomly taken from the bottles fired on 28 casts.
Samples were collected in glass bottles filled to just below the neck and sealed with plastic stoppers. Batches of samples were left for at least 24 hours to reach thermal equilibrium in the constant temperature laboratory containing the salinometer before analysis.
The correction offset for this cruise was found to be 0.00 ± 0.002, hence no calibration was required.
Oxygen
The dissolved oxygen sensor was calibrated against Winkler titration data as a primary standard and calibrated data from the Endeco underway sensor as a secondary standard. The oxygen titrations were undertaken using an automated titration technique similar to that described in Williams and Jenkinson (1982).
The following calibration equation was determined by regression analysis:
| Corrected Oxygen = Observed Oxygen + 206 (R2 = 50.8%, n=31) |
Chlorophyll
The fluorometer malfunctioned on this cruise and consequently no CTD chlorophyll data are available. Users requiring chlorophyll data are referred to the water bottle and continuous underway data sets.
PAR
The light meter voltages were converted to µE/m2/s using the following equations determined by RVS in February 1990.
| Downwelling PAR = exp (-4.977 * V + 7.0040) * 0.0375 |
| Upwelling PAR = exp (-5.031* V + 6.8751) * 0.0375 |
Note that the scaling constant of 0.0375 is an empirical conversion from µW/cm2. The data may therefore be converted to W/m2 by dividing by 3.75 if required.
Suspended Particulate Matter
The attenuance data were calibrated in terms of suspended particulate material by regressing attenuance values at the bottle firing depths against gravimetric determinations of sediment load. Data from all three legs of CH108 were pooled to produce a single calibration.
The calibration obtained was:
| Suspended particulate load = (attenuance + 0.8188) / 0.2286 (n=61; R2=81.0%) |
It should be noted that the intercept of this calibration (-0.82) differs significantly from the theoretically predicted value of 0.37.
Data Reduction
Once all screening and calibration procedures were completed, the data set was binned to 2 db (casts deeper than 100 db) or 1 db (casts shallower than 100 db). The binning algorithm excluded any data points flagged suspect and attempted linear interpolation over gaps up to 3 bins wide. If any gaps larger than this were encountered, the data in the gaps were set null.
Oxygen saturation data in the database have been computed from the calibrated oxygen, temperature and salinity data using the algorithm of Benson and Krause (1984).
Data Warnings
There are no fluorometer data from this cruise.
The intercept of the transmissometer SPM calibration deviates significantly from the theoretically predicted value.
References
Benson B.B. and Krause D. jnr. 1984. The concentration and isotopic fractionation of oxygen dissolved in fresh water and sea water in equilibrium with the atmosphere. Limnol. Oceanogr. 29 pp.620.632.
Fofonoff N.P. and Millard Jr., R.C. 1982. Algorithms for Computation of Fundamental Properties of Seawater. UNESCO Technical Papers in Marine Science 44.
Williams P.J. leB, and Jenkinson N.W. 1982. A transportable microprocessor-controlled Winkler titration suitable for field station and shipboard use. Limnol.Oceanogr. 27 pp.567-585.
Project Information
Land Ocean Interaction Study (LOIS)
Introduction
The Land Ocean Interaction Study (LOIS) was a Community Research Project of the Natural Environment Research Council (NERC). The broad aim of LOIS was to gain an understanding of, and an ability to predict, the nature of environmental change in the coastal zone around the UK through an integrated study from the river catchments through to the shelf break.
LOIS was a collaborative, multidisciplinary study undertaken by scientists from NERC research laboratories and Higher Education institutions. The LOIS project was managed from NERC's Plymouth Marine Laboratory.
The project ran for six years from April 1992 until April 1998 with a further modelling and synthesis phase beginning in April 1998 and ending in April 2000.
Project Structure
LOIS consisted of the following components:
- River-Atmosphere-Coast Study (RACS)
- RACS(A) - Atmospheric sub-component
- RACS(C) - Coasts sub-component
- RACS(R) - Rivers sub-component
- BIOTA - Terrestrial salt marsh study
- Land Ocean Evolution Perspective Study (LOEPS)
- Shelf-Edge Study (SES)
- North Sea Modelling Study (NORMS)
- Data Management (DATA)
Marine Fieldwork
Marine field data were collected between September 1993 and September 1997 as part of RACS(C) and SES. The RACS data were collected throughout this period from the estuaries and coastal waters of the UK North Sea coast from Great Yarmouth to the Tweed. The SES data were collected between March 1995 and September 1996 from the Hebridean slope. Both the RACS and SES data sets incorporate a broad spectrum of measurements collected using moored instruments and research vessel surveys.
Data Activity or Cruise Information
Cruise
| Cruise Name | CH108C |
| Departure Date | 1993-12-11 |
| Arrival Date | 1993-12-23 |
| Principal Scientist(s) | Geoff Millward (University of Plymouth Institute of Marine Studies) |
| Ship | RRS Challenger |
Complete Cruise Metadata Report is available here
Fixed Station Information
Fixed Station Information
| Station Name | LOIS (RACS) Humber-Wash Grid HW |
| Category | Offshore area |
| Latitude | 53° 18.98' N |
| Longitude | 0° 46.43' E |
| Water depth below MSL |
LOIS (RACS) Humber-Wash Grid HW
The Humber-Wash grid was one of two areas sampled during the LOIS(RACS) project. The measurements collected lie within an area with its centre point at 53.3163N 0.7739E and which stretches from the Wash to the Humber Estuary. Note: Site HW5 was also known as anchor station HAS1.
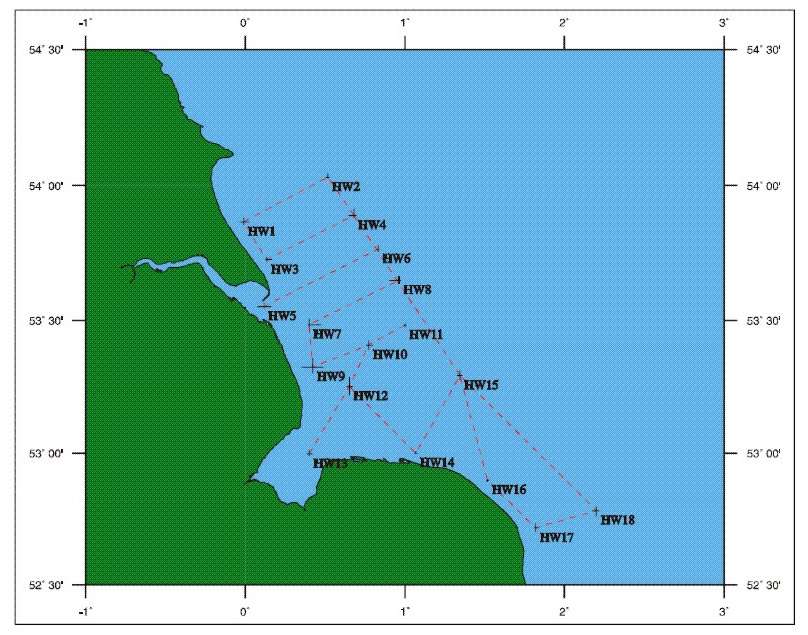
CTD casts were performed by several cruises between December 1992 and July 1995.
Related Fixed Station activities are detailed in Appendix 1
BODC Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| Blank | Unqualified |
| < | Below detection limit |
| > | In excess of quoted value |
| A | Taxonomic flag for affinis (aff.) |
| B | Beginning of CTD Down/Up Cast |
| C | Taxonomic flag for confer (cf.) |
| D | Thermometric depth |
| E | End of CTD Down/Up Cast |
| G | Non-taxonomic biological characteristic uncertainty |
| H | Extrapolated value |
| I | Taxonomic flag for single species (sp.) |
| K | Improbable value - unknown quality control source |
| L | Improbable value - originator's quality control |
| M | Improbable value - BODC quality control |
| N | Null value |
| O | Improbable value - user quality control |
| P | Trace/calm |
| Q | Indeterminate |
| R | Replacement value |
| S | Estimated value |
| T | Interpolated value |
| U | Uncalibrated |
| W | Control value |
| X | Excessive difference |
SeaDataNet Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| 0 | no quality control |
| 1 | good value |
| 2 | probably good value |
| 3 | probably bad value |
| 4 | bad value |
| 5 | changed value |
| 6 | value below detection |
| 7 | value in excess |
| 8 | interpolated value |
| 9 | missing value |
| A | value phenomenon uncertain |
| B | nominal value |
| Q | value below limit of quantification |
Appendix 1: LOIS (RACS) Humber-Wash Grid HW
Related series for this Fixed Station are presented in the table below. Further information can be found by following the appropriate links.
If you are interested in these series, please be aware we offer a multiple file download service. Should your credentials be insufficient for automatic download, the service also offers a referral to our Enquiries Officer who may be able to negotiate access.
| Series Identifier | Data Category | Start date/time | Start position | Cruise |
|---|---|---|---|---|
| 843856 | CTD or STD cast | 1992-12-09 15:05:00 | 53.54617 N, 0.1045 E | RRS Challenger CH99 |
| 2093655 | Water sample data | 1992-12-09 15:09:00 | 53.54622 N, 0.10448 E | RRS Challenger CH99 |
| 843868 | CTD or STD cast | 1992-12-09 16:05:00 | 53.54617 N, 0.1005 E | RRS Challenger CH99 |
| 2093772 | Water sample data | 1992-12-09 16:09:00 | 53.54624 N, 0.10047 E | RRS Challenger CH99 |
| 843881 | CTD or STD cast | 1992-12-09 16:58:00 | 53.5465 N, 0.10033 E | RRS Challenger CH99 |
| 2093888 | Water sample data | 1992-12-09 16:59:00 | 53.54655 N, 0.10039 E | RRS Challenger CH99 |
| 843893 | CTD or STD cast | 1992-12-09 18:00:00 | 53.54633 N, 0.10167 E | RRS Challenger CH99 |
| 2094019 | Water sample data | 1992-12-09 18:04:30 | 53.5464 N, 0.10174 E | RRS Challenger CH99 |
| 843900 | CTD or STD cast | 1992-12-09 18:59:00 | 53.547 N, 0.102 E | RRS Challenger CH99 |
| 2094100 | Water sample data | 1992-12-09 19:02:00 | 53.54698 N, 0.10205 E | RRS Challenger CH99 |
| 843912 | CTD or STD cast | 1992-12-09 20:03:00 | 53.54567 N, 0.10367 E | RRS Challenger CH99 |
| 2094148 | Water sample data | 1992-12-09 20:05:00 | 53.5456 N, 0.10363 E | RRS Challenger CH99 |
| 843924 | CTD or STD cast | 1992-12-09 21:01:00 | 53.5455 N, 0.104 E | RRS Challenger CH99 |
| 2094173 | Water sample data | 1992-12-09 21:05:00 | 53.54542 N, 0.104 E | RRS Challenger CH99 |
| 843936 | CTD or STD cast | 1992-12-09 21:59:00 | 53.54533 N, 0.10433 E | RRS Challenger CH99 |
| 2094197 | Water sample data | 1992-12-09 22:03:30 | 53.54534 N, 0.10427 E | RRS Challenger CH99 |
| 843948 | CTD or STD cast | 1992-12-09 22:58:00 | 53.54533 N, 0.104 E | RRS Challenger CH99 |
| 2093563 | Water sample data | 1992-12-09 23:00:00 | 53.54539 N, 0.10399 E | RRS Challenger CH99 |
| 844104 | CTD or STD cast | 1992-12-10 01:02:00 | 53.54533 N, 0.10283 E | RRS Challenger CH99 |
| 2092836 | Water sample data | 1992-12-10 01:06:00 | 53.54534 N, 0.10278 E | RRS Challenger CH99 |
| 2093587 | Water sample data | 1992-12-10 01:06:00 | 53.54534 N, 0.10278 E | RRS Challenger CH99 |
| 843961 | CTD or STD cast | 1992-12-10 02:00:00 | 53.54617 N, 0.10233 E | RRS Challenger CH99 |
| 2092848 | Water sample data | 1992-12-10 02:02:30 | 53.54609 N, 0.10226 E | RRS Challenger CH99 |
| 2093599 | Water sample data | 1992-12-10 02:02:30 | 53.54609 N, 0.10226 E | RRS Challenger CH99 |
| 843973 | CTD or STD cast | 1992-12-10 03:00:00 | 53.54583 N, 0.101 E | RRS Challenger CH99 |
| 2092861 | Water sample data | 1992-12-10 03:04:00 | 53.5458 N, 0.10102 E | RRS Challenger CH99 |
| 2093606 | Water sample data | 1992-12-10 03:04:00 | 53.5458 N, 0.10102 E | RRS Challenger CH99 |
| 843985 | CTD or STD cast | 1992-12-10 04:03:00 | 53.546 N, 0.10117 E | RRS Challenger CH99 |
| 2092873 | Water sample data | 1992-12-10 04:04:30 | 53.54599 N, 0.10113 E | RRS Challenger CH99 |
| 2093618 | Water sample data | 1992-12-10 04:04:30 | 53.54599 N, 0.10113 E | RRS Challenger CH99 |
| 844116 | CTD or STD cast | 1992-12-10 05:00:00 | 53.54617 N, 0.101 E | RRS Challenger CH99 |
| 2092885 | Water sample data | 1992-12-10 05:03:30 | 53.54615 N, 0.10107 E | RRS Challenger CH99 |
| 2093631 | Water sample data | 1992-12-10 05:03:30 | 53.54615 N, 0.10107 E | RRS Challenger CH99 |
| 843997 | CTD or STD cast | 1992-12-10 06:00:00 | 53.54633 N, 0.10217 E | RRS Challenger CH99 |
| 2092897 | Water sample data | 1992-12-10 06:03:30 | 53.54626 N, 0.10218 E | RRS Challenger CH99 |
| 2093643 | Water sample data | 1992-12-10 06:03:30 | 53.54626 N, 0.10218 E | RRS Challenger CH99 |
| 844000 | CTD or STD cast | 1992-12-10 07:00:00 | 53.54583 N, 0.10283 E | RRS Challenger CH99 |
| 2092904 | Water sample data | 1992-12-10 07:02:00 | 53.54591 N, 0.1029 E | RRS Challenger CH99 |
| 844128 | CTD or STD cast | 1992-12-10 08:22:00 | 53.54533 N, 0.10417 E | RRS Challenger CH99 |
| 832035 | CTD or STD cast | 1993-11-12 15:29:00 | 53.86117 N, 0.006 W | RRS Challenger CH108A |
| 832047 | CTD or STD cast | 1993-11-12 18:16:00 | 54.0325 N, 0.52267 E | RRS Challenger CH108A |
| 832059 | CTD or STD cast | 1993-11-12 19:50:00 | 53.896 N, 0.68717 E | RRS Challenger CH108A |
| 832060 | CTD or STD cast | 1993-11-12 23:01:00 | 53.725 N, 0.159 E | RRS Challenger CH108A |
| 832072 | CTD or STD cast | 1993-11-13 02:01:00 | 53.75867 N, 0.84033 E | RRS Challenger CH108A |
| 832084 | CTD or STD cast | 1993-11-13 05:05:00 | 53.48483 N, 0.39867 E | RRS Challenger CH108A |
| 832096 | CTD or STD cast | 1993-11-13 07:56:00 | 53.65533 N, 0.9725 E | RRS Challenger CH108A |
| 832103 | CTD or STD cast | 1993-11-13 09:39:00 | 53.48617 N, 0.99783 E | RRS Challenger CH108A |
| 832115 | CTD or STD cast | 1993-11-13 11:03:00 | 53.41917 N, 0.75583 E | RRS Challenger CH108A |
| 832127 | CTD or STD cast | 1993-11-13 16:50:00 | 53.54933 N, 0.14317 E | RRS Challenger CH108A |
| 832324 | CTD or STD cast | 1993-11-13 19:21:00 | 53.34367 N, 0.48183 E | RRS Challenger CH108A |
| 832139 | CTD or STD cast | 1993-11-13 20:41:00 | 53.42383 N, 0.774 E | RRS Challenger CH108A |
| 832140 | CTD or STD cast | 1993-11-13 22:50:00 | 53.25383 N, 0.6475 E | RRS Challenger CH108A |
| 832336 | CTD or STD cast | 1993-11-15 12:31:00 | 53.00067 N, 0.398 E | RRS Challenger CH108A |
| 832152 | CTD or STD cast | 1993-11-15 17:32:00 | 53.0 N, 1.066 E | RRS Challenger CH108A |
| 1285094 | Water sample data | 1993-11-15 17:34:00 | 52.99999 N, 1.06608 E | RRS Challenger CH108A |
| 832164 | CTD or STD cast | 1993-11-15 20:05:00 | 53.29033 N, 1.3515 E | RRS Challenger CH108A |
| 1285101 | Water sample data | 1993-11-15 20:08:00 | 53.29039 N, 1.3515 E | RRS Challenger CH108A |
| 832348 | CTD or STD cast | 1993-11-15 22:38:00 | 52.8975 N, 1.52317 E | RRS Challenger CH108A |
| 1285113 | Water sample data | 1993-11-15 22:42:00 | 52.89743 N, 1.52323 E | RRS Challenger CH108A |
| 832176 | CTD or STD cast | 1993-11-16 00:29:00 | 52.72 N, 1.81767 E | RRS Challenger CH108A |
| 1285125 | Water sample data | 1993-11-16 00:32:00 | 52.72001 N, 1.81761 E | RRS Challenger CH108A |
| 832188 | CTD or STD cast | 1993-11-16 02:21:00 | 52.78817 N, 2.19967 E | RRS Challenger CH108A |
| 1285137 | Water sample data | 1993-11-16 02:24:00 | 52.78819 N, 2.19971 E | RRS Challenger CH108A |
| 831972 | CTD or STD cast | 1993-11-19 18:36:00 | 53.71933 N, 0.13917 E | RRS Challenger CH108A |
| 832300 | CTD or STD cast | 1993-11-20 01:17:00 | 53.54917 N, 0.1355 E | RRS Challenger CH108A |
| 831984 | CTD or STD cast | 1993-11-20 02:45:00 | 53.49633 N, 0.40033 E | RRS Challenger CH108A |
| 831996 | CTD or STD cast | 1993-11-20 05:16:00 | 53.6525 N, 0.9645 E | RRS Challenger CH108A |
| 831486 | CTD or STD cast | 1993-11-21 05:38:00 | 53.221 N, 0.63617 E | RRS Challenger CH108A |
| 831498 | CTD or STD cast | 1993-11-21 08:06:00 | 52.99833 N, 0.40283 E | RRS Challenger CH108A |
| 831505 | CTD or STD cast | 1993-11-21 13:18:00 | 53.33883 N, 0.48083 E | RRS Challenger CH108A |
| 831517 | CTD or STD cast | 1993-11-21 16:33:00 | 53.54933 N, 0.1185 E | RRS Challenger CH108A |
| 1285266 | Water sample data | 1993-11-21 16:35:00 | 53.54939 N, 0.11848 E | RRS Challenger CH108A |
| 831529 | CTD or STD cast | 1993-11-21 17:01:00 | 53.5495 N, 0.11767 E | RRS Challenger CH108A |
| 1285278 | Water sample data | 1993-11-21 17:02:00 | 53.54954 N, 0.11767 E | RRS Challenger CH108A |
| 831462 | CTD or STD cast | 1993-11-21 17:31:00 | 53.54917 N, 0.117 E | RRS Challenger CH108A |
| 1285291 | Water sample data | 1993-11-21 17:33:00 | 53.54917 N, 0.11698 E | RRS Challenger CH108A |
| 831530 | CTD or STD cast | 1993-11-21 18:01:00 | 53.54967 N, 0.11667 E | RRS Challenger CH108A |
| 1285309 | Water sample data | 1993-11-21 18:03:00 | 53.54963 N, 0.11666 E | RRS Challenger CH108A |
| 831542 | CTD or STD cast | 1993-11-21 18:33:00 | 53.54983 N, 0.11633 E | RRS Challenger CH108A |
| 1285310 | Water sample data | 1993-11-21 18:33:00 | 53.54981 N, 0.1163 E | RRS Challenger CH108A |
| 831554 | CTD or STD cast | 1993-11-21 19:01:00 | 53.54983 N, 0.11617 E | RRS Challenger CH108A |
| 831566 | CTD or STD cast | 1993-11-21 19:33:00 | 53.55 N, 0.11617 E | RRS Challenger CH108A |
| 1285322 | Water sample data | 1993-11-21 19:35:00 | 53.55005 N, 0.11622 E | RRS Challenger CH108A |
| 831578 | CTD or STD cast | 1993-11-21 20:04:00 | 53.5505 N, 0.11617 E | RRS Challenger CH108A |
| 831591 | CTD or STD cast | 1993-11-21 20:33:00 | 53.55017 N, 0.116 E | RRS Challenger CH108A |
| 1285334 | Water sample data | 1993-11-21 20:35:00 | 53.55015 N, 0.11603 E | RRS Challenger CH108A |
| 831609 | CTD or STD cast | 1993-11-21 21:02:00 | 53.55033 N, 0.116 E | RRS Challenger CH108A |
| 831610 | CTD or STD cast | 1993-11-21 21:32:00 | 53.55033 N, 0.11583 E | RRS Challenger CH108A |
| 1285346 | Water sample data | 1993-11-21 21:34:00 | 53.55034 N, 0.11588 E | RRS Challenger CH108A |
| 831622 | CTD or STD cast | 1993-11-21 22:05:00 | 53.55067 N, 0.116 E | RRS Challenger CH108A |
| 831634 | CTD or STD cast | 1993-11-21 22:32:00 | 53.55017 N, 0.11633 E | RRS Challenger CH108A |
| 1285358 | Water sample data | 1993-11-21 22:34:00 | 53.55017 N, 0.11633 E | RRS Challenger CH108A |
| 831646 | CTD or STD cast | 1993-11-21 23:01:00 | 53.55033 N, 0.1165 E | RRS Challenger CH108A |
| 831658 | CTD or STD cast | 1993-11-21 23:31:00 | 53.55017 N, 0.11583 E | RRS Challenger CH108A |
| 1285371 | Water sample data | 1993-11-21 23:33:00 | 53.55009 N, 0.11577 E | RRS Challenger CH108A |
| 831671 | CTD or STD cast | 1993-11-22 00:05:00 | 53.54967 N, 0.118 E | RRS Challenger CH108A |
| 831751 | CTD or STD cast | 1993-11-22 00:34:00 | 53.55 N, 0.11833 E | RRS Challenger CH108A |
| 1285383 | Water sample data | 1993-11-22 00:37:00 | 53.54994 N, 0.11835 E | RRS Challenger CH108A |
| 831763 | CTD or STD cast | 1993-11-22 01:06:00 | 53.55017 N, 0.11867 E | RRS Challenger CH108A |
| 831775 | CTD or STD cast | 1993-11-22 01:32:00 | 53.5495 N, 0.1185 E | RRS Challenger CH108A |
| 1285395 | Water sample data | 1993-11-22 01:34:00 | 53.54948 N, 0.11855 E | RRS Challenger CH108A |
| 831787 | CTD or STD cast | 1993-11-22 02:03:00 | 53.55017 N, 0.11867 E | RRS Challenger CH108A |
| 831799 | CTD or STD cast | 1993-11-22 02:33:00 | 53.54983 N, 0.119 E | RRS Challenger CH108A |
| 1285402 | Water sample data | 1993-11-22 02:35:00 | 53.54989 N, 0.11893 E | RRS Challenger CH108A |
| 831806 | CTD or STD cast | 1993-11-22 03:02:00 | 53.54983 N, 0.11933 E | RRS Challenger CH108A |
| 831818 | CTD or STD cast | 1993-11-22 03:34:00 | 53.55017 N, 0.11883 E | RRS Challenger CH108A |
| 831831 | CTD or STD cast | 1993-11-22 04:02:00 | 53.55017 N, 0.119 E | RRS Challenger CH108A |
| 831843 | CTD or STD cast | 1993-11-22 04:32:00 | 53.55017 N, 0.119 E | RRS Challenger CH108A |
| 1285414 | Water sample data | 1993-11-22 04:34:00 | 53.55009 N, 0.11906 E | RRS Challenger CH108A |
| 831683 | CTD or STD cast | 1993-11-22 05:01:00 | 53.54983 N, 0.11883 E | RRS Challenger CH108A |
| 831855 | CTD or STD cast | 1993-11-22 05:32:00 | 53.54967 N, 0.11867 E | RRS Challenger CH108A |
| 1285426 | Water sample data | 1993-11-22 05:33:00 | 53.54972 N, 0.11869 E | RRS Challenger CH108A |
| 831867 | CTD or STD cast | 1993-11-22 06:02:00 | 53.5495 N, 0.11867 E | RRS Challenger CH108A |
| 831695 | CTD or STD cast | 1993-11-22 06:31:00 | 53.54983 N, 0.11867 E | RRS Challenger CH108A |
| 1285438 | Water sample data | 1993-11-22 06:33:00 | 53.54983 N, 0.11865 E | RRS Challenger CH108A |
| 831879 | CTD or STD cast | 1993-11-22 07:01:00 | 53.54967 N, 0.1185 E | RRS Challenger CH108A |
| 832613 | CTD or STD cast | 1993-12-11 17:46:00 | 53.54583 N, 0.15417 E | RRS Challenger CH108C |
| 832625 | CTD or STD cast | 1993-12-11 19:08:00 | 53.54533 N, 0.13817 E | RRS Challenger CH108C |
| 832637 | CTD or STD cast | 1993-12-11 20:58:00 | 53.493 N, 0.39917 E | RRS Challenger CH108C |
| 832883 | CTD or STD cast | 1993-12-12 05:14:00 | 53.64167 N, 0.9685 E | RRS Challenger CH108C |
| 832649 | CTD or STD cast | 1993-12-12 06:47:00 | 53.7685 N, 0.83433 E | RRS Challenger CH108C |
| 832650 | CTD or STD cast | 1993-12-12 20:42:00 | 53.533 N, 0.53867 E | RRS Challenger CH108C |
| 832662 | CTD or STD cast | 1993-12-12 22:36:00 | 53.38567 N, 0.6395 E | RRS Challenger CH108C |
| 832686 | CTD or STD cast | 1993-12-13 01:04:00 | 53.48117 N, 0.39333 E | RRS Challenger CH108C |
| 832698 | CTD or STD cast | 1993-12-13 02:56:00 | 53.5565 N, 0.67217 E | RRS Challenger CH108C |
| 832705 | CTD or STD cast | 1993-12-13 04:10:00 | 53.41117 N, 0.7695 E | RRS Challenger CH108C |
| 832717 | CTD or STD cast | 1993-12-13 06:56:00 | 53.603 N, 0.38217 E | RRS Challenger CH108C |
| 832822 | CTD or STD cast | 1993-12-18 21:18:00 | 53.33883 N, 0.4895 E | RRS Challenger CH108C |
| 832834 | CTD or STD cast | 1993-12-19 00:16:00 | 53.00133 N, 0.40267 E | RRS Challenger CH108C |
| 832846 | CTD or STD cast | 1993-12-19 02:03:00 | 53.24983 N, 0.6455 E | RRS Challenger CH108C |
| 832601 | CTD or STD cast | 1993-12-19 05:22:00 | 52.9985 N, 1.05917 E | RRS Challenger CH108C |
| 832858 | CTD or STD cast | 1993-12-19 07:39:00 | 52.89867 N, 1.51133 E | RRS Challenger CH108C |
| 832871 | CTD or STD cast | 1993-12-19 09:25:00 | 52.71433 N, 1.81933 E | RRS Challenger CH108C |
| 834748 | CTD or STD cast | 1994-10-10 10:35:00 | 53.5515 N, 0.1295 E | RRS Challenger CH115A |
| 2254880 | Water sample data | 1994-10-10 10:38:00 | 53.55153 N, 0.12955 E | RRS Challenger CH115A |
| 2261329 | Water sample data | 1994-10-10 10:38:00 | 53.55153 N, 0.12955 E | RRS Challenger CH115A |
| 833690 | CTD or STD cast | 1994-10-10 13:58:00 | 53.77183 N, 0.8365 E | RRS Challenger CH115A |
| 2249933 | Water sample data | 1994-10-10 13:59:00 | 53.77175 N, 0.83649 E | RRS Challenger CH115A |
| 2254892 | Water sample data | 1994-10-10 13:59:00 | 53.77175 N, 0.83649 E | RRS Challenger CH115A |
| 2261330 | Water sample data | 1994-10-10 13:59:00 | 53.77175 N, 0.83649 E | RRS Challenger CH115A |
| 833708 | CTD or STD cast | 1994-10-10 15:21:00 | 53.65267 N, 0.965 E | RRS Challenger CH115A |
| 2249945 | Water sample data | 1994-10-10 15:23:30 | 53.65274 N, 0.96506 E | RRS Challenger CH115A |
| 2254911 | Water sample data | 1994-10-10 15:23:30 | 53.65274 N, 0.96506 E | RRS Challenger CH115A |
| 2261342 | Water sample data | 1994-10-10 15:23:30 | 53.65274 N, 0.96506 E | RRS Challenger CH115A |
| 834761 | CTD or STD cast | 1994-10-10 17:56:00 | 53.48117 N, 0.40033 E | RRS Challenger CH115A |
| 2249957 | Water sample data | 1994-10-10 17:57:30 | 53.48124 N, 0.40036 E | RRS Challenger CH115A |
| 2254923 | Water sample data | 1994-10-10 17:57:30 | 53.48124 N, 0.40036 E | RRS Challenger CH115A |
| 2261354 | Water sample data | 1994-10-10 17:57:30 | 53.48124 N, 0.40036 E | RRS Challenger CH115A |
| 833721 | CTD or STD cast | 1994-10-10 19:04:00 | 53.3095 N, 0.35283 E | RRS Challenger CH115A |
| 2249969 | Water sample data | 1994-10-10 19:06:00 | 53.3095 N, 0.35287 E | RRS Challenger CH115A |
| 2254935 | Water sample data | 1994-10-10 19:06:00 | 53.3095 N, 0.35287 E | RRS Challenger CH115A |
| 2261366 | Water sample data | 1994-10-10 19:06:00 | 53.3095 N, 0.35287 E | RRS Challenger CH115A |
| 835125 | CTD or STD cast | 1994-10-10 20:57:00 | 53.4145 N, 0.76683 E | RRS Challenger CH115A |
| 2249970 | Water sample data | 1994-10-10 21:00:51 | 53.41449 N, 0.76682 E | RRS Challenger CH115A |
| 2254947 | Water sample data | 1994-10-10 21:00:51 | 53.41449 N, 0.76682 E | RRS Challenger CH115A |
| 2261378 | Water sample data | 1994-10-10 21:00:51 | 53.41449 N, 0.76682 E | RRS Challenger CH115A |
| 833733 | CTD or STD cast | 1994-10-10 22:12:00 | 53.25117 N, 0.65083 E | RRS Challenger CH115A |
| 2249982 | Water sample data | 1994-10-10 22:14:30 | 53.25118 N, 0.65087 E | RRS Challenger CH115A |
| 2254959 | Water sample data | 1994-10-10 22:14:30 | 53.25118 N, 0.65087 E | RRS Challenger CH115A |
| 2261391 | Water sample data | 1994-10-10 22:14:30 | 53.25118 N, 0.65087 E | RRS Challenger CH115A |
| 834773 | CTD or STD cast | 1994-10-11 00:21:00 | 53.00167 N, 0.4025 E | RRS Challenger CH115A |
| 2249994 | Water sample data | 1994-10-11 00:22:00 | 53.0017 N, 0.40252 E | RRS Challenger CH115A |
| 2254960 | Water sample data | 1994-10-11 00:22:00 | 53.0017 N, 0.40252 E | RRS Challenger CH115A |
| 2261409 | Water sample data | 1994-10-11 00:22:00 | 53.0017 N, 0.40252 E | RRS Challenger CH115A |
| 833745 | CTD or STD cast | 1994-10-11 02:08:00 | 53.25533 N, 0.65067 E | RRS Challenger CH115A |
| 2250006 | Water sample data | 1994-10-11 02:09:00 | 53.25538 N, 0.65073 E | RRS Challenger CH115A |
| 2254972 | Water sample data | 1994-10-11 02:09:00 | 53.25538 N, 0.65073 E | RRS Challenger CH115A |
| 2261410 | Water sample data | 1994-10-11 02:09:00 | 53.25538 N, 0.65073 E | RRS Challenger CH115A |
| 833769 | CTD or STD cast | 1994-10-11 05:40:00 | 53.00133 N, 1.06 E | RRS Challenger CH115A |
| 2250031 | Water sample data | 1994-10-11 05:43:00 | 53.00129 N, 1.06003 E | RRS Challenger CH115A |
| 2254996 | Water sample data | 1994-10-11 05:43:00 | 53.00129 N, 1.06003 E | RRS Challenger CH115A |
| 2261434 | Water sample data | 1994-10-11 05:43:00 | 53.00129 N, 1.06003 E | RRS Challenger CH115A |
| 834785 | CTD or STD cast | 1994-10-11 08:15:00 | 53.29167 N, 1.3485 E | RRS Challenger CH115A |
| 2250043 | Water sample data | 1994-10-11 08:16:30 | 53.29169 N, 1.34857 E | RRS Challenger CH115A |
| 2255011 | Water sample data | 1994-10-11 08:16:30 | 53.29169 N, 1.34857 E | RRS Challenger CH115A |
| 2261446 | Water sample data | 1994-10-11 08:16:30 | 53.29169 N, 1.34857 E | RRS Challenger CH115A |
| 833770 | CTD or STD cast | 1994-10-11 10:41:00 | 52.901 N, 1.51967 E | RRS Challenger CH115A |
| 2250055 | Water sample data | 1994-10-11 10:42:00 | 52.90099 N, 1.5196 E | RRS Challenger CH115A |
| 2255023 | Water sample data | 1994-10-11 10:42:00 | 52.90099 N, 1.5196 E | RRS Challenger CH115A |
| 2261458 | Water sample data | 1994-10-11 10:42:00 | 52.90099 N, 1.5196 E | RRS Challenger CH115A |
| 833782 | CTD or STD cast | 1994-10-11 12:09:00 | 52.71133 N, 1.82033 E | RRS Challenger CH115A |
| 2250067 | Water sample data | 1994-10-11 12:11:00 | 52.71136 N, 1.82038 E | RRS Challenger CH115A |
| 2255035 | Water sample data | 1994-10-11 12:11:00 | 52.71136 N, 1.82038 E | RRS Challenger CH115A |
| 2261471 | Water sample data | 1994-10-11 12:11:00 | 52.71136 N, 1.82038 E | RRS Challenger CH115A |
| 834797 | CTD or STD cast | 1994-10-11 13:52:00 | 52.77917 N, 2.20267 E | RRS Challenger CH115A |
| 2250079 | Water sample data | 1994-10-11 13:54:00 | 52.77922 N, 2.20261 E | RRS Challenger CH115A |
| 2255047 | Water sample data | 1994-10-11 13:54:00 | 52.77922 N, 2.20261 E | RRS Challenger CH115A |
| 2261483 | Water sample data | 1994-10-11 13:54:00 | 52.77922 N, 2.20261 E | RRS Challenger CH115A |
| 833794 | CTD or STD cast | 1994-10-11 18:13:00 | 53.2925 N, 1.34783 E | RRS Challenger CH115A |
| 2250080 | Water sample data | 1994-10-11 18:15:00 | 53.29258 N, 1.34786 E | RRS Challenger CH115A |
| 2255059 | Water sample data | 1994-10-11 18:15:00 | 53.29258 N, 1.34786 E | RRS Challenger CH115A |
| 2261495 | Water sample data | 1994-10-11 18:15:00 | 53.29258 N, 1.34786 E | RRS Challenger CH115A |
| 2250092 | Water sample data | 1994-10-11 22:26:30 | 53.64941 N, 0.96708 E | RRS Challenger CH115A |
| 2255060 | Water sample data | 1994-10-11 22:26:30 | 53.64941 N, 0.96708 E | RRS Challenger CH115A |
| 2261502 | Water sample data | 1994-10-11 22:26:30 | 53.64941 N, 0.96708 E | RRS Challenger CH115A |
| 833801 | CTD or STD cast | 1994-10-11 22:27:00 | 53.64933 N, 0.967 E | RRS Challenger CH115A |
| 833813 | CTD or STD cast | 1994-10-12 00:11:00 | 53.76783 N, 0.8295 E | RRS Challenger CH115A |
| 2250111 | Water sample data | 1994-10-12 00:13:00 | 53.76775 N, 0.82945 E | RRS Challenger CH115A |
| 2255072 | Water sample data | 1994-10-12 00:13:00 | 53.76775 N, 0.82945 E | RRS Challenger CH115A |
| 2261514 | Water sample data | 1994-10-12 00:13:00 | 53.76775 N, 0.82945 E | RRS Challenger CH115A |
| 834804 | CTD or STD cast | 1994-10-12 01:49:00 | 53.89383 N, 0.68017 E | RRS Challenger CH115A |
| 2250123 | Water sample data | 1994-10-12 01:54:00 | 53.89386 N, 0.68016 E | RRS Challenger CH115A |
| 2255084 | Water sample data | 1994-10-12 01:54:00 | 53.89386 N, 0.68016 E | RRS Challenger CH115A |
| 2261526 | Water sample data | 1994-10-12 01:54:00 | 53.89386 N, 0.68016 E | RRS Challenger CH115A |
| 833837 | CTD or STD cast | 1994-10-12 06:26:00 | 53.72367 N, 0.133 E | RRS Challenger CH115A |
| 2250159 | Water sample data | 1994-10-12 06:29:00 | 53.72366 N, 0.13301 E | RRS Challenger CH115A |
| 2255115 | Water sample data | 1994-10-12 06:29:00 | 53.72366 N, 0.13301 E | RRS Challenger CH115A |
| 2261563 | Water sample data | 1994-10-12 06:29:00 | 53.72366 N, 0.13301 E | RRS Challenger CH115A |
| 834816 | CTD or STD cast | 1994-10-12 08:40:00 | 53.85817 N, 0.03083 W | RRS Challenger CH115A |
| 2250160 | Water sample data | 1994-10-12 08:42:30 | 53.85819 N, 0.03082 W | RRS Challenger CH115A |
| 2255127 | Water sample data | 1994-10-12 08:42:30 | 53.85819 N, 0.03082 W | RRS Challenger CH115A |
| 2261575 | Water sample data | 1994-10-12 08:42:30 | 53.85819 N, 0.03082 W | RRS Challenger CH115A |
| 833849 | CTD or STD cast | 1994-10-12 12:33:00 | 54.032 N, 0.51683 E | RRS Challenger CH115A |
| 833850 | CTD or STD cast | 1994-10-12 12:37:00 | 54.03183 N, 0.5165 E | RRS Challenger CH115A |
| 833862 | CTD or STD cast | 1994-10-12 12:42:00 | 54.03133 N, 0.51617 E | RRS Challenger CH115A |
| 834828 | CTD or STD cast | 1994-10-12 12:46:00 | 54.03083 N, 0.5155 E | RRS Challenger CH115A |
| 833874 | CTD or STD cast | 1994-10-12 12:50:00 | 54.03067 N, 0.5155 E | RRS Challenger CH115A |
| 833886 | CTD or STD cast | 1994-10-12 12:54:00 | 54.0305 N, 0.5155 E | RRS Challenger CH115A |
| 833898 | CTD or STD cast | 1994-10-12 12:58:00 | 54.03 N, 0.515 E | RRS Challenger CH115A |
| 834841 | CTD or STD cast | 1994-10-12 13:02:00 | 54.02983 N, 0.51467 E | RRS Challenger CH115A |
| 833905 | CTD or STD cast | 1994-10-12 13:06:00 | 54.02967 N, 0.51433 E | RRS Challenger CH115A |
| 834447 | CTD or STD cast | 1994-10-12 13:10:00 | 54.02967 N, 0.51417 E | RRS Challenger CH115A |
| 833917 | CTD or STD cast | 1994-10-12 13:14:00 | 54.0295 N, 0.51383 E | RRS Challenger CH115A |
| 834620 | CTD or STD cast | 1994-10-12 13:18:00 | 54.0295 N, 0.51367 E | RRS Challenger CH115A |
| 833419 | CTD or STD cast | 1994-10-12 13:22:00 | 54.02933 N, 0.513 E | RRS Challenger CH115A |
| 833420 | CTD or STD cast | 1994-10-12 13:26:00 | 54.02983 N, 0.51217 E | RRS Challenger CH115A |
| 834632 | CTD or STD cast | 1994-10-12 13:30:00 | 54.02983 N, 0.5125 E | RRS Challenger CH115A |
| 833432 | CTD or STD cast | 1994-10-12 13:34:00 | 54.03 N, 0.512 E | RRS Challenger CH115A |
| 2250172 | Water sample data | 1994-10-12 13:36:30 | 54.03005 N, 0.51198 E | RRS Challenger CH115A |
| 2255139 | Water sample data | 1994-10-12 13:36:30 | 54.03005 N, 0.51198 E | RRS Challenger CH115A |
| 2261587 | Water sample data | 1994-10-12 13:36:30 | 54.03005 N, 0.51198 E | RRS Challenger CH115A |
| 833179 | CTD or STD cast | 1994-10-15 12:36:00 | 54.0315 N, 0.51233 E | RRS Challenger CH115A |
| 2250565 | Water sample data | 1994-10-15 12:38:00 | 54.03145 N, 0.51237 E | RRS Challenger CH115A |
| 2255533 | Water sample data | 1994-10-15 12:38:00 | 54.03145 N, 0.51237 E | RRS Challenger CH115A |
| 2261944 | Water sample data | 1994-10-15 12:38:00 | 54.03145 N, 0.51237 E | RRS Challenger CH115A |
| 833180 | CTD or STD cast | 1994-10-15 15:29:00 | 53.85783 N, 0.033 W | RRS Challenger CH115A |
| 2250577 | Water sample data | 1994-10-15 15:30:30 | 53.85791 N, 0.03298 W | RRS Challenger CH115A |
| 2255545 | Water sample data | 1994-10-15 15:30:30 | 53.85791 N, 0.03298 W | RRS Challenger CH115A |
| 2261956 | Water sample data | 1994-10-15 15:30:30 | 53.85791 N, 0.03298 W | RRS Challenger CH115A |
| 833192 | CTD or STD cast | 1994-10-15 16:50:00 | 53.72567 N, 0.1315 E | RRS Challenger CH115A |
| 2250589 | Water sample data | 1994-10-15 16:51:00 | 53.72571 N, 0.13143 E | RRS Challenger CH115A |
| 2255557 | Water sample data | 1994-10-15 16:51:00 | 53.72571 N, 0.13143 E | RRS Challenger CH115A |
| 2261968 | Water sample data | 1994-10-15 16:51:00 | 53.72571 N, 0.13143 E | RRS Challenger CH115A |
| 833211 | CTD or STD cast | 1994-10-15 19:49:00 | 53.7715 N, 0.8305 E | RRS Challenger CH115A |
| 2255569 | Water sample data | 1994-10-15 19:50:30 | 53.77142 N, 0.8305 E | RRS Challenger CH115A |
| 2261981 | Water sample data | 1994-10-15 19:50:30 | 53.77142 N, 0.8305 E | RRS Challenger CH115A |
| 833223 | CTD or STD cast | 1994-10-15 21:15:00 | 53.6505 N, 0.96517 E | RRS Challenger CH115A |
| 2255570 | Water sample data | 1994-10-15 21:17:30 | 53.65051 N, 0.96516 E | RRS Challenger CH115A |
| 2261993 | Water sample data | 1994-10-15 21:17:30 | 53.65051 N, 0.96516 E | RRS Challenger CH115A |
| 833235 | CTD or STD cast | 1994-10-16 00:17:00 | 53.29317 N, 1.34917 E | RRS Challenger CH115A |
| 2250590 | Water sample data | 1994-10-16 00:18:30 | 53.29322 N, 1.34911 E | RRS Challenger CH115A |
| 2255582 | Water sample data | 1994-10-16 00:18:30 | 53.29322 N, 1.34911 E | RRS Challenger CH115A |
| 2262007 | Water sample data | 1994-10-16 00:18:30 | 53.29322 N, 1.34911 E | RRS Challenger CH115A |
| 833247 | CTD or STD cast | 1994-10-16 02:39:00 | 52.99933 N, 1.07 E | RRS Challenger CH115A |
| 2250608 | Water sample data | 1994-10-16 02:41:00 | 52.99928 N, 1.07005 E | RRS Challenger CH115A |
| 2255594 | Water sample data | 1994-10-16 02:41:00 | 52.99928 N, 1.07005 E | RRS Challenger CH115A |
| 2262019 | Water sample data | 1994-10-16 02:41:00 | 52.99928 N, 1.07005 E | RRS Challenger CH115A |
| 833259 | CTD or STD cast | 1994-10-16 04:30:00 | 53.14967 N, 0.86817 E | RRS Challenger CH115A |
| 2250621 | Water sample data | 1994-10-16 04:33:30 | 53.14959 N, 0.86812 E | RRS Challenger CH115A |
| 2255601 | Water sample data | 1994-10-16 04:33:30 | 53.14959 N, 0.86812 E | RRS Challenger CH115A |
| 2262020 | Water sample data | 1994-10-16 04:33:30 | 53.14959 N, 0.86812 E | RRS Challenger CH115A |
| 833260 | CTD or STD cast | 1994-10-16 08:14:00 | 53.001 N, 0.39983 E | RRS Challenger CH115A |
| 2250633 | Water sample data | 1994-10-16 08:15:00 | 53.00108 N, 0.39979 E | RRS Challenger CH115A |
| 2255613 | Water sample data | 1994-10-16 08:15:00 | 53.00108 N, 0.39979 E | RRS Challenger CH115A |
| 2262032 | Water sample data | 1994-10-16 08:15:00 | 53.00108 N, 0.39979 E | RRS Challenger CH115A |
| 833272 | CTD or STD cast | 1994-10-16 10:07:00 | 53.25217 N, 0.64883 E | RRS Challenger CH115A |
| 2250645 | Water sample data | 1994-10-16 10:09:00 | 53.25225 N, 0.64885 E | RRS Challenger CH115A |
| 2255637 | Water sample data | 1994-10-16 10:09:00 | 53.25225 N, 0.64885 E | RRS Challenger CH115A |
| 2262056 | Water sample data | 1994-10-16 10:09:00 | 53.25225 N, 0.64885 E | RRS Challenger CH115A |
| 833284 | CTD or STD cast | 1994-10-16 11:28:00 | 53.418 N, 0.76317 E | RRS Challenger CH115A |
| 2255649 | Water sample data | 1994-10-16 11:30:30 | 53.41792 N, 0.76318 E | RRS Challenger CH115A |
| 2262068 | Water sample data | 1994-10-16 11:30:30 | 53.41792 N, 0.76318 E | RRS Challenger CH115A |
| 834552 | CTD or STD cast | 1994-10-16 13:18:00 | 53.30733 N, 0.352 E | RRS Challenger CH115A |
| 2255650 | Water sample data | 1994-10-16 13:20:00 | 53.30726 N, 0.35199 E | RRS Challenger CH115A |
| 2262081 | Water sample data | 1994-10-16 13:20:00 | 53.30726 N, 0.35199 E | RRS Challenger CH115A |
| 833296 | CTD or STD cast | 1994-10-16 15:03:00 | 53.48067 N, 0.39867 E | RRS Challenger CH115A |
| 2255662 | Water sample data | 1994-10-16 15:05:30 | 53.48067 N, 0.39859 E | RRS Challenger CH115A |
| 2262093 | Water sample data | 1994-10-16 15:05:30 | 53.48067 N, 0.39859 E | RRS Challenger CH115A |
| 833303 | CTD or STD cast | 1994-10-16 16:24:00 | 53.55083 N, 0.13283 E | RRS Challenger CH115A |
| 2255674 | Water sample data | 1994-10-16 16:26:00 | 53.55088 N, 0.13288 E | RRS Challenger CH115A |
| 836546 | CTD or STD cast | 1994-11-04 08:05:00 | 53.54967 N, 0.136 E | RRS Challenger CH115C |
| 836313 | CTD or STD cast | 1994-11-04 09:02:00 | 53.54983 N, 0.1365 E | RRS Challenger CH115C |
| 836325 | CTD or STD cast | 1994-11-04 10:02:00 | 53.5495 N, 0.1365 E | RRS Challenger CH115C |
| 836337 | CTD or STD cast | 1994-11-04 11:00:00 | 53.5495 N, 0.1365 E | RRS Challenger CH115C |
| 836755 | CTD or STD cast | 1994-11-04 12:00:00 | 53.54983 N, 0.13617 E | RRS Challenger CH115C |
| 836349 | CTD or STD cast | 1994-11-04 13:01:00 | 53.54917 N, 0.135 E | RRS Challenger CH115C |
| 836350 | CTD or STD cast | 1994-11-04 14:01:00 | 53.5495 N, 0.13333 E | RRS Challenger CH115C |
| 836558 | CTD or STD cast | 1994-11-04 15:00:00 | 53.54967 N, 0.13267 E | RRS Challenger CH115C |
| 836362 | CTD or STD cast | 1994-11-04 16:03:00 | 53.54967 N, 0.13233 E | RRS Challenger CH115C |
| 836374 | CTD or STD cast | 1994-11-04 17:06:00 | 53.54983 N, 0.13183 E | RRS Challenger CH115C |
| 836386 | CTD or STD cast | 1994-11-04 18:00:00 | 53.54967 N, 0.132 E | RRS Challenger CH115C |
| 836571 | CTD or STD cast | 1994-11-04 19:00:00 | 53.54983 N, 0.13333 E | RRS Challenger CH115C |
| 836398 | CTD or STD cast | 1994-11-04 20:03:00 | 53.5495 N, 0.13483 E | RRS Challenger CH115C |
| 836405 | CTD or STD cast | 1994-11-04 21:02:00 | 53.54983 N, 0.13567 E | RRS Challenger CH115C |
| 836583 | CTD or STD cast | 1994-11-04 22:02:00 | 53.54983 N, 0.136 E | RRS Challenger CH115C |
| 836417 | CTD or STD cast | 1994-11-04 23:01:00 | 53.55017 N, 0.13617 E | RRS Challenger CH115C |
| 836429 | CTD or STD cast | 1994-11-05 00:00:00 | 53.55017 N, 0.13633 E | RRS Challenger CH115C |
| 836430 | CTD or STD cast | 1994-11-05 01:02:00 | 53.54933 N, 0.13433 E | RRS Challenger CH115C |
| 836595 | CTD or STD cast | 1994-11-05 02:00:00 | 53.54983 N, 0.133 E | RRS Challenger CH115C |
| 836442 | CTD or STD cast | 1994-11-05 02:59:00 | 53.54983 N, 0.13217 E | RRS Challenger CH115C |
| 836454 | CTD or STD cast | 1994-11-05 03:59:00 | 53.54933 N, 0.13183 E | RRS Challenger CH115C |
| 836466 | CTD or STD cast | 1994-11-05 05:01:00 | 53.54967 N, 0.13167 E | RRS Challenger CH115C |
| 836602 | CTD or STD cast | 1994-11-05 06:02:00 | 53.54983 N, 0.13233 E | RRS Challenger CH115C |
| 836478 | CTD or STD cast | 1994-11-05 07:02:00 | 53.55017 N, 0.13233 E | RRS Challenger CH115C |
| 836718 | CTD or STD cast | 1994-11-05 07:58:00 | 53.54967 N, 0.135 E | RRS Challenger CH115C |
| 836614 | CTD or STD cast | 1994-11-05 15:07:00 | 53.2485 N, 0.64917 E | RRS Challenger CH115C |
| 835684 | CTD or STD cast | 1994-11-05 17:58:00 | 52.99933 N, 1.06767 E | RRS Challenger CH115C |
| 836000 | CTD or STD cast | 1994-11-05 20:38:00 | 53.291 N, 1.35283 E | RRS Challenger CH115C |
| 836012 | CTD or STD cast | 1994-11-05 23:52:00 | 53.6535 N, 0.9675 E | RRS Challenger CH115C |
| 836024 | CTD or STD cast | 1994-11-06 01:16:00 | 53.76733 N, 0.8385 E | RRS Challenger CH115C |
| 835696 | CTD or STD cast | 1994-11-06 02:43:00 | 53.8915 N, 0.68383 E | RRS Challenger CH115C |
| 836036 | CTD or STD cast | 1994-11-06 07:04:00 | 53.724 N, 0.135 E | RRS Challenger CH115C |
| 836048 | CTD or STD cast | 1994-11-06 08:00:00 | 53.725 N, 0.13517 E | RRS Challenger CH115C |
| 836638 | CTD or STD cast | 1994-11-06 08:59:00 | 53.72517 N, 0.13433 E | RRS Challenger CH115C |
| 836061 | CTD or STD cast | 1994-11-06 10:01:00 | 53.7255 N, 0.13367 E | RRS Challenger CH115C |
| 836073 | CTD or STD cast | 1994-11-06 11:00:00 | 53.72517 N, 0.13367 E | RRS Challenger CH115C |
| 836085 | CTD or STD cast | 1994-11-06 11:59:00 | 53.72517 N, 0.13417 E | RRS Challenger CH115C |
| 835703 | CTD or STD cast | 1994-11-06 13:01:00 | 53.72483 N, 0.13333 E | RRS Challenger CH115C |
| 836675 | CTD or STD cast | 1994-11-06 13:58:00 | 53.72517 N, 0.13383 E | RRS Challenger CH115C |
| 836687 | CTD or STD cast | 1994-11-06 15:02:00 | 53.72383 N, 0.135 E | RRS Challenger CH115C |
| 836651 | CTD or STD cast | 1994-11-06 15:59:00 | 53.72417 N, 0.13583 E | RRS Challenger CH115C |
| 836097 | CTD or STD cast | 1994-11-06 17:02:00 | 53.7245 N, 0.13567 E | RRS Challenger CH115C |
| 836104 | CTD or STD cast | 1994-11-06 18:02:00 | 53.72383 N, 0.1355 E | RRS Challenger CH115C |
| 835715 | CTD or STD cast | 1994-11-06 19:00:00 | 53.7245 N, 0.13533 E | RRS Challenger CH115C |
| 836116 | CTD or STD cast | 1994-11-06 20:01:00 | 53.72517 N, 0.134 E | RRS Challenger CH115C |
| 836699 | CTD or STD cast | 1994-11-06 20:59:00 | 53.72533 N, 0.1345 E | RRS Challenger CH115C |
| 836128 | CTD or STD cast | 1994-11-06 22:01:00 | 53.72533 N, 0.13433 E | RRS Challenger CH115C |
| 836663 | CTD or STD cast | 1994-11-06 22:59:00 | 53.72583 N, 0.13367 E | RRS Challenger CH115C |
| 836141 | CTD or STD cast | 1994-11-07 00:02:00 | 53.72583 N, 0.13333 E | RRS Challenger CH115C |
| 836153 | CTD or STD cast | 1994-11-07 00:59:00 | 53.72583 N, 0.13333 E | RRS Challenger CH115C |
| 836731 | CTD or STD cast | 1994-11-07 01:59:00 | 53.726 N, 0.13333 E | RRS Challenger CH115C |
| 836165 | CTD or STD cast | 1994-11-07 03:03:00 | 53.7245 N, 0.13433 E | RRS Challenger CH115C |
| 836177 | CTD or STD cast | 1994-11-07 04:01:00 | 53.7245 N, 0.13533 E | RRS Challenger CH115C |
| 836743 | CTD or STD cast | 1994-11-07 04:59:00 | 53.72467 N, 0.13533 E | RRS Challenger CH115C |
| 836189 | CTD or STD cast | 1994-11-07 19:16:00 | 53.48317 N, 0.40033 E | RRS Challenger CH115C |
| 836190 | CTD or STD cast | 1994-11-07 20:02:00 | 53.483 N, 0.4 E | RRS Challenger CH115C |
| 836208 | CTD or STD cast | 1994-11-07 21:03:00 | 53.48167 N, 0.401 E | RRS Challenger CH115C |
| 836491 | CTD or STD cast | 1994-11-07 22:02:00 | 53.48317 N, 0.4 E | RRS Challenger CH115C |
| 836221 | CTD or STD cast | 1994-11-07 23:00:00 | 53.48133 N, 0.40033 E | RRS Challenger CH115C |
| 836233 | CTD or STD cast | 1994-11-08 00:00:00 | 53.48017 N, 0.39983 E | RRS Challenger CH115C |
| 836509 | CTD or STD cast | 1994-11-08 01:02:00 | 53.48233 N, 0.404 E | RRS Challenger CH115C |
| 836245 | CTD or STD cast | 1994-11-08 02:03:00 | 53.481 N, 0.39867 E | RRS Challenger CH115C |
| 835579 | CTD or STD cast | 1994-11-08 03:00:00 | 53.48033 N, 0.39817 E | RRS Challenger CH115C |
| 835727 | CTD or STD cast | 1994-11-08 04:02:00 | 53.48583 N, 0.39867 E | RRS Challenger CH115C |
| 835739 | CTD or STD cast | 1994-11-08 05:01:00 | 53.48333 N, 0.3995 E | RRS Challenger CH115C |
| 835740 | CTD or STD cast | 1994-11-08 06:00:00 | 53.48333 N, 0.3995 E | RRS Challenger CH115C |
| 835580 | CTD or STD cast | 1994-11-08 20:23:00 | 53.39233 N, 0.78817 E | RRS Challenger CH115C |
| 835752 | CTD or STD cast | 1994-11-08 23:20:00 | 53.00617 N, 0.41467 E | RRS Challenger CH115C |
| 835764 | CTD or STD cast | 1994-11-09 13:44:00 | 53.85833 N, 0.03283 W | RRS Challenger CH115C |
| 835776 | CTD or STD cast | 1994-11-09 21:07:00 | 53.31083 N, 0.37317 E | RRS Challenger CH115C |
| 835788 | CTD or STD cast | 1994-11-10 07:02:00 | 54.0345 N, 0.51733 E | RRS Challenger CH115C |
| 835543 | CTD or STD cast | 1994-11-12 22:06:00 | 52.8985 N, 1.52033 E | RRS Challenger CH115C |
| 835555 | CTD or STD cast | 1994-11-13 00:31:00 | 52.71567 N, 1.8175 E | RRS Challenger CH115C |
| 835567 | CTD or STD cast | 1994-11-13 02:31:00 | 52.785 N, 2.20133 E | RRS Challenger CH115C |
| 838043 | CTD or STD cast | 1995-01-12 19:45:00 | 53.252 N, 0.6475 E | RRS Challenger CH117A0 |
| 2258611 | Water sample data | 1995-01-12 19:47:30 | 53.25208 N, 0.64752 E | RRS Challenger CH117A0 |
| 2260639 | Water sample data | 1995-01-12 19:47:30 | 53.25208 N, 0.64752 E | RRS Challenger CH117A0 |
| 1682826 | Water sample data | 1995-01-12 19:48:00 | 53.25208 N, 0.64752 E | RRS Challenger CH117A0 |
| 838055 | CTD or STD cast | 1995-01-12 22:03:00 | 53.39717 N, 0.78117 E | RRS Challenger CH117A0 |
| 1682838 | Water sample data | 1995-01-12 22:05:00 | 53.39715 N, 0.78109 E | RRS Challenger CH117A0 |
| 2258623 | Water sample data | 1995-01-12 22:05:00 | 53.39715 N, 0.78109 E | RRS Challenger CH117A0 |
| 2260640 | Water sample data | 1995-01-12 22:05:00 | 53.39715 N, 0.78109 E | RRS Challenger CH117A0 |
| 838067 | CTD or STD cast | 1995-01-13 01:05:00 | 53.64883 N, 0.966 E | RRS Challenger CH117A0 |
| 2258635 | Water sample data | 1995-01-13 01:05:30 | 53.64888 N, 0.96605 E | RRS Challenger CH117A0 |
| 2260652 | Water sample data | 1995-01-13 01:05:30 | 53.64888 N, 0.96605 E | RRS Challenger CH117A0 |
| 1682851 | Water sample data | 1995-01-13 01:06:00 | 53.64888 N, 0.96605 E | RRS Challenger CH117A0 |
| 838079 | CTD or STD cast | 1995-01-13 03:18:00 | 53.76683 N, 0.83467 E | RRS Challenger CH117A0 |
| 1682863 | Water sample data | 1995-01-13 03:19:00 | 53.76682 N, 0.83465 E | RRS Challenger CH117A0 |
| 2258647 | Water sample data | 1995-01-13 03:19:00 | 53.76682 N, 0.83465 E | RRS Challenger CH117A0 |
| 2260664 | Water sample data | 1995-01-13 03:19:00 | 53.76682 N, 0.83465 E | RRS Challenger CH117A0 |
| 837501 | CTD or STD cast | 1995-01-22 12:04:00 | 53.54733 N, 0.11567 E | RRS Challenger CH117A |
| 837513 | CTD or STD cast | 1995-01-22 13:00:00 | 53.54767 N, 0.1155 E | RRS Challenger CH117A |
| 837525 | CTD or STD cast | 1995-01-22 14:01:00 | 53.54717 N, 0.11567 E | RRS Challenger CH117A |
| 837181 | CTD or STD cast | 1995-01-22 14:59:00 | 53.54733 N, 0.11533 E | RRS Challenger CH117A |
| 837537 | CTD or STD cast | 1995-01-22 16:01:00 | 53.547 N, 0.11517 E | RRS Challenger CH117A |
| 837549 | CTD or STD cast | 1995-01-22 17:02:00 | 53.54733 N, 0.114 E | RRS Challenger CH117A |
| 836767 | CTD or STD cast | 1995-01-22 18:00:00 | 53.547 N, 0.1135 E | RRS Challenger CH117A |
| 837550 | CTD or STD cast | 1995-01-22 19:02:00 | 53.547 N, 0.11333 E | RRS Challenger CH117A |
| 837562 | CTD or STD cast | 1995-01-22 20:02:00 | 53.54733 N, 0.113 E | RRS Challenger CH117A |
| 837574 | CTD or STD cast | 1995-01-22 21:00:00 | 53.548 N, 0.11483 E | RRS Challenger CH117A |
| 836779 | CTD or STD cast | 1995-01-22 22:02:00 | 53.54867 N, 0.1155 E | RRS Challenger CH117A |
| 837586 | CTD or STD cast | 1995-01-22 23:02:00 | 53.54783 N, 0.11533 E | RRS Challenger CH117A |
| 837598 | CTD or STD cast | 1995-01-23 00:02:00 | 53.54717 N, 0.1155 E | RRS Challenger CH117A |
| 837605 | CTD or STD cast | 1995-01-23 01:00:00 | 53.547 N, 0.11583 E | RRS Challenger CH117A |
| 836780 | CTD or STD cast | 1995-01-23 02:01:00 | 53.54733 N, 0.11533 E | RRS Challenger CH117A |
| 837617 | CTD or STD cast | 1995-01-23 03:00:00 | 53.54733 N, 0.11633 E | RRS Challenger CH117A |
| 837629 | CTD or STD cast | 1995-01-23 04:01:00 | 53.54817 N, 0.11583 E | RRS Challenger CH117A |
| 837107 | CTD or STD cast | 1995-01-27 17:55:00 | 53.2545 N, 0.65433 E | RRS Challenger CH117A |
| 837273 | CTD or STD cast | 1995-01-27 20:40:00 | 53.00167 N, 0.39933 E | RRS Challenger CH117A |
| 837297 | CTD or STD cast | 1995-01-28 00:17:00 | 53.32167 N, 0.41017 E | RRS Challenger CH117A |
| 837119 | CTD or STD cast | 1995-01-28 02:21:00 | 53.4815 N, 0.3995 E | RRS Challenger CH117A |
| 837120 | CTD or STD cast | 1995-01-28 08:47:00 | 53.72583 N, 0.1415 E | RRS Challenger CH117A |
| 838227 | CTD or STD cast | 1995-02-04 17:28:00 | 52.722 N, 1.8135 E | RRS Challenger CH117B |
| 2257620 | Water sample data | 1995-02-04 17:31:00 | 52.72202 N, 1.81356 E | RRS Challenger CH117B |
| 2260627 | Water sample data | 1995-02-04 17:31:00 | 52.72202 N, 1.81356 E | RRS Challenger CH117B |
| 838160 | CTD or STD cast | 1995-02-04 18:57:00 | 52.899 N, 1.51483 E | RRS Challenger CH117B |
| 2257459 | Water sample data | 1995-02-04 19:00:00 | 52.89893 N, 1.51482 E | RRS Challenger CH117B |
| 2260443 | Water sample data | 1995-02-04 19:00:00 | 52.89893 N, 1.51482 E | RRS Challenger CH117B |
| 838172 | CTD or STD cast | 1995-02-04 21:37:00 | 53.2905 N, 1.353 E | RRS Challenger CH117B |
| 2257460 | Water sample data | 1995-02-04 21:39:30 | 53.29047 N, 1.35303 E | RRS Challenger CH117B |
| 2260455 | Water sample data | 1995-02-04 21:39:30 | 53.29047 N, 1.35303 E | RRS Challenger CH117B |
| 838264 | CTD or STD cast | 1995-02-05 20:09:00 | 53.4805 N, 1.005 E | RRS Challenger CH117B |
| 2257484 | Water sample data | 1995-02-05 20:11:00 | 53.48043 N, 1.00507 E | RRS Challenger CH117B |
| 2260479 | Water sample data | 1995-02-05 20:11:00 | 53.48043 N, 1.00507 E | RRS Challenger CH117B |
| 838276 | CTD or STD cast | 1995-02-05 23:52:00 | 53.89267 N, 0.689 E | RRS Challenger CH117B |
| 2257496 | Water sample data | 1995-02-05 23:57:30 | 53.8926 N, 0.689 E | RRS Challenger CH117B |
| 2260480 | Water sample data | 1995-02-05 23:57:30 | 53.8926 N, 0.689 E | RRS Challenger CH117B |
| 838184 | CTD or STD cast | 1995-02-06 01:07:00 | 54.0335 N, 0.51733 E | RRS Challenger CH117B |
| 2257503 | Water sample data | 1995-02-06 01:12:30 | 54.03344 N, 0.51733 E | RRS Challenger CH117B |
| 2260492 | Water sample data | 1995-02-06 01:12:30 | 54.03344 N, 0.51733 E | RRS Challenger CH117B |
| 838196 | CTD or STD cast | 1995-02-06 22:22:00 | 53.483 N, 0.40117 E | RRS Challenger CH117B |
| 2257527 | Water sample data | 1995-02-06 22:23:30 | 53.48296 N, 0.40121 E | RRS Challenger CH117B |
| 2260523 | Water sample data | 1995-02-06 22:23:30 | 53.48296 N, 0.40121 E | RRS Challenger CH117B |
| 838203 | CTD or STD cast | 1995-02-06 23:30:00 | 53.32033 N, 0.41767 E | RRS Challenger CH117B |
| 2260535 | Water sample data | 1995-02-06 23:33:00 | 53.32038 N, 0.4176 E | RRS Challenger CH117B |
| 838252 | CTD or STD cast | 1995-02-09 22:33:00 | 53.0025 N, 1.0635 E | RRS Challenger CH117B |
| 2257539 | Water sample data | 1995-02-09 22:40:30 | 53.00246 N, 1.06345 E | RRS Challenger CH117B |
| 2260547 | Water sample data | 1995-02-09 22:40:30 | 53.00246 N, 1.06345 E | RRS Challenger CH117B |
| 838750 | CTD or STD cast | 1995-04-01 20:06:00 | 52.78167 N, 2.201 E | RRS Challenger CH118A |
| 838762 | CTD or STD cast | 1995-04-01 22:04:00 | 52.71017 N, 1.815 E | RRS Challenger CH118A |
| 838774 | CTD or STD cast | 1995-04-02 07:21:00 | 53.24383 N, 0.65317 E | RRS Challenger CH118A |
| 838786 | CTD or STD cast | 1995-04-02 09:31:00 | 53.00167 N, 0.40333 E | RRS Challenger CH118A |
| 838737 | CTD or STD cast | 1995-04-02 12:12:00 | 53.4225 N, 0.76333 E | RRS Challenger CH118A |
| 838798 | CTD or STD cast | 1995-04-02 14:14:00 | 53.3085 N, 0.35983 E | RRS Challenger CH118A |
| 838805 | CTD or STD cast | 1995-04-02 15:43:00 | 53.47667 N, 0.39367 E | RRS Challenger CH118A |
| 838817 | CTD or STD cast | 1995-04-02 17:16:00 | 53.549 N, 0.13017 E | RRS Challenger CH118A |
| 838749 | CTD or STD cast | 1995-04-03 04:06:00 | 53.25183 N, 0.65583 E | RRS Challenger CH118A |
| 838829 | CTD or STD cast | 1995-04-03 11:47:00 | 53.00133 N, 1.07217 E | RRS Challenger CH118A |
| 838830 | CTD or STD cast | 1995-04-03 13:58:00 | 53.29433 N, 1.34583 E | RRS Challenger CH118A |
| 838424 | CTD or STD cast | 1995-04-03 22:42:00 | 52.90167 N, 1.51217 E | RRS Challenger CH118A |
| 838842 | CTD or STD cast | 1995-04-04 04:11:00 | 53.65583 N, 0.95883 E | RRS Challenger CH118A |
| 838854 | CTD or STD cast | 1995-04-04 05:19:00 | 53.76067 N, 0.83067 E | RRS Challenger CH118A |
| 838866 | CTD or STD cast | 1995-04-04 06:39:00 | 53.88733 N, 0.68667 E | RRS Challenger CH118A |
| 838436 | CTD or STD cast | 1995-04-04 08:08:00 | 54.03 N, 0.51567 E | RRS Challenger CH118A |
| 838878 | CTD or STD cast | 1995-04-04 10:37:00 | 53.86183 N, 0.03683 W | RRS Challenger CH118A |
| 838891 | CTD or STD cast | 1995-04-04 12:08:00 | 53.7285 N, 0.13333 E | RRS Challenger CH118A |
| 838448 | CTD or STD cast | 1995-04-05 04:05:00 | 53.85617 N, 0.03233 W | RRS Challenger CH118A |
| 838633 | CTD or STD cast | 1995-04-08 13:53:00 | 53.48633 N, 1.00283 E | RRS Challenger CH118A |
| 838645 | CTD or STD cast | 1995-04-08 16:18:00 | 53.26067 N, 0.651 E | RRS Challenger CH118A |
| 838657 | CTD or STD cast | 1995-04-08 22:39:00 | 53.001 N, 1.068 E | RRS Challenger CH118A |
| 838669 | CTD or STD cast | 1995-04-09 04:07:00 | 52.899 N, 1.51367 E | RRS Challenger CH118A |
| 838682 | CTD or STD cast | 1995-04-11 04:06:00 | 53.35967 N, 0.467 E | RRS Challenger CH118A |
| 838694 | CTD or STD cast | 1995-04-11 17:46:00 | 53.85983 N, 0.03367 W | RRS Challenger CH118A |
| 839685 | CTD or STD cast | 1995-04-14 15:53:00 | 53.54367 N, 0.1405 E | RRS Challenger CH118B |
| 839697 | CTD or STD cast | 1995-04-14 19:26:00 | 53.7665 N, 0.83717 E | RRS Challenger CH118B |
| 840300 | CTD or STD cast | 1995-04-14 21:10:00 | 53.65117 N, 0.96467 E | RRS Challenger CH118B |
| 839704 | CTD or STD cast | 1995-04-15 00:22:00 | 53.483 N, 0.40017 E | RRS Challenger CH118B |
| 840312 | CTD or STD cast | 1995-04-15 01:59:00 | 53.31817 N, 0.41 E | RRS Challenger CH118B |
| 839716 | CTD or STD cast | 1995-04-15 04:35:00 | 53.41017 N, 0.76233 E | RRS Challenger CH118B |
| 839728 | CTD or STD cast | 1995-04-15 06:13:00 | 53.48117 N, 0.9975 E | RRS Challenger CH118B |
| 839741 | CTD or STD cast | 1995-04-15 08:55:00 | 53.25067 N, 0.64533 E | RRS Challenger CH118B |
| 840324 | CTD or STD cast | 1995-04-15 11:59:00 | 53.001 N, 0.3985 E | RRS Challenger CH118B |
| 839753 | CTD or STD cast | 1995-04-15 16:39:00 | 53.0045 N, 1.0675 E | RRS Challenger CH118B |
| 840336 | CTD or STD cast | 1995-04-15 20:18:00 | 53.29333 N, 1.34583 E | RRS Challenger CH118B |
| 839765 | CTD or STD cast | 1995-04-15 23:33:00 | 52.90183 N, 1.508 E | RRS Challenger CH118B |
| 839777 | CTD or STD cast | 1995-04-16 02:38:00 | 52.72333 N, 1.81333 E | RRS Challenger CH118B |
| 839789 | CTD or STD cast | 1995-04-16 05:01:00 | 52.787 N, 2.198 E | RRS Challenger CH118B |
| 839790 | CTD or STD cast | 1995-04-16 11:12:00 | 53.30033 N, 1.3415 E | RRS Challenger CH118B |
| 839808 | CTD or STD cast | 1995-04-16 14:23:00 | 53.648 N, 0.96517 E | RRS Challenger CH118B |
| 839010 | CTD or STD cast | 1995-04-16 16:08:00 | 53.76117 N, 0.83533 E | RRS Challenger CH118B |
| 839593 | CTD or STD cast | 1995-04-16 18:10:00 | 53.89 N, 0.68383 E | RRS Challenger CH118B |
| 840219 | CTD or STD cast | 1995-04-16 20:04:00 | 54.03533 N, 0.515 E | RRS Challenger CH118B |
| 840220 | CTD or STD cast | 1995-04-16 23:20:00 | 53.86017 N, 0.03083 W | RRS Challenger CH118B |
| 839600 | CTD or STD cast | 1995-04-17 01:11:00 | 53.72567 N, 0.13467 E | RRS Challenger CH118B |
| 840232 | CTD or STD cast | 1995-04-17 04:04:00 | 53.88983 N, 0.681 E | RRS Challenger CH118B |
| 839612 | CTD or STD cast | 1995-04-17 09:39:00 | 53.56317 N, 0.07833 E | RRS Challenger CH118B |
| 839624 | CTD or STD cast | 1995-04-17 10:45:00 | 53.563 N, 0.07867 E | RRS Challenger CH118B |
| 840244 | CTD or STD cast | 1995-04-17 11:47:00 | 53.56317 N, 0.07883 E | RRS Challenger CH118B |
| 839255 | CTD or STD cast | 1995-04-17 12:45:00 | 53.563 N, 0.079 E | RRS Challenger CH118B |
| 839636 | CTD or STD cast | 1995-04-17 13:45:00 | 53.56367 N, 0.07917 E | RRS Challenger CH118B |
| 839648 | CTD or STD cast | 1995-04-17 14:46:00 | 53.56367 N, 0.0765 E | RRS Challenger CH118B |
| 840256 | CTD or STD cast | 1995-04-17 15:47:00 | 53.5635 N, 0.07683 E | RRS Challenger CH118B |
| 839661 | CTD or STD cast | 1995-04-17 16:49:00 | 53.56383 N, 0.07667 E | RRS Challenger CH118B |
| 840268 | CTD or STD cast | 1995-04-17 17:47:00 | 53.5635 N, 0.07633 E | RRS Challenger CH118B |
| 839673 | CTD or STD cast | 1995-04-17 18:45:00 | 53.5635 N, 0.07617 E | RRS Challenger CH118B |
| 840281 | CTD or STD cast | 1995-04-17 19:49:00 | 53.5635 N, 0.078 E | RRS Challenger CH118B |
| 840293 | CTD or STD cast | 1995-04-17 20:46:00 | 53.5635 N, 0.07833 E | RRS Challenger CH118B |
| 839267 | CTD or STD cast | 1995-04-17 21:45:00 | 53.563 N, 0.07833 E | RRS Challenger CH118B |
| 839950 | CTD or STD cast | 1995-04-17 22:44:00 | 53.56317 N, 0.07833 E | RRS Challenger CH118B |
| 840385 | CTD or STD cast | 1995-04-17 23:46:00 | 53.56333 N, 0.07867 E | RRS Challenger CH118B |
| 839962 | CTD or STD cast | 1995-04-18 00:46:00 | 53.56317 N, 0.07833 E | RRS Challenger CH118B |
| 839974 | CTD or STD cast | 1995-04-18 01:49:00 | 53.563 N, 0.07883 E | RRS Challenger CH118B |
| 839986 | CTD or STD cast | 1995-04-18 02:45:00 | 53.56383 N, 0.079 E | RRS Challenger CH118B |
| 839403 | CTD or STD cast | 1995-04-22 01:40:00 | 53.95033 N, 0.196 E | RRS Challenger CH118B |
| 840139 | CTD or STD cast | 1995-04-22 03:54:00 | 53.78083 N, 0.422 E | RRS Challenger CH118B |
| 839415 | CTD or STD cast | 1995-04-22 05:23:00 | 53.6595 N, 0.532 E | RRS Challenger CH118B |
| 839218 | CTD or STD cast | 1995-04-22 06:39:00 | 53.55883 N, 0.63267 E | RRS Challenger CH118B |
| 839427 | CTD or STD cast | 1995-04-22 07:58:00 | 53.41583 N, 0.76417 E | RRS Challenger CH118B |
| 839568 | CTD or STD cast | 1995-04-23 11:33:00 | 53.63633 N, 0.182 E | RRS Challenger CH118B |
| 839581 | CTD or STD cast | 1995-04-23 12:31:00 | 53.63733 N, 0.18067 E | RRS Challenger CH118B |
| 839279 | CTD or STD cast | 1995-04-23 13:30:00 | 53.6375 N, 0.18167 E | RRS Challenger CH118B |
| 839280 | CTD or STD cast | 1995-04-23 14:30:00 | 53.63767 N, 0.18183 E | RRS Challenger CH118B |
| 839071 | CTD or STD cast | 1995-04-23 15:31:00 | 53.63817 N, 0.182 E | RRS Challenger CH118B |
| 839292 | CTD or STD cast | 1995-04-23 16:30:00 | 53.63783 N, 0.182 E | RRS Challenger CH118B |
| 839311 | CTD or STD cast | 1995-04-23 17:32:00 | 53.63817 N, 0.182 E | RRS Challenger CH118B |
| 839323 | CTD or STD cast | 1995-04-23 18:30:00 | 53.63767 N, 0.1815 E | RRS Challenger CH118B |
| 839083 | CTD or STD cast | 1995-04-23 19:31:00 | 53.6375 N, 0.18133 E | RRS Challenger CH118B |
| 839206 | CTD or STD cast | 1995-04-23 20:31:00 | 53.6365 N, 0.18183 E | RRS Challenger CH118B |
| 839335 | CTD or STD cast | 1995-04-23 21:31:00 | 53.63617 N, 0.18217 E | RRS Challenger CH118B |
| 839347 | CTD or STD cast | 1995-04-23 22:31:00 | 53.63683 N, 0.18283 E | RRS Challenger CH118B |
| 839359 | CTD or STD cast | 1995-04-23 23:32:00 | 53.63617 N, 0.18267 E | RRS Challenger CH118B |
| 839058 | CTD or STD cast | 1995-04-24 00:33:00 | 53.63633 N, 0.18217 E | RRS Challenger CH118B |
| 839360 | CTD or STD cast | 1995-04-24 21:01:00 | 53.0 N, 0.39933 E | RRS Challenger CH118B |
| 839372 | CTD or STD cast | 1995-04-24 22:00:00 | 52.99967 N, 0.39917 E | RRS Challenger CH118B |
| 840103 | CTD or STD cast | 1995-04-24 23:02:00 | 52.99983 N, 0.399 E | RRS Challenger CH118B |
| 839095 | CTD or STD cast | 1995-04-25 00:03:00 | 53.0 N, 0.39883 E | RRS Challenger CH118B |
| 839102 | CTD or STD cast | 1995-04-25 01:02:00 | 53.0 N, 0.39917 E | RRS Challenger CH118B |
| 839114 | CTD or STD cast | 1995-04-25 02:02:00 | 53.0 N, 0.39917 E | RRS Challenger CH118B |
| 839126 | CTD or STD cast | 1995-04-25 03:01:00 | 53.0 N, 0.39883 E | RRS Challenger CH118B |
| 839138 | CTD or STD cast | 1995-04-25 04:01:00 | 53.0 N, 0.3985 E | RRS Challenger CH118B |
| 839151 | CTD or STD cast | 1995-04-25 05:03:00 | 53.00083 N, 0.39867 E | RRS Challenger CH118B |
| 839163 | CTD or STD cast | 1995-04-25 07:22:00 | 53.00233 N, 0.40017 E | RRS Challenger CH118B |
| 839175 | CTD or STD cast | 1995-04-25 08:21:00 | 52.99883 N, 0.3965 E | RRS Challenger CH118B |
| 839187 | CTD or STD cast | 1995-04-25 09:20:00 | 52.994 N, 0.39483 E | RRS Challenger CH118B |
| 839199 | CTD or STD cast | 1995-04-25 10:16:00 | 53.00167 N, 0.3985 E | RRS Challenger CH118B |
| 839046 | CTD or STD cast | 1995-04-25 11:19:00 | 52.99633 N, 0.39817 E | RRS Challenger CH118B |
| 840902 | CTD or STD cast | 1995-05-05 17:30:00 | 53.48383 N, 0.40033 E | RRS Challenger CH118C |
| 2248721 | Water sample data | 1995-05-05 17:31:30 | 53.48378 N, 0.40033 E | RRS Challenger CH118C |
| 2260824 | Water sample data | 1995-05-05 17:31:30 | 53.48378 N, 0.40033 E | RRS Challenger CH118C |
| 840914 | CTD or STD cast | 1995-05-05 18:42:00 | 53.32183 N, 0.40933 E | RRS Challenger CH118C |
| 2248733 | Water sample data | 1995-05-05 18:44:30 | 53.32176 N, 0.40932 E | RRS Challenger CH118C |
| 2260836 | Water sample data | 1995-05-05 18:44:30 | 53.32176 N, 0.40932 E | RRS Challenger CH118C |
| 840926 | CTD or STD cast | 1995-05-05 20:30:00 | 53.41567 N, 0.768 E | RRS Challenger CH118C |
| 2248745 | Water sample data | 1995-05-05 20:33:00 | 53.41567 N, 0.76797 E | RRS Challenger CH118C |
| 2260848 | Water sample data | 1995-05-05 20:33:00 | 53.41567 N, 0.76797 E | RRS Challenger CH118C |
| 840453 | CTD or STD cast | 1995-05-05 22:01:00 | 53.48233 N, 1.003 E | RRS Challenger CH118C |
| 2248757 | Water sample data | 1995-05-05 22:03:00 | 53.48234 N, 1.00305 E | RRS Challenger CH118C |
| 2260861 | Water sample data | 1995-05-05 22:03:00 | 53.48234 N, 1.00305 E | RRS Challenger CH118C |
| 840465 | CTD or STD cast | 1995-05-06 17:43:00 | 53.76717 N, 0.831 E | RRS Challenger CH118C |
| 2248794 | Water sample data | 1995-05-06 17:45:00 | 53.76718 N, 0.83095 E | RRS Challenger CH118C |
| 2257816 | Water sample data | 1995-05-06 17:45:00 | 53.76718 N, 0.83095 E | RRS Challenger CH118C |
| 2260904 | Water sample data | 1995-05-06 17:45:00 | 53.76718 N, 0.83095 E | RRS Challenger CH118C |
| 840963 | CTD or STD cast | 1995-05-06 18:48:00 | 53.6525 N, 0.96767 E | RRS Challenger CH118C |
| 2248801 | Water sample data | 1995-05-06 18:48:30 | 53.65258 N, 0.96759 E | RRS Challenger CH118C |
| 2257828 | Water sample data | 1995-05-06 18:48:30 | 53.65258 N, 0.96759 E | RRS Challenger CH118C |
| 2260916 | Water sample data | 1995-05-06 18:48:30 | 53.65258 N, 0.96759 E | RRS Challenger CH118C |
| 840975 | CTD or STD cast | 1995-05-06 21:34:00 | 53.29533 N, 1.34667 E | RRS Challenger CH118C |
| 2248813 | Water sample data | 1995-05-06 21:38:30 | 53.29525 N, 1.34664 E | RRS Challenger CH118C |
| 840477 | CTD or STD cast | 1995-05-07 14:15:00 | 52.781 N, 2.2035 E | RRS Challenger CH118C |
| 2248837 | Water sample data | 1995-05-07 14:16:00 | 52.78107 N, 2.20355 E | RRS Challenger CH118C |
| 2257853 | Water sample data | 1995-05-07 14:16:00 | 52.78107 N, 2.20355 E | RRS Challenger CH118C |
| 2260941 | Water sample data | 1995-05-07 14:16:00 | 52.78107 N, 2.20355 E | RRS Challenger CH118C |
| 840489 | CTD or STD cast | 1995-05-07 16:00:00 | 52.717 N, 1.81683 E | RRS Challenger CH118C |
| 2248849 | Water sample data | 1995-05-07 16:00:00 | 52.71708 N, 1.81676 E | RRS Challenger CH118C |
| 2257865 | Water sample data | 1995-05-07 16:00:00 | 52.71708 N, 1.81676 E | RRS Challenger CH118C |
| 2260953 | Water sample data | 1995-05-07 16:00:00 | 52.71708 N, 1.81676 E | RRS Challenger CH118C |
| 2248850 | Water sample data | 1995-05-07 17:31:00 | 52.89873 N, 1.51952 E | RRS Challenger CH118C |
| 2257877 | Water sample data | 1995-05-07 17:31:00 | 52.89873 N, 1.51952 E | RRS Challenger CH118C |
| 2260965 | Water sample data | 1995-05-07 17:31:00 | 52.89873 N, 1.51952 E | RRS Challenger CH118C |
| 840490 | CTD or STD cast | 1995-05-07 17:33:00 | 52.89867 N, 1.5195 E | RRS Challenger CH118C |
| 840508 | CTD or STD cast | 1995-05-07 19:52:00 | 53.29 N, 1.351 E | RRS Challenger CH118C |
| 2248862 | Water sample data | 1995-05-07 19:55:30 | 53.28999 N, 1.35095 E | RRS Challenger CH118C |
| 2257889 | Water sample data | 1995-05-07 19:55:30 | 53.28999 N, 1.35095 E | RRS Challenger CH118C |
| 2260977 | Water sample data | 1995-05-07 19:55:30 | 53.28999 N, 1.35095 E | RRS Challenger CH118C |
| 840521 | CTD or STD cast | 1995-05-07 22:07:00 | 53.00167 N, 1.07 E | RRS Challenger CH118C |
| 2248874 | Water sample data | 1995-05-07 22:07:00 | 53.00166 N, 1.07003 E | RRS Challenger CH118C |
| 2260989 | Water sample data | 1995-05-07 22:07:00 | 53.00166 N, 1.07003 E | RRS Challenger CH118C |
| 840533 | CTD or STD cast | 1995-05-08 15:44:00 | 53.00033 N, 0.4015 E | RRS Challenger CH118C |
| 2248898 | Water sample data | 1995-05-08 15:46:00 | 53.00041 N, 0.40153 E | RRS Challenger CH118C |
| 2257908 | Water sample data | 1995-05-08 15:46:00 | 53.00041 N, 0.40153 E | RRS Challenger CH118C |
| 2261004 | Water sample data | 1995-05-08 15:46:00 | 53.00041 N, 0.40153 E | RRS Challenger CH118C |
| 840545 | CTD or STD cast | 1995-05-08 17:28:00 | 53.23717 N, 0.6625 E | RRS Challenger CH118C |
| 2248905 | Water sample data | 1995-05-08 17:30:30 | 53.23716 N, 0.66255 E | RRS Challenger CH118C |
| 2261016 | Water sample data | 1995-05-08 17:30:30 | 53.23716 N, 0.66255 E | RRS Challenger CH118C |
| 840557 | CTD or STD cast | 1995-05-10 06:04:00 | 53.89267 N, 0.68083 E | RRS Challenger CH118C |
| 2248917 | Water sample data | 1995-05-10 06:06:30 | 53.89262 N, 0.68087 E | RRS Challenger CH118C |
| 2257921 | Water sample data | 1995-05-10 06:06:30 | 53.89262 N, 0.68087 E | RRS Challenger CH118C |
| 2261028 | Water sample data | 1995-05-10 06:06:30 | 53.89262 N, 0.68087 E | RRS Challenger CH118C |
| 840637 | CTD or STD cast | 1995-05-11 10:52:00 | 54.03317 N, 0.517 E | RRS Challenger CH118C |
| 2249017 | Water sample data | 1995-05-11 10:55:30 | 54.03309 N, 0.51695 E | RRS Challenger CH118C |
| 2257982 | Water sample data | 1995-05-11 10:55:30 | 54.03309 N, 0.51695 E | RRS Challenger CH118C |
| 2261133 | Water sample data | 1995-05-11 10:55:30 | 54.03309 N, 0.51695 E | RRS Challenger CH118C |
| 840649 | CTD or STD cast | 1995-05-11 13:29:00 | 53.86467 N, 0.00933 W | RRS Challenger CH118C |
| 2249029 | Water sample data | 1995-05-11 13:32:30 | 53.86462 N, 0.00937 W | RRS Challenger CH118C |
| 2257994 | Water sample data | 1995-05-11 13:32:30 | 53.86462 N, 0.00937 W | RRS Challenger CH118C |
| 2261145 | Water sample data | 1995-05-11 13:32:30 | 53.86462 N, 0.00937 W | RRS Challenger CH118C |
| 840650 | CTD or STD cast | 1995-05-11 14:38:00 | 53.72467 N, 0.13317 E | RRS Challenger CH118C |
| 2249030 | Water sample data | 1995-05-11 14:40:30 | 53.7247 N, 0.13313 E | RRS Challenger CH118C |
| 2258008 | Water sample data | 1995-05-11 14:40:30 | 53.7247 N, 0.13313 E | RRS Challenger CH118C |
| 2261157 | Water sample data | 1995-05-11 14:40:30 | 53.7247 N, 0.13313 E | RRS Challenger CH118C |
| 841432 | CTD or STD cast | 1995-06-01 10:15:00 | 53.54417 N, 0.15883 E | RRS Challenger CH119A |
| 841548 | CTD or STD cast | 1995-06-01 11:52:00 | 53.49067 N, 0.39967 E | RRS Challenger CH119A |
| 841561 | CTD or STD cast | 1995-06-01 14:06:00 | 53.32283 N, 0.4115 E | RRS Challenger CH119A |
| 841444 | CTD or STD cast | 1995-06-01 18:15:00 | 53.25467 N, 0.662 E | RRS Challenger CH119A |
| 841573 | CTD or STD cast | 1995-06-01 20:47:00 | 53.00067 N, 0.402 E | RRS Challenger CH119A |
| 841585 | CTD or STD cast | 1995-06-02 01:07:00 | 52.99883 N, 1.07 E | RRS Challenger CH119A |
| 841597 | CTD or STD cast | 1995-06-02 04:15:00 | 53.29217 N, 1.34683 E | RRS Challenger CH119A |
| 841604 | CTD or STD cast | 1995-06-02 07:19:00 | 52.89717 N, 1.52283 E | RRS Challenger CH119A |
| 841616 | CTD or STD cast | 1995-06-02 09:02:00 | 52.71017 N, 1.816 E | RRS Challenger CH119A |
| 841468 | CTD or STD cast | 1995-06-02 11:07:00 | 52.7715 N, 2.204 E | RRS Challenger CH119A |
| 841628 | CTD or STD cast | 1995-06-02 18:36:00 | 53.647 N, 0.96867 E | RRS Challenger CH119A |
| 841641 | CTD or STD cast | 1995-06-02 20:47:00 | 53.39483 N, 0.79217 E | RRS Challenger CH119A |
| 841481 | CTD or STD cast | 1995-06-02 22:21:00 | 53.47867 N, 1.00183 E | RRS Challenger CH119A |
| 841665 | CTD or STD cast | 1995-06-03 22:46:00 | 53.76483 N, 0.83183 E | RRS Challenger CH119A |
| 841677 | CTD or STD cast | 1995-06-04 00:03:00 | 53.88283 N, 0.69233 E | RRS Challenger CH119A |
| 841689 | CTD or STD cast | 1995-06-04 02:56:00 | 53.72617 N, 0.15367 E | RRS Challenger CH119A |
| 841500 | CTD or STD cast | 1995-06-05 09:37:00 | 53.3205 N, 0.41467 E | RRS Challenger CH119A |
| 841708 | CTD or STD cast | 1995-06-05 11:17:00 | 53.483 N, 0.40033 E | RRS Challenger CH119A |
| 841721 | CTD or STD cast | 1995-06-05 21:07:00 | 53.762 N, 0.83167 E | RRS Challenger CH119A |
| 841733 | CTD or STD cast | 1995-06-05 22:45:00 | 53.88667 N, 0.6865 E | RRS Challenger CH119A |
| 841512 | CTD or STD cast | 1995-06-06 00:31:00 | 54.032 N, 0.5175 E | RRS Challenger CH119A |
| 841745 | CTD or STD cast | 1995-06-06 03:39:00 | 53.8725 N, 0.0165 E | RRS Challenger CH119A |
| 841757 | CTD or STD cast | 1995-06-06 05:34:00 | 53.7255 N, 0.13017 E | RRS Challenger CH119A |
| 841769 | CTD or STD cast | 1995-06-06 21:15:00 | 53.4915 N, 0.42833 E | RRS Challenger CH119A |
| 841524 | CTD or STD cast | 1995-06-06 23:10:00 | 53.3205 N, 0.42033 E | RRS Challenger CH119A |
| 841770 | CTD or STD cast | 1995-06-07 00:58:00 | 53.2555 N, 0.65667 E | RRS Challenger CH119A |
| 842306 | CTD or STD cast | 1995-06-22 17:08:00 | 54.0345 N, 0.514 E | RRS Challenger CH119B |
| 2258149 | Water sample data | 1995-06-22 17:13:00 | 54.03449 N, 0.51392 E | RRS Challenger CH119B |
| 2258844 | Water sample data | 1995-06-22 17:13:00 | 54.03449 N, 0.51392 E | RRS Challenger CH119B |
| 842459 | CTD or STD cast | 1995-06-22 19:35:00 | 53.877 N, 0.024 E | RRS Challenger CH119B |
| 2258162 | Water sample data | 1995-06-22 19:38:00 | 53.87693 N, 0.02397 E | RRS Challenger CH119B |
| 2258868 | Water sample data | 1995-06-22 19:38:00 | 53.87693 N, 0.02397 E | RRS Challenger CH119B |
| 842331 | CTD or STD cast | 1995-06-22 20:51:00 | 53.723 N, 0.13517 E | RRS Challenger CH119B |
| 2258174 | Water sample data | 1995-06-22 20:54:00 | 53.72306 N, 0.13515 E | RRS Challenger CH119B |
| 2258881 | Water sample data | 1995-06-22 20:54:00 | 53.72306 N, 0.13515 E | RRS Challenger CH119B |
| 842251 | CTD or STD cast | 1995-06-23 18:14:00 | 53.65067 N, 0.96883 E | RRS Challenger CH119B |
| 2258924 | Water sample data | 1995-06-23 18:17:30 | 53.65071 N, 0.96885 E | RRS Challenger CH119B |
| 842263 | CTD or STD cast | 1995-06-23 21:15:00 | 53.295 N, 1.34767 E | RRS Challenger CH119B |
| 2258205 | Water sample data | 1995-06-23 21:18:00 | 53.29496 N, 1.34768 E | RRS Challenger CH119B |
| 2258936 | Water sample data | 1995-06-23 21:18:00 | 53.29496 N, 1.34768 E | RRS Challenger CH119B |
| 842287 | CTD or STD cast | 1995-06-24 11:56:00 | 52.787 N, 2.19383 E | RRS Challenger CH119B |
| 2258217 | Water sample data | 1995-06-24 11:59:30 | 52.78693 N, 2.19379 E | RRS Challenger CH119B |
| 2258961 | Water sample data | 1995-06-24 11:59:30 | 52.78693 N, 2.19379 E | RRS Challenger CH119B |
| 842447 | CTD or STD cast | 1995-06-24 13:37:00 | 52.71767 N, 1.81467 E | RRS Challenger CH119B |
| 2258229 | Water sample data | 1995-06-24 13:39:30 | 52.71763 N, 1.81469 E | RRS Challenger CH119B |
| 2258973 | Water sample data | 1995-06-24 13:39:30 | 52.71763 N, 1.81469 E | RRS Challenger CH119B |
| 842299 | CTD or STD cast | 1995-06-24 15:34:00 | 52.89683 N, 1.52133 E | RRS Challenger CH119B |
| 2258230 | Water sample data | 1995-06-24 15:37:30 | 52.8969 N, 1.5214 E | RRS Challenger CH119B |
| 2258985 | Water sample data | 1995-06-24 15:37:30 | 52.8969 N, 1.5214 E | RRS Challenger CH119B |
| 842202 | CTD or STD cast | 1995-06-25 16:16:00 | 52.9995 N, 0.39917 E | RRS Challenger CH119B |
| 2258254 | Water sample data | 1995-06-25 16:19:00 | 52.99957 N, 0.39914 E | RRS Challenger CH119B |
| 2259024 | Water sample data | 1995-06-25 16:19:00 | 52.99957 N, 0.39914 E | RRS Challenger CH119B |
| 842411 | CTD or STD cast | 1995-06-25 18:26:00 | 53.25067 N, 0.65217 E | RRS Challenger CH119B |
| 2258266 | Water sample data | 1995-06-25 18:26:30 | 53.25071 N, 0.65217 E | RRS Challenger CH119B |
| 2259036 | Water sample data | 1995-06-25 18:26:30 | 53.25071 N, 0.65217 E | RRS Challenger CH119B |
| 842214 | CTD or STD cast | 1995-06-25 19:45:00 | 53.39483 N, 0.78417 E | RRS Challenger CH119B |
| 2258278 | Water sample data | 1995-06-25 19:48:00 | 53.39476 N, 0.78412 E | RRS Challenger CH119B |
| 2259048 | Water sample data | 1995-06-25 19:48:00 | 53.39476 N, 0.78412 E | RRS Challenger CH119B |
| 842226 | CTD or STD cast | 1995-06-25 20:59:00 | 53.48433 N, 0.99983 E | RRS Challenger CH119B |
| 2258291 | Water sample data | 1995-06-25 21:01:00 | 53.48439 N, 0.99981 E | RRS Challenger CH119B |
| 2259061 | Water sample data | 1995-06-25 21:01:00 | 53.48439 N, 0.99981 E | RRS Challenger CH119B |
| 842423 | CTD or STD cast | 1995-06-25 23:40:00 | 53.3265 N, 0.4085 E | RRS Challenger CH119B |
| 2258309 | Water sample data | 1995-06-25 23:43:00 | 53.32654 N, 0.40858 E | RRS Challenger CH119B |
| 2259073 | Water sample data | 1995-06-25 23:43:00 | 53.32654 N, 0.40858 E | RRS Challenger CH119B |
| 842380 | CTD or STD cast | 1995-06-26 20:25:00 | 53.7685 N, 0.83617 E | RRS Challenger CH119B |
| 2258371 | Water sample data | 1995-06-26 20:27:30 | 53.76846 N, 0.83618 E | RRS Challenger CH119B |
| 2259189 | Water sample data | 1995-06-26 20:27:30 | 53.76846 N, 0.83618 E | RRS Challenger CH119B |
| 842171 | CTD or STD cast | 1995-06-26 21:35:00 | 53.8915 N, 0.68067 E | RRS Challenger CH119B |
| 2258383 | Water sample data | 1995-06-26 21:37:00 | 53.89148 N, 0.68071 E | RRS Challenger CH119B |
| 2259190 | Water sample data | 1995-06-26 21:37:00 | 53.89148 N, 0.68071 E | RRS Challenger CH119B |
| 842054 | CTD or STD cast | 1995-06-28 14:13:00 | 53.47833 N, 0.404 E | RRS Challenger CH119B |
| 2258426 | Water sample data | 1995-06-28 14:17:00 | 53.47827 N, 0.40403 E | RRS Challenger CH119B |
| 2259282 | Water sample data | 1995-06-28 14:17:00 | 53.47827 N, 0.40403 E | RRS Challenger CH119B |
| 843740 | CTD or STD cast | 1995-06-30 23:35:00 | 53.771 N, 0.82983 E | RRS Challenger CH119C |
| 843752 | CTD or STD cast | 1995-07-01 02:10:00 | 53.65517 N, 0.96483 E | RRS Challenger CH119C |
| 842588 | CTD or STD cast | 1995-07-01 04:58:00 | 53.47983 N, 0.3995 E | RRS Challenger CH119C |
| 843764 | CTD or STD cast | 1995-07-01 07:05:00 | 53.55 N, 0.11833 E | RRS Challenger CH119C |
| 843776 | CTD or STD cast | 1995-07-01 08:04:00 | 53.54983 N, 0.11883 E | RRS Challenger CH119C |
| 843788 | CTD or STD cast | 1995-07-01 09:03:00 | 53.55017 N, 0.1205 E | RRS Challenger CH119C |
| 842607 | CTD or STD cast | 1995-07-01 10:04:00 | 53.55067 N, 0.121 E | RRS Challenger CH119C |
| 842804 | CTD or STD cast | 1995-07-01 11:04:00 | 53.55083 N, 0.121 E | RRS Challenger CH119C |
| 842816 | CTD or STD cast | 1995-07-01 12:02:00 | 53.551 N, 0.12133 E | RRS Challenger CH119C |
| 842828 | CTD or STD cast | 1995-07-01 13:03:00 | 53.55067 N, 0.12083 E | RRS Challenger CH119C |
| 842841 | CTD or STD cast | 1995-07-01 14:01:00 | 53.55033 N, 0.11983 E | RRS Challenger CH119C |
| 842681 | CTD or STD cast | 1995-07-01 15:00:00 | 53.55033 N, 0.11967 E | RRS Challenger CH119C |
| 842853 | CTD or STD cast | 1995-07-01 16:04:00 | 53.55033 N, 0.119 E | RRS Challenger CH119C |
| 842865 | CTD or STD cast | 1995-07-01 17:03:00 | 53.55067 N, 0.11883 E | RRS Challenger CH119C |
| 842877 | CTD or STD cast | 1995-07-01 18:03:00 | 53.55083 N, 0.1185 E | RRS Challenger CH119C |
| 842693 | CTD or STD cast | 1995-07-01 19:02:00 | 53.55033 N, 0.11833 E | RRS Challenger CH119C |
| 842889 | CTD or STD cast | 1995-07-01 20:02:00 | 53.551 N, 0.11833 E | RRS Challenger CH119C |
| 842890 | CTD or STD cast | 1995-07-01 23:18:00 | 53.32433 N, 0.41317 E | RRS Challenger CH119C |
| 842700 | CTD or STD cast | 1995-07-02 01:21:00 | 53.4 N, 0.77867 E | RRS Challenger CH119C |
| 842908 | CTD or STD cast | 1995-07-02 03:43:00 | 53.48333 N, 0.999 E | RRS Challenger CH119C |
| 842921 | CTD or STD cast | 1995-07-02 07:37:00 | 52.99467 N, 0.39333 E | RRS Challenger CH119C |
| 842933 | CTD or STD cast | 1995-07-02 10:08:00 | 53.2505 N, 0.6505 E | RRS Challenger CH119C |
| 842712 | CTD or STD cast | 1995-07-02 12:49:00 | 52.99983 N, 1.0675 E | RRS Challenger CH119C |
| 842945 | CTD or STD cast | 1995-07-02 15:19:00 | 53.29317 N, 1.35 E | RRS Challenger CH119C |
| 842957 | CTD or STD cast | 1995-07-02 18:56:00 | 52.9 N, 1.51167 E | RRS Challenger CH119C |
| 842724 | CTD or STD cast | 1995-07-02 20:59:00 | 52.71067 N, 1.82033 E | RRS Challenger CH119C |
| 842969 | CTD or STD cast | 1995-07-02 23:16:00 | 52.7815 N, 2.21117 E | RRS Challenger CH119C |
| 842970 | CTD or STD cast | 1995-07-03 02:00:00 | 52.95017 N, 1.84017 E | RRS Challenger CH119C |
| 842484 | CTD or STD cast | 1995-07-03 07:29:00 | 53.64733 N, 0.968 E | RRS Challenger CH119C |
| 843703 | CTD or STD cast | 1995-07-03 10:08:00 | 53.88983 N, 0.68367 E | RRS Challenger CH119C |
| 842496 | CTD or STD cast | 1995-07-03 13:03:00 | 53.72733 N, 0.13083 E | RRS Challenger CH119C |
| 842503 | CTD or STD cast | 1995-07-03 14:42:00 | 53.87667 N, 0.01217 E | RRS Challenger CH119C |
| 843715 | CTD or STD cast | 1995-07-03 17:40:00 | 54.03267 N, 0.51817 E | RRS Challenger CH119C |
| 843659 | CTD or STD cast | 1995-07-10 01:52:00 | 53.73 N, 0.657 E | RRS Challenger CH119C |
| 843451 | CTD or STD cast | 1995-07-10 06:24:00 | 53.35033 N, 0.49417 E | RRS Challenger CH119C |
| 843463 | CTD or STD cast | 1995-07-10 08:53:00 | 53.24967 N, 0.6455 E | RRS Challenger CH119C |
| 842982 | CTD or STD cast | 1995-07-10 13:05:00 | 52.98917 N, 0.40033 E | RRS Challenger CH119C |
| 843660 | CTD or STD cast | 1995-07-10 14:02:00 | 52.98917 N, 0.4005 E | RRS Challenger CH119C |
| 842994 | CTD or STD cast | 1995-07-10 15:03:00 | 52.98917 N, 0.39983 E | RRS Challenger CH119C |
| 843008 | CTD or STD cast | 1995-07-10 16:02:00 | 52.98933 N, 0.40017 E | RRS Challenger CH119C |
| 843672 | CTD or STD cast | 1995-07-10 17:13:00 | 52.9895 N, 0.40033 E | RRS Challenger CH119C |
| 843475 | CTD or STD cast | 1995-07-10 18:00:00 | 52.9905 N, 0.40083 E | RRS Challenger CH119C |
| 843487 | CTD or STD cast | 1995-07-10 18:59:00 | 52.99033 N, 0.40233 E | RRS Challenger CH119C |
| 843499 | CTD or STD cast | 1995-07-10 20:00:00 | 52.9905 N, 0.40283 E | RRS Challenger CH119C |
| 843506 | CTD or STD cast | 1995-07-10 20:59:00 | 52.99033 N, 0.4025 E | RRS Challenger CH119C |
| 843518 | CTD or STD cast | 1995-07-10 21:59:00 | 52.99017 N, 0.40083 E | RRS Challenger CH119C |
| 843531 | CTD or STD cast | 1995-07-10 23:02:00 | 52.98967 N, 0.40017 E | RRS Challenger CH119C |
| 843543 | CTD or STD cast | 1995-07-11 00:01:00 | 52.9895 N, 0.4 E | RRS Challenger CH119C |
| 843807 | CTD or STD cast | 1995-07-11 01:25:00 | 52.98933 N, 0.40033 E | RRS Challenger CH119C |
| 843555 | CTD or STD cast | 1995-07-11 02:00:00 | 52.98917 N, 0.40033 E | RRS Challenger CH119C |
| 843567 | CTD or STD cast | 1995-07-11 02:19:00 | 52.98917 N, 0.4005 E | RRS Challenger CH119C |
