Metadata Report for BODC Series Reference Number 1623617
Metadata Summary
Problem Reports
Data Access Policy
Narrative Documents
Project Information
Data Activity or Cruise Information
Fixed Station Information
BODC Quality Flags
SeaDataNet Quality Flags
Metadata Summary
Data Description |
|||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||
Data Identifiers |
|||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||
Time Co-ordinates(UT) |
|||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||
Spatial Co-ordinates | |||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||
Parameters |
|||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||
Problem Reports
No Problem Report Found in the Database
Originator's quality control comments for PD29_08 COBS moorings
Data supplied to BODC were accompanied by data quality notes from the Originator that detailed observations made when the data were processed and subsequent processing decisions. A summary of these notes have been provided in the tables below.
Rig#1043
| Instrument | Serial number | Instrument depth | Data quality comments |
|---|---|---|---|
| Sea-Bird MicroCAT | 05793 | 5 m | There was no deployment CTD to perform CTD comparison checks, however the quality of the temperature and conductivity data appears to be satisfactory. |
| Star-Oddi minilogger | 02842 | 7.5 m | The temperature data recorded by this sensor was offset by -0.03°C when compared to the Sea-Bird MicroCATs and Sea-Bird 16plus at this site. All temperature values have been adjusted by +0.03°C to compensate for this offset. |
| Sea-Bird MicroCAT | 05792 | 10 m | All conductivity data recorded between 2008-10-29 08:00:00 UTC and 2008-11-07 05:10:00 UTC has been converted to absent data values. |
| Star-Oddi minilogger | 02843 | 15 m | The temperature data recorded by this sensor was offset by -0.01°C when compared to the Sea-Bird MicroCATs and Sea-Bird 16plus at this site. All temperature values have been adjusted by +0.01°C to compensate for this offset. |
Rig#1044
| Instrument | Serial number | Instrument depth | Data quality comments |
|---|---|---|---|
| Sea-Bird 16+ SEACAT fitted with Seapoint Turbidity Meter #10471 | 05309 | Located on seabed | All conductivity data recorded after 2008-10-05 00:00:03 UTC have been converted into absent data values by the Data Originator. After these data were compared to the other instruments present at this site, an offset of -0.14 was found in the salinity channel. All salinity values were adjusted by +0.14 to compensate for this offset. |
| Teledyne RDI 600 kHz ADCP | 5803 | Located on seabed | To correct for the magnetic declination (difference between magnetic north and true north) latitude values were changed by -3.4777°. All latitude values were modified by -2.6393° to correct for the compass error. |
Rig#1045
| Instrument | Serial number | Instrument depth | Data quality comments |
|---|---|---|---|
| Sea-Bird MicroCAT | 05791 | 5 m | There was no deployment CTD available to perform CTD comparison checks, however the other CTD checks found small offsets in temperature and conductivity. No adjustments have been made to these data. |
| Star-Oddi minilogger | 02847 | 7.5 m | The temperature data recorded by this sensor was offset by -0.02°C when compared to the Sea-Bird MicroCATs and Sea-Bird 16plus at this site. All temperature values have been adjusted by +0.02°C to compensate for this offset. |
| Sea-bird MicroCAT | 05433 | 10 m | None. |
| Star-Oddi minilogger | 02849 | 15 m | The temperature data recorded by this sensor was offset by -0.02°C when compared to the Sea-Bird MicroCATs and Sea-Bird 16plus at this site. All temperature values have been adjusted by +0.02°C to compensate for this offset. |
Rig#1046
| Instrument | Serial number | Instrument depth | Data quality comments |
|---|---|---|---|
| Sea-bird 16+ SEACAT fitted with Seapoint Turbidity Meter #10320 | 05310 | Located on seabed | This series was cut short due to a battery failure on 2008-11-24. The shape of this profile is similar to MicroCAT 05433 which suggests the data may be good quality, there was only one CTD cast available to perform comparison checks, so the Data Originator recommends that these data are used with caution. Pressure was unrealistic after 02-11-2008 23:00:03 UTC and has been converted into absent data values by the Data Originator. |
| Teledyne RDI 600 kHz ADCP | 3644 | Located on seabed |
|
Data Access Policy
Open Data
These data have no specific confidentiality restrictions for users. However, users must acknowledge data sources as it is not ethical to publish data without proper attribution. Any publication or other output resulting from usage of the data should include an acknowledgment.
If the Information Provider does not provide a specific attribution statement, or if you are using Information from several Information Providers and multiple attributions are not practical in your product or application, you may consider using the following:
"Contains public sector information licensed under the Open Government Licence v1.0."
Narrative Documents
Teledyne RDI Workhorse Sentinel 600 kHz Acoustic Doppler Current Profiler (ADCP)
The Workhorse Sentinel is a self-contained ADCP that can be used either on a mooring or mounted in the hull of a moving vessel. Its 4-beam design provides a redundant data source (in case of a blocked or damaged beam), an independent data quality measure (error velocity) and reduces the variance in data, thereby improving data reliability, quality and accuracy.
Real-time data can be transmitted to shore via a cable link or acoustic modem or they can be stored internally. Sensors for bottom tracking, pressure and directional wave measurements can be added to the instrument and a special casing is available for deeper applications.
Specifications
| Typical range | 50 m |
| Number of depth cells | 1 to 128 |
| Typical ping rate | 2 Hz |
| Standard depth rating | 200 to 6000 m |
| Beam angle | 20 ° |
| Echo intensity profile | |
| Dynamic range | 80 dB |
| Precision | ± 1.5 dB |
| Velocity | |
| Accuracy | 0.3% of the water velocity relative to the ADCP ± 0.3 cm s-1 |
| Resolution | 0.1 cm s-1 |
| Range | ± 5 m s-1 (default) ± 20 m s-1 (maximum) |
| Vertical resolution | Range / Std Dev |
| for 0.5 m | 39 m / 12.9 cm s-1 |
| for 1 m | 43 m / 6.1 cm s-1 |
| for 2 m | 47 m / 3.0 cm s-1 |
| for 4 m | 52 m / 2.0 cm s-1 |
| Long Range mode | |
| Range | 70 m |
| Depth cell size | 4 m |
| Std Deviation | 4.2 cm s-1 |
| Temperature | |
| Operating temp. | -5 to 45 °C |
| Precision | ± 0.4 °C |
| Resolution | 0.01 °C |
| Tilt | |
| Range | ± 15 ° |
| Accuracy | ± 0.5 ° |
| Precision | ± 0.5 ° |
| Resolution | 0.01 ° |
| Compass | |
| Accuracy | ± 2 ° |
| Resolution | 0.01 ° |
| Maximum tilt | ± 15 ° |
| Precision | ± 0.5 ° |
Further details can be found in the manufacturer's specification sheet.
BODC Processing document for Coastal Observatory moored ADCP data
The data arrived at BODC as 117 ASCII format .dat files representing moored ADCP data recorded at the Coastal Observatory sites 1(9), 20 and 21 between 07 August 2002 and 20 September 2011. Following standard BODC procedure the files were reformatted into BODC standard internal format using an internal transfer function. The following table shows how the originator's variables were mapped to the appropriate BODC parameter codes:
| Originator's variable | Units | Description | BODC parameter code | Units | Comments |
|---|---|---|---|---|---|
| Sea surface height | m | Surface elevation (Mean Water Height) of the water body by acoustic doppler current profiler (ADCP) | ASLVMWHA | Metres | - |
| East | cm/s | Eastward current velocity (Eulerian) in the water body by moored acoustic doppler current profiler (ADCP) | LCEWAP01 | cm s-1 | - |
| North | cm/s | Northward current velocity (Eulerian) in the water body by moored acoustic doppler current profiler (ADCP) | LCNSAP01 | cm s-1 | - |
| Vertical | cm/s | Upward current velocity in the water body by moored acoustic doppler current profiler (ADCP) | LRZAAP01 | cm s-1 | - |
| Error | cm/s | Current velocity error in the water body by moored acoustic doppler current profiler (ADCP) | LERRAP01 | cm s-1 | - |
| Height from sea bed | m | Height above bed (ADCP bin) in the water body | HBINAA01 | Metres | - |
The reformatted data were visualised using the in-house EDSERPLO software. Suspect data were marked by adding an appropriate quality control flag, missing data by both setting the data to an appropriate value and setting the quality control flag.
COBS RDI Teledyne 600 kHz ADCP Data Processing
Sampling Strategy
Two mooring sites were maintained for the duration of the Liverpool Bay Coastal Observatory project. Moored instruments present at Site A (also known as Site 1/9) through the entire data collection phase of the observatory. From 05 April 2005 (Cruise PD11_05) moorings were also present at an additional Site B. From April 2005 until December 2009 mooring Site B was located at Coastal Observatory Station 20. The moorings were moved to Station 21 from January 2010, where they remained until the end of the observatory.
Originator's Processing
The raw ADCP data were processed using the standard RDI software bblist which resulted in the creation of two files, the first containing the current velocities separated by bin depth and an auxiliary file containing the variables heading, pitch, roll, temperature and pressure. The variables present in the auxiliary files were only used for quality control purposes with the exception of pressure, which was used to calculate sea surface height taking into account the latitude and the height of the transducer head above the seabed, which was estimated to be 0.7 m. Sea surface height and the current velocity data were then combined into one file.
Before the data were supplied to BODC, some quality control procedures were performed by the Data Originator. First the Originator corrected the latitude values to take into account the difference between magnetic north and true north (magnetic declination). The Originator also corrected the latitude values for compass error caused by localised magnetic fields such as the ADCP frame and battery, using HF radar data recorded by two HF radars located at Abergele and Formby as a reference. Once compass errors for all ADCP series recorded at Site A had been calculated, a mean of all errors was taken. As the ADCP compass error is a random error, the expected mean of all errors is approximately 0°, however the Originator found that the actual mean compass error was approximately 5.3°. All compass errors were therefore modified by 5.3°. The compass error values given in the Originator's data processing documents have taken this adjustment into account.
The bins recorded above the sea surface were then converted to absent data indicators by the Data Originator. If there were any problems with the pressure data recorded by the ADCP, then data from another instrument attached to the same frame was used instead. If no pressure records were available, then backscatter intensity was used to calculate the sea surface. The top three bins have been removed in all series to remove noise in these data caused by side lobe contamination. A more detailed explanation of all of the quality control procedures performed before the data were submitted to BODC can be found in the Originator's ADCP quality control methodology document.
Prior to cruise PD33_08 the data originator had been correcting the mid-water current velocities to account for contamination caused by the recovery line attached to the ADCP lander frame. The mooring design was changed from PD33_08, and this redesign successfully eradicated the beam contamination issues that had affected previous deployments. Therefore, no three-beam correction has been applied to these data. This issue is explained in detail in the originator's ADCP correction report, however as previously stated no three-beam correction was applied to these data.
Finally a visual inspection of the data was carried out to find any obvious errors which had not been corrected by the previous quality control checks.
Project Information
Oceans 2025 Theme 10, Sustained Observation Activity 11: Liverpool Bay and Irish Sea Coastal Observatory
Sustained, systematic observations of the ocean and continental shelf seas at appropriate time and space scales allied to numerical models are key to understanding and prediction. In shelf seas these observations address issues as fundamental as 'what is the capacity of shelf seas to absorb change?' encompassing the impacts of climate change, biological productivity and diversity, sustainable management, pollution and public health, safety at sea and extreme events. Advancing understanding of coastal processes to use and manage these resources better is challenging; important controlling processes occur over a broad range of spatial and temporal scales which cannot be simultaneously studied solely with satellite or ship-based platforms.
Considerable effort has been spent by the Proudman Oceangraphic Laboratory (POL) in the years 2001 - 2006 in setting up an integrated observational and now-cast modelling system in Liverpool Bay (see Figure), with the recent POL review stating the observatory was seen as a leader in its field and a unique 'selling' point of the laboratory. Cost benefit analysis (IACMST, 2004) shows that benefits really start to accrue after 10 years. In 2007 - 2012 exploitation of (i) the time series being acquired, (ii) the model-data synthesis and (iii) the increasingly available quantities of real-time data (e.g. river flows) can be carried out through Sustained Observation Activity (SO) 11, to provide an integrated assessment and short term forecasts of the coastal ocean state.
Overall Aims and Purpose of SO 11
- To continue and enlarge the scope of the existing coastal observatory in Liverpool Bay to routinely monitor the northern Irish Sea
- To develop the synthesis of measurements and models in the coastal ocean to optimize measurement arrays and forecast products. Driving forward shelf seas' operational oceanography with the direct objective of improving the national forecasting capability, expressed through links to the National Centre for Ocean Forecasting (NCOF)
- To exploit the long time-series of observations and model outputs to: a) identify the roles of climate and anthropogenic inputs on the coastal ocean's physical and biological functioning (including impacts of nutrient discharges, offshore renewable energy installations and fishing activity) taking into consideration the importance of events versus mean storms / waves, river discharge / variable salinity stratification / horizontal gradients; b) predict the impacts of climate change scenarios; and c) provide new insights to Irish Sea dynamics for variables either with seasonal cycles and interannual variability, or which show weak or no seasonal cycles
- To provide and maintain a 'laboratory' within which a variety of observational and model experiments can be undertaken (Oceans 2025 Themes 3, 6, 8, 9), including capture of extreme events
- Demonstrate the value of an integrated approach in assessment and forecasting
- Demonstrate the coastal observatory as a tool for marine management strategies through collaboration with the Environment Agency (EA), Department for Environment, Food and Rural Affairs (DEFRA), Joint Nature Conservation Commmittee (JNCC), English Nature (EN), Department of Agriculture and Rural Development (DARD), and Local Authorities, providing management information pertinent to policy (e.g. Water Framework Directive)
Measurement and Modelling Activities
- East Mooring Site: Bottom frame with full suite of physical measurements (high frequency Acoustic Doppler Current Profiler (ADCP), conductivity, temperature, turbidity and fluorescence), a Centre for Environment, Fisheries and Aquaculture Science (CEFAS) directional wavebuoy, and a CEFAS Smartbuoy collecting surface properties including salinity, temperature, turbidity, nutrients, irradiance and chlorophyll. All transmit data in real-time via Orbcomm. The Smartbuoy also collects daily water samples.
- West Mooring Site: Bottom frame with full suite of physical measurements (high frequency ADCP, conductivity, temperature, turbidity and fluorescence), CEFAS Smartbuoy.
- Spatial Survey: Four - six week intervals (determined by biofouling of optical sensors). Spatial surveys comprise of vertical profiles of CTD, suspended particulate material (SPM), some bed sediment sampling and surface and bed nutrients, phytoplankton, zooplankton.
- Ferry: The Birkenhead - Belfast ferry samples near surface (5 m depth) temperature, salinity, turbidity, chlorophyll, with data transmitted by Orbcomm. The route is scientifically varied passing through six completely different hydrodynamic regions, which significantly impact on their ecological function.
- Tide gauges: Real-time data are obtained from tide gauges operated by Mersey Docks and Harbour Company (MDHC) and the UK tide gauge network.
- Satellite imagery: Weekly composite satellite data, Advanced Very High Resolution Radiometer (AVHRR) sea surface temperature (SST) and ocean colour (chlorophyll and suspended sediment), are provided by the Remote Sensing Data Analysis Service (RSDAS) based at Plymouth Marine Laboratory (PML).
- HF radar: A phased array HF radar system (a 12-16MHz WERA HF radar) measuring surface currents and waves with maximum range 75km at a resolution of 4km for sea surface currents and for 2-D wave spectra.
- Meteorology station: With web camera, located on Hilbre Island at the mouth of the Dee Estuary
- Operational models: The Coastal Observatory uses Proudman Oceanographic Laboratory Coastal Ocean Modelling System (POLCOMS), which is part of Oceans 2025 Theme 9.
More detailed information on this Work Package is available at pages 32 - 35 of the official Oceans 2025 Theme 10 document: Oceans 2025 Theme 10
Weblink: http://www.oceans2025.org/
References:
IACMST., 2004. The Economics of Sustained Marine Measurements. IACMST Information Document, N0.11, Southampton: IACMST, 96 pp
Data Activity or Cruise Information
Data Activity
| Start Date (yyyy-mm-dd) | 2008-09-10 |
| End Date (yyyy-mm-dd) | 2008-12-11 |
| Organization Undertaking Activity | Proudman Oceanographic Laboratory (now National Oceanography Centre, Liverpool) |
| Country of Organization | United Kingdom |
| Originator's Data Activity Identifier | POLRIG1046 |
| Platform Category | fixed benthic node |
Proudman Oceanographic Laboratory Rig#1046
Deployment and Recovery
This rig was deployed at Site B as part of the Liverpool Bay Coastal Observatory. Recovery was supposed to take place in October during cruise PD33_08, but due to poor weather conditions, this was postponed until the December cruise, PD37_08.
| Deployment cruise | RV Prince Madog cruise PD29/08 |
|---|---|
| Recovery cruise | RV Prince Madog cruise PD37/08 |
| Rig position | 53° 27.014'N 3° 38.603'W |
| Water Depth | 24.6 m |
Rig Description
The rig is made up of a bottom frame which was deployed onto the sea bed. Instruments were mounted on the frame, as described in the table below. The frame was fitted with a fizz link, a spooler with 50 m of rope for recovery of the ballast weight and two Benthos releases s/n 70355 (Rx 10.0 kHz, Tx 12.0 kHz, release B) and s/n 72382 (Rx 10.0 kHz, Tx 12.0 kHz, release A).
| Instrument | Serial Number | Meter height above bed (m) | Comment |
|---|---|---|---|
| RDI 600 kHz Waves ADCP | 3644 | 0.5 | - |
| RDI 1200 kHz Telemetry ADCP | 0572 | 0.5 | - |
| Sea-Bird 16plus V RS-232 1.8c | 5310 | 0.5 | Instrument fitted to base of frame with pumped conductivity sensor underneath. SeaPoint turbidity sensor 10320 (0-500 FTU) taped to roll bar. |
Related Data Activity activities are detailed in Appendix 1
Cruise
| Cruise Name | PD29/08 |
| Departure Date | 2008-09-10 |
| Arrival Date | 2008-09-11 |
| Principal Scientist(s) | Phil J Knight (Proudman Oceanographic Laboratory) |
| Ship | RV Prince Madog |
Complete Cruise Metadata Report is available here
Fixed Station Information
Fixed Station Information
| Station Name | Coastal Observatory Site 21 |
| Category | Offshore location |
| Latitude | 53° 27.13' N |
| Longitude | 3° 38.48' W |
| Water depth below MSL | 25.0 m |
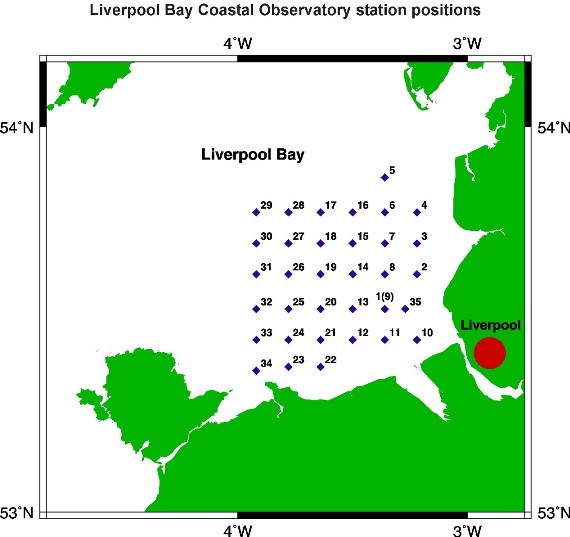
Liverpool Bay Coastal Observatory Site 21
This station is one of 34 stations regularly visited by the Proudman Oceanographic Laboratory (POL) as part of the Liverpool Bay Coastal Observatory. The main activity at this site are CTD profiles (since August 2002) which are taken during each site visit. This station was also the secondary mooring site (also referred to as Site B) for the Coastal Observatory project between April 2005 and March 2010. After March 2010 the moorings were moved to site 20. The station lies within a box of mean water depth 24 m with the following co-ordinates:
| Box Corner | Latitude (+ve North) | Longitude (+ve East) |
|---|---|---|
| North-west corner | 53.46028 | -3.658 |
| South-east corner | 53.44249 | -3.6105 |
The position of this station relative to the other POL Coastal Observatory sites can be seen from the figure below.
Mooring Deployment History
2010
| Rig Type | Typical Instruments | Rig IDs | Comment |
|---|---|---|---|
| Frame | ADCP, CTD, OBS, Telemetry ADCP | 1088, 1092, 1096, 1100, 1104, 1107, 1111 | January - December |
| SmartBuoy | CT, FL, OBS, BD | 1087, 1091, 1095, 1099, 1103, 1110, 1115 | January - December |
2009
| Rig Type | Typical Instruments | Rig IDs | Comment |
|---|---|---|---|
| Frame | ADCP, CTD, OBS, Telemetry ADCP | 1057, 1065, 1069, 1072, 1076, 1080, 1084 | January - December |
| SmartBuoy | CT, FL, OBS, BD | 1056, 1064, 1068, 1075, 1079, 1083 | January - December |
2008
| Rig Type | Typical Instruments | Rig IDs | Comment |
|---|---|---|---|
| Frame | ADCP, CTD, OBS, Telemetry ADCP | 1026, 1030, 1033, 1038, 1053 | January - December |
| SmartBuoy | CT, FL, OBS, BD | LB2_023/1025, LB2_024/1029, LB2_025/1034, LB2_026/1037, LB2_029/1052 | January - December |
2007
| Rig Type | Typical Instruments | Rig IDs | Comment |
|---|---|---|---|
| Frame | ADCP, CTD, OBS, Telemetry ADCP | 992, 999, 1002, 1007, 1012, 1019 | January - December |
| SmartBuoy | CT, FL, OBS, BD | 991, LB2_016/998, LB2_017/1003, LB2_018/1006, LB2_019/1011, LB2_020/1015, LB2_021/1018, LB2_022/1022 | January - December |
2006
| Rig Type | Typical Instruments | Rig IDs | Comment |
|---|---|---|---|
| Frame | ADCP, CTD, OBS, Telemetry ADCP | 952, 960, 964, 968, 972, 976, 980, 984, 988 | January - December |
| SmartBuoy | CT, FL, OBS, BD | LB2_006, LB2_007, LB2_008, LB2_009, LB2_010, LB2_011, LB2_012, LB2_013/983, LB2_014/987 | January - December |
2005
| Rig Type | Typical Instruments | Rig IDs | Comment |
|---|---|---|---|
| Frame | ADCP, CTD, OBS | 923, 927, 931, 936, 940, 943, 947, 950 | January - December |
| SmartBuoy | CT, FL, OBS, WMS | LB2_001/926, LB2_002/930, LB2_003/935, LB2_004/939, LB2_005/946 | May - December |
| Marker buoy | CT | 922 | April - May |
CTD Sampling History
| Year | Number of Cruises | Total Casts per year |
| 2011 | 5 | 5 |
| 2010 | 6 | 6 |
| 2009 | 7 | 18 |
| 2008 | 9 | 16 |
| 2007 | 8 | 17 |
| 2006 | 9 | 18 |
| 2005 | 9 | 14 |
| 2004 | 8 | 8 |
| 2003 | 9 | 9 |
| 2002 | 2 | 2 |
The CTD instrument package for these cruises was a Sea-Bird 911plus, with beam transmissometer, fluorometer, LICOR PAR sensor, LISST-25, and oxygen sensor.
Key
ADCP = Acoustic Doppler Current Profiler
BD = Bacterial degradation experiment
CT = Conductivity and temperature logger
CTD = Conductivity, temperature, depth sensor
FL = Fluorometer
OBS = Optical Backscatter Turbidity meter
Telemetry ADCP = ADCP sending data back to shore in real-time
WMS = Automatic water sampler
Related Fixed Station activities are detailed in Appendix 2
BODC Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| Blank | Unqualified |
| < | Below detection limit |
| > | In excess of quoted value |
| A | Taxonomic flag for affinis (aff.) |
| B | Beginning of CTD Down/Up Cast |
| C | Taxonomic flag for confer (cf.) |
| D | Thermometric depth |
| E | End of CTD Down/Up Cast |
| G | Non-taxonomic biological characteristic uncertainty |
| H | Extrapolated value |
| I | Taxonomic flag for single species (sp.) |
| K | Improbable value - unknown quality control source |
| L | Improbable value - originator's quality control |
| M | Improbable value - BODC quality control |
| N | Null value |
| O | Improbable value - user quality control |
| P | Trace/calm |
| Q | Indeterminate |
| R | Replacement value |
| S | Estimated value |
| T | Interpolated value |
| U | Uncalibrated |
| W | Control value |
| X | Excessive difference |
SeaDataNet Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| 0 | no quality control |
| 1 | good value |
| 2 | probably good value |
| 3 | probably bad value |
| 4 | bad value |
| 5 | changed value |
| 6 | value below detection |
| 7 | value in excess |
| 8 | interpolated value |
| 9 | missing value |
| A | value phenomenon uncertain |
| B | nominal value |
| Q | value below limit of quantification |
Appendix 1: POLRIG1046
Related series for this Data Activity are presented in the table below. Further information can be found by following the appropriate links.
If you are interested in these series, please be aware we offer a multiple file download service. Should your credentials be insufficient for automatic download, the service also offers a referral to our Enquiries Officer who may be able to negotiate access.
| Series Identifier | Data Category | Start date/time | Start position | Cruise |
|---|---|---|---|---|
| 939219 | Hydrography time series at depth | 2008-09-11 08:00:03 | 53.45017 N, 3.64333 W | RV Prince Madog PD29/08 |
Appendix 2: Coastal Observatory Site 21
Related series for this Fixed Station are presented in the table below. Further information can be found by following the appropriate links.
If you are interested in these series, please be aware we offer a multiple file download service. Should your credentials be insufficient for automatic download, the service also offers a referral to our Enquiries Officer who may be able to negotiate access.
| Series Identifier | Data Category | Start date/time | Start position | Cruise |
|---|---|---|---|---|
| 1622706 | Currents -subsurface Eulerian | 2005-04-05 10:00:00 | 53.45417 N, 3.64533 W | RV Prince Madog PD11/05 |
| 701686 | Hydrography time series at depth | 2005-04-05 10:00:01 | 53.45217 N, 3.6435 W | RV Prince Madog PD11/05 |
| 701871 | Hydrography time series at depth | 2005-04-05 10:00:03 | 53.45417 N, 3.64533 W | RV Prince Madog PD11/05 |
| 1622731 | Currents -subsurface Eulerian | 2005-05-12 08:20:00 | 53.45417 N, 3.64533 W | RV Prince Madog PD18/05 |
| 701883 | Hydrography time series at depth | 2005-05-12 08:20:03 | 53.45417 N, 3.64533 W | RV Prince Madog PD18/05 |
| 1195131 | Fluorescence or pigments | 2005-05-12 08:30:00 | 53.4522 N, 3.6413 W | RV Prince Madog PD18/05 |
| 1195118 | Hydrography time series at depth | 2005-05-12 08:30:00 | 53.4522 N, 3.6413 W | RV Prince Madog PD18/05 |
| 1195143 | Transmittance/attenuance, turbidity, or SPM conc. | 2005-05-12 08:30:00 | 53.4522 N, 3.6413 W | RV Prince Madog PD18/05 |
| 701717 | Hydrography time series at depth | 2005-05-12 08:30:01 | 53.45217 N, 3.64133 W | RV Prince Madog PD18/05 |
| 701698 | Hydrography time series at depth | 2005-05-12 08:35:00 | 53.45217 N, 3.64133 W | RV Prince Madog PD18/05 |
| 1195155 | Water column chemistry | 2005-05-14 00:00:00 | 53.4522 N, 3.6413 W | RV Prince Madog PD18/05 |
| 1622755 | Currents -subsurface Eulerian | 2005-06-16 08:10:00 | 53.45367 N, 3.64717 W | RV Prince Madog PD21/05 |
| 701914 | Hydrography time series at depth | 2005-06-16 08:10:03 | 53.45367 N, 3.64717 W | RV Prince Madog PD21/05 |
| 1195179 | Fluorescence or pigments | 2005-06-16 08:30:00 | 53.4512 N, 3.6482 W | RV Prince Madog PD21/05 |
| 1195167 | Hydrography time series at depth | 2005-06-16 08:30:00 | 53.4512 N, 3.6482 W | RV Prince Madog PD21/05 |
| 1195180 | Transmittance/attenuance, turbidity, or SPM conc. | 2005-06-16 08:30:00 | 53.4512 N, 3.6482 W | RV Prince Madog PD21/05 |
| 701858 | Hydrography time series at depth | 2005-06-16 08:30:01 | 53.45117 N, 3.64817 W | RV Prince Madog PD21/05 |
| 701729 | Hydrography time series at depth | 2005-06-16 08:35:00 | 53.45117 N, 3.64817 W | RV Prince Madog PD21/05 |
| 1195192 | Water column chemistry | 2005-06-17 00:00:00 | 53.4512 N, 3.6482 W | RV Prince Madog PD21/05 |
| 1622823 | Currents -subsurface Eulerian | 2005-07-14 07:00:00 | 53.45367 N, 3.64733 W | RV Prince Madog PD25/05 |
| 698775 | Hydrography time series at depth | 2005-07-14 07:00:03 | 53.45367 N, 3.64733 W | RV Prince Madog PD25/05 |
| 698880 | Hydrography time series at depth | 2005-07-14 07:15:00 | 53.45333 N, 3.64217 W | RV Prince Madog PD25/05 |
| 698867 | Hydrography time series at depth | 2005-07-14 07:20:01 | 53.45333 N, 3.64217 W | RV Prince Madog PD25/05 |
| 1195223 | Fluorescence or pigments | 2005-07-14 07:30:00 | 53.4533 N, 3.6422 W | RV Prince Madog PD25/05 |
| 1195211 | Hydrography time series at depth | 2005-07-14 07:30:00 | 53.4533 N, 3.6422 W | RV Prince Madog PD25/05 |
| 1195235 | Transmittance/attenuance, turbidity, or SPM conc. | 2005-07-14 07:30:00 | 53.4533 N, 3.6422 W | RV Prince Madog PD25/05 |
| 1195247 | Water column chemistry | 2005-07-15 00:00:00 | 53.4533 N, 3.6422 W | RV Prince Madog PD25/05 |
| 1622859 | Currents -subsurface Eulerian | 2005-08-18 11:40:00 | 53.454 N, 3.64817 W | RV Prince Madog PD30/05 |
| 698806 | Hydrography time series at depth | 2005-08-18 11:40:03 | 53.454 N, 3.64817 W | RV Prince Madog PD30/05 |
| 679323 | Fluorescence or pigments | 2005-08-18 12:00:00 | 53.4518 N, 3.649 W | RV Prince Madog PD30/05 |
| 698855 | Hydrography time series at depth | 2005-08-18 12:00:00 | 53.45183 N, 3.649 W | RV Prince Madog PD30/05 |
| 679335 | Surface temp/sal | 2005-08-18 12:00:00 | 53.4518 N, 3.649 W | RV Prince Madog PD30/05 |
| 679347 | Transmittance/attenuance, turbidity, or SPM conc. | 2005-08-18 12:00:00 | 53.4518 N, 3.649 W | RV Prince Madog PD30/05 |
| 679359 | Water column chemistry | 2005-08-20 00:00:00 | 53.4518 N, 3.649 W | RV Prince Madog PD30/05 |
| 1622903 | Currents -subsurface Eulerian | 2005-09-16 10:00:00 | 53.45467 N, 3.649 W | RV Prince Madog PD34/05 |
| 698818 | Hydrography time series at depth | 2005-09-16 10:00:03 | 53.45467 N, 3.649 W | RV Prince Madog PD34/05 |
| 1622940 | Currents -subsurface Eulerian | 2005-10-27 09:30:00 | 53.45 N, 3.64317 W | RV Prince Madog PD41/05 |
| 696314 | Hydrography time series at depth | 2005-10-27 09:30:03 | 53.45 N, 3.64317 W | RV Prince Madog PD41/05 |
| 679372 | Fluorescence or pigments | 2005-10-27 10:00:00 | 53.4499 N, 3.6407 W | RV Prince Madog PD41/05 |
| 679360 | Surface temp/sal | 2005-10-27 10:00:00 | 53.4499 N, 3.6407 W | RV Prince Madog PD41/05 |
| 679384 | Transmittance/attenuance, turbidity, or SPM conc. | 2005-10-27 10:00:00 | 53.4499 N, 3.6407 W | RV Prince Madog PD41/05 |
| 696547 | Hydrography time series at depth | 2005-10-27 10:00:01 | 53.45 N, 3.64083 W | RV Prince Madog PD41/05 |
| 696351 | Hydrography time series at depth | 2005-12-14 12:00:03 | 53.45 N, 3.658 W | RV Prince Madog PD48/05 |
| 1622988 | Currents -subsurface Eulerian | 2005-12-15 14:39:38 | 53.45 N, 3.658 W | RV Prince Madog PD48/05 |
| 1623064 | Currents -subsurface Eulerian | 2006-02-06 12:30:00 | 53.448 N, 3.639 W | RV Prince Madog PD04/06 |
| 696363 | Hydrography time series at depth | 2006-02-06 12:30:03 | 53.448 N, 3.639 W | RV Prince Madog PD04/06 |
| 679396 | Surface temp/sal | 2006-02-06 13:00:00 | 53.4481 N, 3.6393 W | RV Prince Madog PD04/06 |
| 679403 | Transmittance/attenuance, turbidity, or SPM conc. | 2006-02-06 13:00:00 | 53.4481 N, 3.6393 W | RV Prince Madog PD04/06 |
| 1623168 | Currents -subsurface Eulerian | 2006-04-05 13:20:00 | 53.44767 N, 3.638 W | RV Prince Madog PD12/06 |
| 700370 | Fluorescence or pigments | 2006-04-05 14:00:00 | 53.4455 N, 3.6279 W | RV Prince Madog PD12/06 |
| 700308 | Surface temp/sal | 2006-04-05 14:00:00 | 53.4455 N, 3.6279 W | RV Prince Madog PD12/06 |
| 700437 | Transmittance/attenuance, turbidity, or SPM conc. | 2006-04-05 14:00:00 | 53.4455 N, 3.6279 W | RV Prince Madog PD12/06 |
| 700382 | Fluorescence or pigments | 2006-05-11 12:00:00 | 53.4437 N, 3.6237 W | RV Prince Madog PD16/06 |
| 700333 | Surface temp/sal | 2006-05-11 12:00:00 | 53.4437 N, 3.6237 W | RV Prince Madog PD16/06 |
| 700449 | Transmittance/attenuance, turbidity, or SPM conc. | 2006-05-11 12:00:00 | 53.4437 N, 3.6237 W | RV Prince Madog PD16/06 |
| 1623224 | Currents -subsurface Eulerian | 2006-05-30 20:18:38 | 53.4485 N, 3.6405 W | RV Prince Madog PD16/06 |
| 1623261 | Currents -subsurface Eulerian | 2006-06-23 13:30:00 | 53.44867 N, 3.64 W | RV Prince Madog PD20/06 |
| 700394 | Fluorescence or pigments | 2006-06-23 14:00:00 | 53.4495 N, 3.6415 W | RV Prince Madog PD20/06 |
| 700321 | Surface temp/sal | 2006-06-23 14:00:00 | 53.4495 N, 3.6415 W | RV Prince Madog PD20/06 |
| 700450 | Transmittance/attenuance, turbidity, or SPM conc. | 2006-06-23 14:00:00 | 53.4495 N, 3.6415 W | RV Prince Madog PD20/06 |
| 1623297 | Currents -subsurface Eulerian | 2006-07-27 08:00:00 | 53.44983 N, 3.64367 W | RV Prince Madog PD22/06 |
| 747069 | Fluorescence or pigments | 2006-07-27 08:30:00 | 53.4478 N, 3.6451 W | RV Prince Madog PD22/06 |
| 746945 | Surface temp/sal | 2006-07-27 08:30:00 | 53.4478 N, 3.6451 W | RV Prince Madog PD22/06 |
| 747174 | Transmittance/attenuance, turbidity, or SPM conc. | 2006-07-27 08:30:00 | 53.4478 N, 3.6451 W | RV Prince Madog PD22/06 |
| 747070 | Fluorescence or pigments | 2006-08-16 07:30:00 | 53.4508 N, 3.6409 W | RV Prince Madog PD25/06 |
| 746957 | Surface temp/sal | 2006-08-16 07:30:00 | 53.4508 N, 3.6409 W | RV Prince Madog PD25/06 |
| 747186 | Transmittance/attenuance, turbidity, or SPM conc. | 2006-08-16 07:30:00 | 53.4508 N, 3.6409 W | RV Prince Madog PD25/06 |
| 1623341 | Currents -subsurface Eulerian | 2006-08-16 11:00:00 | 53.44983 N, 3.64383 W | RV Prince Madog PD25/06 |
| 747082 | Fluorescence or pigments | 2006-09-22 10:00:00 | 53.4485 N, 3.6471 W | RV Prince Madog PD29/06 |
| 746969 | Surface temp/sal | 2006-09-22 10:00:00 | 53.4485 N, 3.6471 W | RV Prince Madog PD29/06 |
| 747198 | Transmittance/attenuance, turbidity, or SPM conc. | 2006-09-22 10:00:00 | 53.4485 N, 3.6471 W | RV Prince Madog PD29/06 |
| 1623377 | Currents -subsurface Eulerian | 2006-09-22 11:30:00 | 53.45 N, 3.644 W | RV Prince Madog PD29/06 |
| 1013211 | CTD or STD cast | 2006-11-02 12:28:00 | 53.45 N, 3.6525 W | RV Prince Madog PD35/06 |
| 747094 | Fluorescence or pigments | 2006-11-02 13:00:00 | 53.4508 N, 3.6408 W | RV Prince Madog PD35/06 |
| 746970 | Surface temp/sal | 2006-11-02 13:00:00 | 53.4508 N, 3.6408 W | RV Prince Madog PD35/06 |
| 747205 | Transmittance/attenuance, turbidity, or SPM conc. | 2006-11-02 13:00:00 | 53.4508 N, 3.6408 W | RV Prince Madog PD35/06 |
| 1623389 | Currents -subsurface Eulerian | 2006-11-02 13:50:00 | 53.45017 N, 3.644 W | RV Prince Madog PD35/06 |
| 753106 | Hydrography time series at depth | 2006-11-02 13:50:03 | 53.45017 N, 3.644 W | RV Prince Madog PD35/06 |
| 1013223 | CTD or STD cast | 2006-11-02 13:52:00 | 53.44767 N, 3.6445 W | RV Prince Madog PD35/06 |
| 1003658 | CTD or STD cast | 2006-12-15 11:32:00 | 53.4505 N, 3.64133 W | RV Prince Madog PD37/06 |
| 1623421 | Currents -subsurface Eulerian | 2006-12-15 14:39:57 | 53.44967 N, 3.64383 W | RV Prince Madog PD37/06 |
| 753131 | Hydrography time series at depth | 2006-12-15 14:40:03 | 53.44967 N, 3.64383 W | RV Prince Madog PD37/06 |
| 747101 | Fluorescence or pigments | 2006-12-15 15:00:00 | 53.4489 N, 3.6482 W | RV Prince Madog PD37/06 |
| 746982 | Surface temp/sal | 2006-12-15 15:00:00 | 53.4489 N, 3.6482 W | RV Prince Madog PD37/06 |
| 747217 | Transmittance/attenuance, turbidity, or SPM conc. | 2006-12-15 15:00:00 | 53.4489 N, 3.6482 W | RV Prince Madog PD37/06 |
| 1003671 | CTD or STD cast | 2006-12-15 15:25:00 | 53.447 N, 3.64433 W | RV Prince Madog PD37/06 |
| 1623052 | Currents -subsurface Eulerian | 2007-02-14 16:00:05 | 53.45 N, 3.64233 W | RV Prince Madog PD02/07 |
| 753155 | Hydrography time series at depth | 2007-02-14 16:10:03 | 53.45 N, 3.64233 W | RV Prince Madog PD02/07 |
| 979049 | CTD or STD cast | 2007-02-14 18:42:00 | 53.45167 N, 3.63917 W | RV Prince Madog PD02/07 |
| 979234 | CTD or STD cast | 2007-02-15 14:36:00 | 53.44867 N, 3.642 W | RV Prince Madog PD02/07 |
| 753087 | Hydrography time series at depth | 2007-03-13 10:50:01 | 53.45 N, 3.64217 W | RV Prince Madog PD04/07 |
| 747113 | Fluorescence or pigments | 2007-03-13 11:00:00 | 53.4504 N, 3.6372 W | RV Prince Madog PD04/07 |
| 746994 | Surface temp/sal | 2007-03-13 11:00:00 | 53.4504 N, 3.6372 W | RV Prince Madog PD04/07 |
| 747229 | Transmittance/attenuance, turbidity, or SPM conc. | 2007-03-13 11:00:00 | 53.4504 N, 3.6372 W | RV Prince Madog PD04/07 |
| 937495 | CTD or STD cast | 2007-04-16 10:59:00 | 53.449 N, 3.64667 W | RV Prince Madog PD06/07 |
| 1623088 | Currents -subsurface Eulerian | 2007-04-16 11:00:00 | 53.45083 N, 3.64083 W | RV Prince Madog PD06/07 |
| 753179 | Hydrography time series at depth | 2007-04-16 11:00:03 | 53.45083 N, 3.64083 W | RV Prince Madog PD06/07 |
| 862307 | Fluorescence or pigments | 2007-04-19 12:00:00 | 53.45095 N, 3.63857 W | RV Prince Madog PD06/07 |
| 862092 | Surface temp/sal | 2007-04-19 12:00:00 | 53.45095 N, 3.63857 W | RV Prince Madog PD06/07 |
| 862516 | Transmittance/attenuance, turbidity, or SPM conc. | 2007-04-19 12:00:00 | 53.45095 N, 3.63857 W | RV Prince Madog PD06/07 |
| 937551 | CTD or STD cast | 2007-04-19 12:05:00 | 53.45167 N, 3.636 W | RV Prince Madog PD06/07 |
| 752987 | Hydrography time series at depth | 2007-04-19 12:50:01 | 53.451 N, 3.6385 W | RV Prince Madog PD06/07 |
| 753051 | Hydrography time series at depth | 2007-04-19 12:50:02 | 53.451 N, 3.6385 W | RV Prince Madog PD06/07 |
| 942240 | CTD or STD cast | 2007-05-17 06:51:00 | 53.45033 N, 3.63633 W | RV Prince Madog PD09/07 |
| 1623132 | Currents -subsurface Eulerian | 2007-05-17 07:50:00 | 53.451 N, 3.6425 W | RV Prince Madog PD09/07 |
| 753192 | Hydrography time series at depth | 2007-05-17 08:00:03 | 53.451 N, 3.6425 W | RV Prince Madog PD09/07 |
| 753014 | Hydrography time series at depth | 2007-05-17 12:50:01 | 53.451 N, 3.63933 W | RV Prince Madog PD09/07 |
| 753063 | Hydrography time series at depth | 2007-05-17 12:50:01 | 53.451 N, 3.63933 W | RV Prince Madog PD09/07 |
| 942288 | CTD or STD cast | 2007-05-17 12:57:00 | 53.45217 N, 3.644 W | RV Prince Madog PD09/07 |
| 862319 | Fluorescence or pigments | 2007-05-17 13:00:00 | 53.45098 N, 3.63938 W | RV Prince Madog PD09/07 |
| 862111 | Surface temp/sal | 2007-05-17 13:00:00 | 53.45098 N, 3.63938 W | RV Prince Madog PD09/07 |
| 862528 | Transmittance/attenuance, turbidity, or SPM conc. | 2007-05-17 13:00:00 | 53.45098 N, 3.63938 W | RV Prince Madog PD09/07 |
| 943046 | CTD or STD cast | 2007-06-21 09:28:00 | 53.44983 N, 3.6415 W | RV Prince Madog PD13/07 |
| 862320 | Fluorescence or pigments | 2007-06-21 10:00:00 | 53.45295 N, 3.64237 W | RV Prince Madog PD13/07 |
| 952916 | Hydrography time series at depth | 2007-06-21 10:00:00 | 53.453 N, 3.64233 W | RV Prince Madog PD13/07 |
| 952928 | Hydrography time series at depth | 2007-06-21 10:00:00 | 53.453 N, 3.64233 W | RV Prince Madog PD13/07 |
| 862123 | Surface temp/sal | 2007-06-21 10:00:00 | 53.45295 N, 3.64237 W | RV Prince Madog PD13/07 |
| 862541 | Transmittance/attenuance, turbidity, or SPM conc. | 2007-06-21 10:00:00 | 53.45295 N, 3.64237 W | RV Prince Madog PD13/07 |
| 952873 | Hydrography time series at depth | 2007-06-21 10:00:01 | 53.453 N, 3.64233 W | RV Prince Madog PD13/07 |
| 952897 | Hydrography time series at depth | 2007-06-21 10:00:01 | 53.453 N, 3.64233 W | RV Prince Madog PD13/07 |
| 943058 | CTD or STD cast | 2007-06-21 11:45:00 | 53.45117 N, 3.63833 W | RV Prince Madog PD13/07 |
| 1623181 | Currents -subsurface Eulerian | 2007-06-21 13:30:00 | 53.45117 N, 3.64017 W | RV Prince Madog PD13/07 |
| 952848 | Hydrography time series at depth | 2007-06-21 13:30:03 | 53.45117 N, 3.64017 W | RV Prince Madog PD13/07 |
| 943427 | CTD or STD cast | 2007-07-27 09:09:00 | 53.45233 N, 3.64167 W | RV Prince Madog PD16/07 |
| 862332 | Fluorescence or pigments | 2007-07-27 14:00:00 | 53.4503 N, 3.63867 W | RV Prince Madog PD16/07 |
| 862135 | Surface temp/sal | 2007-07-27 14:00:00 | 53.4503 N, 3.63867 W | RV Prince Madog PD16/07 |
| 862553 | Transmittance/attenuance, turbidity, or SPM conc. | 2007-07-27 14:00:00 | 53.4503 N, 3.63867 W | RV Prince Madog PD16/07 |
| 946413 | Hydrography time series at depth | 2007-07-27 14:10:00 | 53.45033 N, 3.63867 W | RV Prince Madog PD16/07 |
| 946369 | Hydrography time series at depth | 2007-07-27 14:10:01 | 53.45033 N, 3.63867 W | RV Prince Madog PD16/07 |
| 946394 | Hydrography time series at depth | 2007-07-27 14:10:01 | 53.45033 N, 3.63867 W | RV Prince Madog PD16/07 |
| 1623248 | Currents -subsurface Eulerian | 2007-07-27 14:40:00 | 53.45533 N, 3.63917 W | RV Prince Madog PD16/07 |
| 946357 | Hydrography time series at depth | 2007-07-27 14:40:03 | 53.45533 N, 3.63917 W | RV Prince Madog PD16/07 |
| 943476 | CTD or STD cast | 2007-07-27 17:40:00 | 53.45083 N, 3.629 W | RV Prince Madog PD16/07 |
| 943821 | CTD or STD cast | 2007-08-30 06:29:00 | 53.45567 N, 3.63633 W | RV Prince Madog PD20/07 |
| 941445 | Hydrography time series at depth | 2007-08-30 18:40:00 | 53.44967 N, 3.64633 W | RV Prince Madog PD20/07 |
| 941421 | Hydrography time series at depth | 2007-08-30 18:40:01 | 53.44967 N, 3.64633 W | RV Prince Madog PD20/07 |
| 862344 | Fluorescence or pigments | 2007-08-30 19:00:00 | 53.4497 N, 3.64633 W | RV Prince Madog PD20/07 |
| 862147 | Surface temp/sal | 2007-08-30 19:00:00 | 53.4497 N, 3.64633 W | RV Prince Madog PD20/07 |
| 862565 | Transmittance/attenuance, turbidity, or SPM conc. | 2007-08-30 19:00:00 | 53.4497 N, 3.64633 W | RV Prince Madog PD20/07 |
| 943950 | CTD or STD cast | 2007-08-30 19:02:00 | 53.449 N, 3.6295 W | RV Prince Madog PD20/07 |
| 945760 | CTD or STD cast | 2007-10-04 07:33:00 | 53.4505 N, 3.646 W | RV Prince Madog PD23/07 |
| 862356 | Fluorescence or pigments | 2007-10-04 13:00:00 | 53.44862 N, 3.6421 W | RV Prince Madog PD23/07 |
| 767894 | Hydrography time series at depth | 2007-10-04 13:00:00 | 53.44867 N, 3.64217 W | RV Prince Madog PD23/07 |
| 862159 | Surface temp/sal | 2007-10-04 13:00:00 | 53.44862 N, 3.6421 W | RV Prince Madog PD23/07 |
| 862577 | Transmittance/attenuance, turbidity, or SPM conc. | 2007-10-04 13:00:00 | 53.44862 N, 3.6421 W | RV Prince Madog PD23/07 |
| 767845 | Hydrography time series at depth | 2007-10-04 13:00:01 | 53.44867 N, 3.64217 W | RV Prince Madog PD23/07 |
| 767857 | Hydrography time series at depth | 2007-10-04 13:00:01 | 53.44867 N, 3.64217 W | RV Prince Madog PD23/07 |
| 945803 | CTD or STD cast | 2007-10-04 13:30:00 | 53.4475 N, 3.63617 W | RV Prince Madog PD23/07 |
| 1623316 | Currents -subsurface Eulerian | 2007-10-04 13:30:00 | 53.46633 N, 3.64017 W | RV Prince Madog PD23/07 |
| 767870 | Hydrography time series at depth | 2007-10-04 13:30:03 | 53.46633 N, 3.64017 W | RV Prince Madog PD23/07 |
| 946530 | CTD or STD cast | 2007-11-21 16:18:00 | 53.44783 N, 3.63417 W | RV Prince Madog PD27/07 |
| 770576 | Hydrography time series at depth | 2007-11-21 17:00:00 | 53.4475 N, 3.64283 W | RV Prince Madog PD27/07 |
| 770588 | Hydrography time series at depth | 2007-11-21 17:00:00 | 53.4475 N, 3.64283 W | RV Prince Madog PD27/07 |
| 862368 | Fluorescence or pigments | 2007-11-21 17:30:00 | 53.44752 N, 3.64288 W | RV Prince Madog PD27/07 |
| 862160 | Surface temp/sal | 2007-11-21 17:30:00 | 53.44752 N, 3.64288 W | RV Prince Madog PD27/07 |
| 862589 | Transmittance/attenuance, turbidity, or SPM conc. | 2007-11-21 17:30:00 | 53.44752 N, 3.64288 W | RV Prince Madog PD27/07 |
| 946542 | CTD or STD cast | 2007-11-21 18:37:00 | 53.45167 N, 3.64817 W | RV Prince Madog PD27/07 |
| 770539 | Hydrography time series at depth | 2007-11-22 08:00:00 | 53.4475 N, 3.64283 W | RV Prince Madog PD27/07 |
| 770540 | Hydrography time series at depth | 2007-11-22 08:00:00 | 53.4475 N, 3.64283 W | RV Prince Madog PD27/07 |
| 946806 | CTD or STD cast | 2008-01-11 01:41:00 | 53.45167 N, 3.64517 W | RV Prince Madog PD01/08 |
| 946880 | CTD or STD cast | 2008-01-11 12:07:00 | 53.447 N, 3.63667 W | RV Prince Madog PD01/08 |
| 770472 | Hydrography time series at depth | 2008-01-11 12:20:00 | 53.44833 N, 3.64483 W | RV Prince Madog PD01/08 |
| 770484 | Hydrography time series at depth | 2008-01-11 12:20:00 | 53.44833 N, 3.64483 W | RV Prince Madog PD01/08 |
| 770423 | Hydrography time series at depth | 2008-01-11 12:20:01 | 53.44833 N, 3.64483 W | RV Prince Madog PD01/08 |
| 770447 | Hydrography time series at depth | 2008-01-11 12:20:01 | 53.44833 N, 3.64483 W | RV Prince Madog PD01/08 |
| 862381 | Fluorescence or pigments | 2008-01-11 12:30:00 | 53.44827 N, 3.64482 W | RV Prince Madog PD01/08 |
| 862172 | Surface temp/sal | 2008-01-11 12:30:00 | 53.44827 N, 3.64482 W | RV Prince Madog PD01/08 |
| 862590 | Transmittance/attenuance, turbidity, or SPM conc. | 2008-01-11 12:30:00 | 53.44827 N, 3.64482 W | RV Prince Madog PD01/08 |
| 1623027 | Currents -subsurface Eulerian | 2008-01-11 13:10:00 | 53.44967 N, 3.6415 W | RV Prince Madog PD01/08 |
| 770392 | Hydrography time series at depth | 2008-01-11 13:10:03 | 53.44967 N, 3.6415 W | RV Prince Madog PD01/08 |
| 946892 | CTD or STD cast | 2008-01-11 14:03:00 | 53.44983 N, 3.65117 W | RV Prince Madog PD01/08 |
| 947139 | CTD or STD cast | 2008-03-14 15:36:00 | 53.44933 N, 3.6395 W | RV Prince Madog PD07/08 |
| 1623119 | Currents -subsurface Eulerian | 2008-03-14 18:40:03 | 53.4495 N, 3.64217 W | RV Prince Madog PD07/08 |
| 772429 | Hydrography time series at depth | 2008-03-14 18:50:03 | 53.4495 N, 3.64217 W | RV Prince Madog PD07/08 |
| 862393 | Fluorescence or pigments | 2008-03-14 19:00:00 | 53.44827 N, 3.63855 W | RV Prince Madog PD07/08 |
| 862184 | Surface temp/sal | 2008-03-14 19:00:00 | 53.44827 N, 3.63855 W | RV Prince Madog PD07/08 |
| 862608 | Transmittance/attenuance, turbidity, or SPM conc. | 2008-03-14 19:00:00 | 53.44827 N, 3.63855 W | RV Prince Madog PD07/08 |
| 772398 | Hydrography time series at depth | 2008-03-14 19:00:01 | 53.44833 N, 3.6385 W | RV Prince Madog PD07/08 |
| 772417 | Hydrography time series at depth | 2008-03-14 19:00:01 | 53.44833 N, 3.6385 W | RV Prince Madog PD07/08 |
| 947140 | CTD or STD cast | 2008-03-14 19:34:00 | 53.448 N, 3.65333 W | RV Prince Madog PD07/08 |
| 772282 | Hydrography time series at depth | 2008-04-16 16:30:03 | 53.4495 N, 3.6415 W | RV Prince Madog PD09/08 |
| 1623144 | Currents -subsurface Eulerian | 2008-04-16 16:30:06 | 53.4495 N, 3.6415 W | RV Prince Madog PD09/08 |
| 947268 | CTD or STD cast | 2008-04-16 16:36:00 | 53.448 N, 3.63917 W | RV Prince Madog PD09/08 |
| 1082205 | Fluorescence or pigments | 2008-04-16 17:00:00 | 53.45 N, 3.64 W | RV Prince Madog PD09/08 |
| 772301 | Hydrography time series at depth | 2008-04-16 17:00:00 | 53.4465 N, 3.63733 W | RV Prince Madog PD09/08 |
| 772325 | Hydrography time series at depth | 2008-04-16 17:00:00 | 53.4465 N, 3.63733 W | RV Prince Madog PD09/08 |
| 772350 | Hydrography time series at depth | 2008-04-16 17:00:00 | 53.4465 N, 3.63733 W | RV Prince Madog PD09/08 |
| 772362 | Hydrography time series at depth | 2008-04-16 17:00:00 | 53.4465 N, 3.63733 W | RV Prince Madog PD09/08 |
| 1082186 | Hydrography time series at depth | 2008-04-16 17:00:00 | 53.45 N, 3.64 W | RV Prince Madog PD09/08 |
| 1082266 | Transmittance/attenuance, turbidity, or SPM conc. | 2008-04-16 17:00:00 | 53.45 N, 3.64 W | RV Prince Madog PD09/08 |
| 947281 | CTD or STD cast | 2008-04-16 17:32:00 | 53.45017 N, 3.62983 W | RV Prince Madog PD09/08 |
| 948247 | CTD or STD cast | 2008-05-15 14:00:00 | 53.449 N, 3.6485 W | RV Prince Madog PD14/08 |
| 838307 | Hydrography time series at depth | 2008-05-15 14:50:03 | 53.44983 N, 3.64133 W | RV Prince Madog PD14/08 |
| 1623200 | Currents -subsurface Eulerian | 2008-05-15 14:50:47 | 53.44983 N, 3.64133 W | RV Prince Madog PD14/08 |
| 838320 | Hydrography time series at depth | 2008-05-15 15:10:00 | 53.4495 N, 3.63883 W | RV Prince Madog PD14/08 |
| 838344 | Hydrography time series at depth | 2008-05-15 15:10:00 | 53.4495 N, 3.63883 W | RV Prince Madog PD14/08 |
| 838381 | Hydrography time series at depth | 2008-05-15 15:10:00 | 53.4495 N, 3.63883 W | RV Prince Madog PD14/08 |
| 1082217 | Fluorescence or pigments | 2008-05-15 15:30:00 | 53.45 N, 3.64 W | RV Prince Madog PD14/08 |
| 1082198 | Hydrography time series at depth | 2008-05-15 15:30:00 | 53.45 N, 3.64 W | RV Prince Madog PD14/08 |
| 1082278 | Transmittance/attenuance, turbidity, or SPM conc. | 2008-05-15 15:30:00 | 53.45 N, 3.64 W | RV Prince Madog PD14/08 |
| 948259 | CTD or STD cast | 2008-05-15 15:50:00 | 53.447 N, 3.62967 W | RV Prince Madog PD14/08 |
| 948573 | CTD or STD cast | 2008-06-25 17:51:00 | 53.45233 N, 3.649 W | RV Prince Madog PD19/08 |
| 857876 | Hydrography time series at depth | 2008-06-25 19:10:03 | 53.452 N, 3.64333 W | RV Prince Madog PD19/08 |
| 949484 | CTD or STD cast | 2008-07-31 08:01:00 | 53.4485 N, 3.63583 W | RV Prince Madog PD23/08 |
| 857919 | Hydrography time series at depth | 2008-07-31 08:50:00 | 53.44817 N, 3.6455 W | RV Prince Madog PD23/08 |
| 857920 | Hydrography time series at depth | 2008-07-31 08:50:00 | 53.44817 N, 3.6455 W | RV Prince Madog PD23/08 |
| 1024614 | Fluorescence or pigments | 2008-07-31 09:00:00 | 53.45 N, 3.65 W | RV Prince Madog PD23/08 |
| 1024534 | Surface temp/sal | 2008-07-31 09:00:00 | 53.45 N, 3.65 W | RV Prince Madog PD23/08 |
| 1024699 | Transmittance/attenuance, turbidity, or SPM conc. | 2008-07-31 09:00:00 | 53.45 N, 3.65 W | RV Prince Madog PD23/08 |
| 949496 | CTD or STD cast | 2008-07-31 09:22:00 | 53.45033 N, 3.63933 W | RV Prince Madog PD23/08 |
| 1024626 | Fluorescence or pigments | 2008-09-10 17:30:00 | 53.448 N, 3.6422 W | RV Prince Madog PD29/08 |
| 939300 | Hydrography time series at depth | 2008-09-10 17:30:00 | 53.44817 N, 3.644 W | RV Prince Madog PD29/08 |
| 939312 | Hydrography time series at depth | 2008-09-10 17:30:00 | 53.44817 N, 3.644 W | RV Prince Madog PD29/08 |
| 1024546 | Surface temp/sal | 2008-09-10 17:30:00 | 53.448 N, 3.6422 W | RV Prince Madog PD29/08 |
| 1024706 | Transmittance/attenuance, turbidity, or SPM conc. | 2008-09-10 17:30:00 | 53.448 N, 3.6422 W | RV Prince Madog PD29/08 |
| 939232 | Hydrography time series at depth | 2008-09-10 17:30:01 | 53.44817 N, 3.644 W | RV Prince Madog PD29/08 |
| 939244 | Hydrography time series at depth | 2008-09-10 17:30:01 | 53.44817 N, 3.644 W | RV Prince Madog PD29/08 |
| 939219 | Hydrography time series at depth | 2008-09-11 08:00:03 | 53.45017 N, 3.64333 W | RV Prince Madog PD29/08 |
| 949724 | CTD or STD cast | 2008-10-22 19:46:00 | 53.44983 N, 3.64433 W | RV Prince Madog PD33/08 |
| 950123 | CTD or STD cast | 2008-12-11 12:27:00 | 53.44983 N, 3.65 W | RV Prince Madog PD37/08 |
| 1022865 | Hydrography time series at depth | 2008-12-11 13:40:03 | 53.44983 N, 3.644 W | RV Prince Madog PD37/08 |
| 1623691 | Currents -subsurface Eulerian | 2008-12-11 13:44:59 | 53.44983 N, 3.644 W | RV Prince Madog PD37/08 |
| 1024638 | Fluorescence or pigments | 2008-12-11 14:00:00 | 53.4502 N, 3.6463 W | RV Prince Madog PD37/08 |
| 1022969 | Hydrography time series at depth | 2008-12-11 14:00:00 | 53.45017 N, 3.64633 W | RV Prince Madog PD37/08 |
| 1022970 | Hydrography time series at depth | 2008-12-11 14:00:00 | 53.45017 N, 3.64633 W | RV Prince Madog PD37/08 |
| 1024558 | Surface temp/sal | 2008-12-11 14:00:00 | 53.4502 N, 3.6463 W | RV Prince Madog PD37/08 |
| 1024718 | Transmittance/attenuance, turbidity, or SPM conc. | 2008-12-11 14:00:00 | 53.4502 N, 3.6463 W | RV Prince Madog PD37/08 |
| 1022908 | Hydrography time series at depth | 2008-12-11 14:00:01 | 53.45017 N, 3.64633 W | RV Prince Madog PD37/08 |
| 1022921 | Hydrography time series at depth | 2008-12-11 14:00:01 | 53.45017 N, 3.64633 W | RV Prince Madog PD37/08 |
| 950135 | CTD or STD cast | 2008-12-11 14:31:00 | 53.44967 N, 3.64783 W | RV Prince Madog PD37/08 |
| 950227 | CTD or STD cast | 2009-02-05 12:54:00 | 53.44867 N, 3.64633 W | RV Prince Madog PD02/09B |
| 1048376 | Hydrography time series at depth | 2009-02-05 13:50:03 | 53.44967 N, 3.6435 W | RV Prince Madog PD02/09B |
| 1048481 | Hydrography time series at depth | 2009-02-05 14:10:00 | 53.45183 N, 3.6455 W | RV Prince Madog PD02/09B |
| 1048493 | Hydrography time series at depth | 2009-02-05 14:10:00 | 53.45183 N, 3.6455 W | RV Prince Madog PD02/09B |
| 1048444 | Hydrography time series at depth | 2009-02-05 14:10:01 | 53.45183 N, 3.6455 W | RV Prince Madog PD02/09B |
| 1048432 | Hydrography time series at depth | 2009-02-05 14:10:02 | 53.45183 N, 3.6455 W | RV Prince Madog PD02/09B |
| 950239 | CTD or STD cast | 2009-02-05 14:27:00 | 53.449 N, 3.646 W | RV Prince Madog PD02/09B |
| 1024651 | Fluorescence or pigments | 2009-02-05 14:30:00 | 53.4518 N, 3.64542 W | RV Prince Madog PD02/09B |
| 1024571 | Surface temp/sal | 2009-02-05 14:30:00 | 53.4518 N, 3.64542 W | RV Prince Madog PD02/09B |
| 1024731 | Transmittance/attenuance, turbidity, or SPM conc. | 2009-02-05 14:30:00 | 53.4518 N, 3.64542 W | RV Prince Madog PD02/09B |
| 950541 | CTD or STD cast | 2009-02-06 13:51:00 | 53.44967 N, 3.64283 W | RV Prince Madog PD02/09B |
| 951519 | CTD or STD cast | 2009-04-02 07:39:00 | 53.4515 N, 3.65083 W | RV Prince Madog PD12/09 |
| 1640737 | Hydrography time series at depth | 2009-04-02 08:43:06 | 53.4495 N, 3.6435 W | RV Prince Madog PD12/09 |
| 1623746 | Currents -subsurface Eulerian | 2009-04-02 08:45:00 | 53.4495 N, 3.6435 W | RV Prince Madog PD12/09 |
| 1640774 | Hydrography time series at depth | 2009-04-02 08:50:00 | 53.45067 N, 3.641 W | RV Prince Madog PD12/09 |
| 1640786 | Hydrography time series at depth | 2009-04-02 08:50:00 | 53.45067 N, 3.641 W | RV Prince Madog PD12/09 |
| 1640694 | Hydrography time series at depth | 2009-04-02 08:50:01 | 53.45067 N, 3.641 W | RV Prince Madog PD12/09 |
| 1640725 | Hydrography time series at depth | 2009-04-02 08:50:01 | 53.45067 N, 3.641 W | RV Prince Madog PD12/09 |
| 951520 | CTD or STD cast | 2009-04-02 09:21:00 | 53.45133 N, 3.6545 W | RV Prince Madog PD12/09 |
| 1075638 | Fluorescence or pigments | 2009-04-02 10:00:00 | 53.4507 N, 3.641 W | RV Prince Madog PD12/09 |
| 1075510 | Hydrography time series at depth | 2009-04-02 10:00:00 | 53.4507 N, 3.641 W | RV Prince Madog PD12/09 |
| 1076076 | Transmittance/attenuance, turbidity, or SPM conc. | 2009-04-02 10:00:00 | 53.4507 N, 3.641 W | RV Prince Madog PD12/09 |
| 953760 | CTD or STD cast | 2009-05-13 05:18:00 | 53.45017 N, 3.65 W | RV Prince Madog PD18/09 |
| 1640830 | Hydrography time series at depth | 2009-05-13 07:40:03 | 53.44967 N, 3.641 W | RV Prince Madog PD18/09 |
| 1623955 | Currents -subsurface Eulerian | 2009-05-13 07:45:00 | 53.44967 N, 3.641 W | RV Prince Madog PD18/09 |
| 1640805 | Hydrography time series at depth | 2009-05-14 06:10:00 | 53.4515 N, 3.63917 W | RV Prince Madog PD18/09 |
| 1640829 | Hydrography time series at depth | 2009-05-14 06:10:00 | 53.4515 N, 3.63917 W | RV Prince Madog PD18/09 |
| 1640878 | Hydrography time series at depth | 2009-05-14 06:10:00 | 53.4515 N, 3.63917 W | RV Prince Madog PD18/09 |
| 953876 | CTD or STD cast | 2009-05-14 06:13:00 | 53.45067 N, 3.64383 W | RV Prince Madog PD18/09 |
| 1075651 | Fluorescence or pigments | 2009-05-14 06:30:00 | 53.4515 N, 3.6392 W | RV Prince Madog PD18/09 |
| 1075522 | Hydrography time series at depth | 2009-05-14 06:30:00 | 53.4515 N, 3.6392 W | RV Prince Madog PD18/09 |
| 1076088 | Transmittance/attenuance, turbidity, or SPM conc. | 2009-05-14 06:30:00 | 53.4515 N, 3.6392 W | RV Prince Madog PD18/09 |
| 1023070 | CTD or STD cast | 2009-06-17 16:20:00 | 53.44733 N, 3.64217 W | RV Prince Madog PD24/09 |
| 1023278 | CTD or STD cast | 2009-06-18 10:05:00 | 53.4495 N, 3.64167 W | RV Prince Madog PD24/09 |
| 1640922 | Hydrography time series at depth | 2009-06-18 12:20:03 | 53.44983 N, 3.64133 W | RV Prince Madog PD24/09 |
| 1623642 | Currents -subsurface Eulerian | 2009-06-18 12:25:00 | 53.44983 N, 3.64133 W | RV Prince Madog PD24/09 |
| 1023291 | CTD or STD cast | 2009-06-18 12:31:00 | 53.4525 N, 3.63567 W | RV Prince Madog PD24/09 |
| 1023334 | CTD or STD cast | 2009-08-02 22:17:00 | 53.44933 N, 3.64 W | RV Prince Madog PD33/09 |
| 1023463 | CTD or STD cast | 2009-08-03 11:37:00 | 53.44967 N, 3.64083 W | RV Prince Madog PD33/09 |
| 1623992 | Currents -subsurface Eulerian | 2009-08-03 12:35:03 | 53.44967 N, 3.64117 W | RV Prince Madog PD33/09 |
| 1641010 | Hydrography time series at depth | 2009-08-03 12:40:03 | 53.44967 N, 3.64117 W | RV Prince Madog PD33/09 |
| 1075663 | Fluorescence or pigments | 2009-08-03 13:30:00 | 53.449 N, 3.6427 W | RV Prince Madog PD33/09 |
| 1075534 | Hydrography time series at depth | 2009-08-03 13:30:00 | 53.449 N, 3.6427 W | RV Prince Madog PD33/09 |
| 1641046 | Hydrography time series at depth | 2009-08-03 13:30:00 | 53.449 N, 3.64267 W | RV Prince Madog PD33/09 |
| 1641058 | Hydrography time series at depth | 2009-08-03 13:30:00 | 53.449 N, 3.64267 W | RV Prince Madog PD33/09 |
| 1076107 | Transmittance/attenuance, turbidity, or SPM conc. | 2009-08-03 13:30:00 | 53.449 N, 3.6427 W | RV Prince Madog PD33/09 |
| 1640971 | Hydrography time series at depth | 2009-08-03 13:30:01 | 53.449 N, 3.64267 W | RV Prince Madog PD33/09 |
| 1640983 | Hydrography time series at depth | 2009-08-03 13:30:01 | 53.449 N, 3.64267 W | RV Prince Madog PD33/09 |
| 1023475 | CTD or STD cast | 2009-08-03 13:57:00 | 53.45217 N, 3.644 W | RV Prince Madog PD33/09 |
| 1024386 | CTD or STD cast | 2009-09-16 08:23:00 | 53.44817 N, 3.6455 W | RV Prince Madog PD38/09 |
| 1641126 | Hydrography time series at depth | 2009-09-16 09:30:03 | 53.4495 N, 3.64117 W | RV Prince Madog PD38/09 |
| 1623826 | Currents -subsurface Eulerian | 2009-09-16 09:34:59 | 53.4495 N, 3.64117 W | RV Prince Madog PD38/09 |
| 1641163 | Hydrography time series at depth | 2009-09-16 09:40:00 | 53.44933 N, 3.63917 W | RV Prince Madog PD38/09 |
| 1641175 | Hydrography time series at depth | 2009-09-16 09:40:00 | 53.44933 N, 3.63917 W | RV Prince Madog PD38/09 |
| 1641083 | Hydrography time series at depth | 2009-09-16 09:40:01 | 53.44933 N, 3.63917 W | RV Prince Madog PD38/09 |
| 1641102 | Hydrography time series at depth | 2009-09-16 09:40:02 | 53.44933 N, 3.63917 W | RV Prince Madog PD38/09 |
| 1024398 | CTD or STD cast | 2009-09-16 10:05:00 | 53.45183 N, 3.64367 W | RV Prince Madog PD38/09 |
| 1024454 | CTD or STD cast | 2009-09-16 14:49:00 | 53.45133 N, 3.64183 W | RV Prince Madog PD38/09 |
| 1030318 | CTD or STD cast | 2009-12-02 14:57:00 | 53.45067 N, 3.647 W | RV Prince Madog PD47/09 |
| 1641243 | Hydrography time series at depth | 2009-12-02 16:10:03 | 53.45 N, 3.64183 W | RV Prince Madog PD47/09 |
| 1623906 | Currents -subsurface Eulerian | 2009-12-02 16:15:00 | 53.45 N, 3.64183 W | RV Prince Madog PD47/09 |
| 1075675 | Fluorescence or pigments | 2009-12-02 18:30:00 | 53.45 N, 3.6388 W | RV Prince Madog PD47/09 |
| 1075546 | Hydrography time series at depth | 2009-12-02 18:30:00 | 53.45 N, 3.6388 W | RV Prince Madog PD47/09 |
| 1641279 | Hydrography time series at depth | 2009-12-02 18:30:00 | 53.45 N, 3.63883 W | RV Prince Madog PD47/09 |
| 1641280 | Hydrography time series at depth | 2009-12-02 18:30:00 | 53.45 N, 3.63883 W | RV Prince Madog PD47/09 |
| 1076119 | Transmittance/attenuance, turbidity, or SPM conc. | 2009-12-02 18:30:00 | 53.45 N, 3.6388 W | RV Prince Madog PD47/09 |
| 1641199 | Hydrography time series at depth | 2009-12-02 18:30:01 | 53.45 N, 3.63883 W | RV Prince Madog PD47/09 |
| 1641218 | Hydrography time series at depth | 2009-12-02 18:30:01 | 53.45 N, 3.63883 W | RV Prince Madog PD47/09 |
| 1030331 | CTD or STD cast | 2009-12-02 18:52:00 | 53.4515 N, 3.631 W | RV Prince Madog PD47/09 |
| 1030392 | CTD or STD cast | 2010-01-26 13:53:00 | 53.45167 N, 3.643 W | RV Prince Madog PD02/10 |
| 1090623 | CTD or STD cast | 2010-06-10 11:09:00 | 53.44917 N, 3.645 W | RV Prince Madog PD17/10 |
| 1641716 | Hydrography time series at depth | 2010-06-10 18:20:00 | 53.45717 N, 3.63883 W | RV Prince Madog PD17/10 |
| 1641648 | Hydrography time series at depth | 2010-06-10 18:20:01 | 53.45717 N, 3.63883 W | RV Prince Madog PD17/10 |
| 1641661 | Hydrography time series at depth | 2010-06-10 18:20:01 | 53.45717 N, 3.63883 W | RV Prince Madog PD17/10 |
| 1641728 | Hydrography time series at depth | 2010-06-10 19:10:00 | 53.45717 N, 3.63883 W | RV Prince Madog PD17/10 |
| 1090819 | CTD or STD cast | 2010-07-07 16:34:00 | 53.4505 N, 3.63883 W | RV Prince Madog PD21/10 |
| 1112362 | CTD or STD cast | 2010-08-12 12:59:00 | 53.45083 N, 3.64233 W | RV Prince Madog PD29/10 |
| 1114264 | CTD or STD cast | 2010-09-29 13:52:00 | 53.44933 N, 3.63883 W | RV Prince Madog PD36/10 |
| 1140965 | CTD or STD cast | 2010-12-07 17:35:00 | 53.45017 N, 3.64667 W | RV Prince Madog PD49/10 |
| 1149147 | CTD or STD cast | 2011-01-13 14:11:00 | 53.4505 N, 3.6415 W | RV Prince Madog PD01/11 |
| 1150020 | CTD or STD cast | 2011-03-17 14:53:00 | 53.4495 N, 3.64333 W | RV Prince Madog PD07/11 |
| 1117169 | CTD or STD cast | 2011-04-20 19:29:00 | 53.45167 N, 3.64067 W | RV Prince Madog PD11/11 |
| 1118714 | CTD or STD cast | 2011-06-07 03:07:00 | 53.45233 N, 3.64417 W | RV Prince Madog PD43/11 |
