Metadata Report for BODC Series Reference Number 669549
Metadata Summary
Problem Reports
Data Access Policy
Narrative Documents
Project Information
Data Activity or Cruise Information
Fixed Station Information
BODC Quality Flags
SeaDataNet Quality Flags
Metadata Summary
Data Description |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Data Identifiers |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Time Co-ordinates(UT) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Spatial Co-ordinates | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Parameters |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Problem Reports
No Problem Report Found in the Database
RAPID Cruise D279 150KHZ VMADCP Data Quality Report
Data visually inspected and found to be of good quality, with only a few isolated data spikes flagged.
Data Access Policy
Open Data
These data have no specific confidentiality restrictions for users. However, users must acknowledge data sources as it is not ethical to publish data without proper attribution. Any publication or other output resulting from usage of the data should include an acknowledgment.
If the Information Provider does not provide a specific attribution statement, or if you are using Information from several Information Providers and multiple attributions are not practical in your product or application, you may consider using the following:
"Contains public sector information licensed under the Open Government Licence v1.0."
Narrative Documents
RD Instruments- Ocean Surveyor 150kHz Vessel mounted ADCP.
| Long-Range Mode | ||
|---|---|---|
| Vertical Resolution Cell Size3 | Max. Range (m)1 | Precision (cm/s)2 |
| 4m | 325 - 350 | 30 |
| 8m | 375 - 400 | 19 |
| High-Precision Mode | ||
| Vertical Resolution Cell Size3 | Max.Range (m)1 | Precision (cm/s)2 |
| 4m | 200 - 250 | 12 |
| 8m | 220 - 275 | 9 |
1 Ranges at 1 to 5 knots ship speed are typical and vary with situation.
2 Single-ping standard deviation.
3 User's choice of depth cell size is not limited to the typical values specified.
Profile Parameters
- Velocity long-term accuracy (typical): ±1.0%, ±0.5cm/s
- Velocity range: -5 to 9m/s
- # of depth cells: 1 - 128
- Max ping rate: 1.5
Bottom Track
Maximum altitude (precision <2cm/s): 600m
Echo Intensity Profile
Dynamic range: 80dB
Precision: ±1.5dB
Transducer & Hardware
Beam angle: 30°
Configuration: 4-beam phased array
Communications: RS-232 or RS-422 hex-ASCII or binary output at 1200 - 115,200 baud
Output power: 1000W
Standard Sensors
Temperature (mounted on transducer)
- Range: -5° to 45°C
- Precision: ±0.1°C
- Resolution: 0.03°
Environmental
Operating temperature: -5° to 40°C (-5° to 45°C)*
Storage temperature: -30° to 50°C (-30° to 60°C)*
*later instruments have greater range.
Web Page
Further details can be found in the manufacturer's website or in the specification sheet.
RAPID D279 150kHz VMADCP processing
Configuration
The adcp is mounted 1.75m port of the keel, 33m aft of the bow and at a depth of approximately 5m.
Data were logged using IBM DAS. The 150kHz ADCP was configured to sample over 120 second intervals, with 64 bins of 8m thickness, and a blank beyond transmit of 4m. Where shallow water was encountered, the ADCP was operated in bottom track (BT) mode, otherwise it was operated in water track (noBT) mode.
Data Originator's Processing
-
Data acquisition
Data were processed using the following scripts:
-
adpexec0: read raw data into P* format from the RVS level C; split into gridded depth dependent and non-gridded depth independent files; scale velocities to cm/s and amplitudes by 0.45 into dB; perform nominal edits and adjust bin depths to correct levels.
-
adpexec1: correct data timebase.
-
adpexec2_clock: merge data with Ashtech-gyro difference file and correct headings.
-
adpexec3: apply calibration values to the velocities, scaling speed by A and rotating directions by phi.
-
adpexec4: calculate absolute velocities by merging with bestnav navigation data and removing ship's speed over ground.
-
-
Clock correction
The ADCP uses its own clock that drifts by a few seconds per day. To correct this to match the ship's master clock, careful track was kept of the deviations between the two clocks. Data were processed in daily chunks and the clock corrections applied by linear interpolation from selected values spanning the day.
-
Calibration
Calibration was undertaken using the following procedure:
- run through the normal processing steps as described above, with A=1 and phi=0 in adpexec3
- convert bottomew/bottomns into speed and direction
- convert ve/vn into speed and direction
- calculate A (=shipspd/botspd) and phi (=shipdirn-botdirn)
- select a valid subset of data and calculate mean A and phi
The calibration of the instrument relies on the collection of bottom track data, where the velocity of the bottom relative to the ship can be measured in water depths less than 1000m. This reduces the amount of data collected in the rest of the water column and therefore increases the noise in the measurements. Consequently, the instrument is swapped into bottom tracking mode only when appropriate.
It was noted that plots of absolute velocity vectors against time showed clear differences between on and off station. This is an indication of poor calibration. Examination of all bottom track data assembled together produced inconsistent estimates for A and phi. Consequently, because of the quality of the calibration for the 75kHz, it was decided to use that instrument to calibrate the 150kHz.
Comparison of aveaged relative velocities from the 150kHz and 75kHz ADCPs led to correction terms: dA = 0.985 (0.0142,104) and dphi = 0.0887 (0.71,94) and therefore an overall set of values of A = 0.9977 and phi = -0.2807.
-
Performance
Considerable problems were encountered in switching the ADCP on at the start of the cruise. On restart the slave synchronisation instruction was omitted and bottom tracking was permanently on.
BODC post-processing and screening
-
Reformatting
The data were converted from P* format into BODC internal format (QXF) to allow use of in-house visualisation tools.
-
Screening
Reformatted data were visually checked using the in-house editor EDSERPLO. No data values were edited or deleted. Flagging was achieved by modification of the associated quality control flag to 'M' for suspect values and 'N' for nulls.
-
Banking
Once quality control screening was complete, the data were archived in the BODC National Oceanographic Database and the associated metadata were loaded into an ORACLE Relational Database Management System.
Project Information
No Project Information held for the Series
Data Activity or Cruise Information
Cruise
| Cruise Name | D279 |
| Departure Date | 2004-04-04 |
| Arrival Date | 2004-05-10 |
| Principal Scientist(s) | Stuart A Cunningham (Southampton Oceanography Centre) |
| Ship | RRS Discovery |
Complete Cruise Metadata Report is available here
Fixed Station Information
Fixed Station Information
| Station Name | 24.5 degrees N Hydrographic Transatlantic section - A05 |
| Category | Offshore route/traverse |
24.5 degrees N Hydrographic Transatlantic section - A05
The hydrographic transatlantic section at 24.5 degrees North has been occupied 8 times, namely in 1957, 1981, 1992, 1998, 2004, 2010, 2015 and 2020. The section is an attempt to calculate the transports of water and its constituents (heat, salinity, nutrients, biological productivity) along this latitude, and to compare the data so that the degree of change in the North Atlantic transports can be revealed. The Hydrographic Programme of the international World Ocean Circulation Experiment (WOCE) designated this section as A05. Since WOCE, the section occupations contribute to the Global Ocean Ship-Based Hydrographic Investigations Program (GO-SHIP).
Map of stations
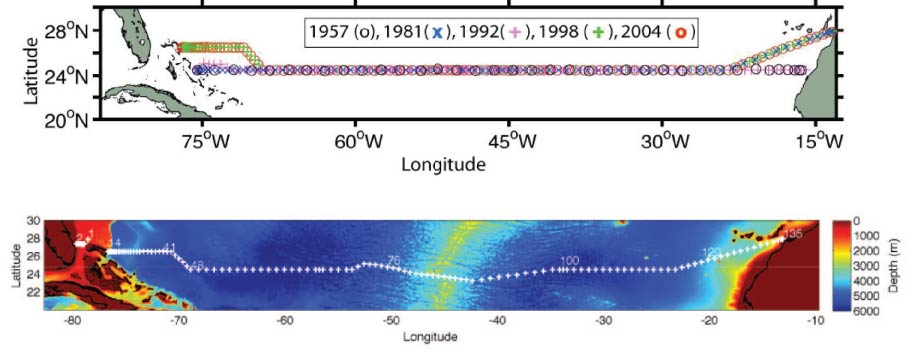
The station positions for most of the occupied sections are shown in the above figures. Sections occupied in 1957, 1981, 1992, 1998 and 2004 are shown in the upper figure. The section occupied in 2010 is shown in the lower figure.
The 1957 and 1992 sections each went zonally along 24.5 degrees N from the African coast to the Bahama Islands. Because of diplomatic clearance issues, the 1981, 1998, 2004, 2010 and 2015 sections angled southwestward from the African coast at about 28 degrees N to join the 24.5 degrees N section at about 23 degrees W. The 1998, 2004 and 2010 sections angled northwestward at about 73 degrees W to finish the section along 26.5 degrees N. The 2010 and 2020 sections deviated from the previous sections across the Mid-Atlantic Ridge (MAR) in order to sample the deepest channel and capture the passage of the deep water across the MAR.
Table 1: Occupations of the section
| Year | Cruise | Reference |
|---|---|---|
| 1957 | - | Fuglister (1960) |
| 1981 | - | Roemmich and Wunsch (1985) |
| 1992 | RV Hesperides HE06 | Parilla et al. (1994) |
| 1998 | RV Ronald H. Brown | Baringer and Molinari (1999) |
| 2004 | RRS Discovery D279 | Bryden et al. (2005b) |
| 2010 | RRS Discovery D346 | King et al. (2012) |
| 2015 | RRS Discovery DY040 | King et al. (2016) |
| 2020 | RRS James Cook JC191 | Sanchez-Franks, A. (2020) |
References
Baringer, M. O. N. and R. L. Molinari, 1999. Atlantic Ocean baroclinic heat flux at 24 to 26°N. Geophysical Research Letters, 26, 353-356.
Bryden, H. L., H. R. Longworth, and S. Cunningham, 2005b. Slowing of the Atlantic meridional overturning circulation at 25°N. Nature, 438, 655-657.
Fuglister, F. C., 1960. Atlantic Ocean Atlas of Temperature and Salinity Profiles and Data from the International Geophysical Year of 1957-1958. Vol. 1, Woods Hole Oceanographic Institution Atlas Series, WHOI, Woods Hole, Massachusetts.
King, B. A. et al., 2012. RRS Discovery Cruise 346, 05 Jan-19 Feb 2010. The 2010 transatlantic hydrography section at 24.5N. Southampton, UK, National Oceanography Centre Southampton, 177pp. (National Oceanography Centre Cruise Report, No. 16).
King, B. A. et al., 2016. RRS Discovery Cruise DY040 (RAGNARoCC), 06 Dec 2015 - 22 Jan 2016. The 2015 transatlantic hydrography section at 24.5N. Southampton, UK, National Oceanography Centre Southampton, 159pp. (National Oceanography Centre Cruise Report).
Parilla, G., A.Lavin, H. Bryden, M. Garcia, and R. Millard, 1994. Rising temperatures in the subtropical North Atlantic Ocean over the past 35 years. Nature, 369, 48-51.
Roemmich, D. and C. Wunsch, 1985. Two transatlantic sections: meridional circulation and heat flux in the subtropical North Atlantic Ocean. Deep Sea Research, 32, 619-664.
Sanchez-Franks, A., 2020. RRS James Cook Cruise JC191, 19 January - 1 March 2020. Hydrographic sections from the Florida Straits to the Canaries Current across 24N in the Atlantic Ocean. Southampton, UK, National Oceanography Centre Southampton, 262pp. (National Oceanography Centre Cruise Report, No. 70).
Related Fixed Station activities are detailed in Appendix 1
BODC Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| Blank | Unqualified |
| < | Below detection limit |
| > | In excess of quoted value |
| A | Taxonomic flag for affinis (aff.) |
| B | Beginning of CTD Down/Up Cast |
| C | Taxonomic flag for confer (cf.) |
| D | Thermometric depth |
| E | End of CTD Down/Up Cast |
| G | Non-taxonomic biological characteristic uncertainty |
| H | Extrapolated value |
| I | Taxonomic flag for single species (sp.) |
| K | Improbable value - unknown quality control source |
| L | Improbable value - originator's quality control |
| M | Improbable value - BODC quality control |
| N | Null value |
| O | Improbable value - user quality control |
| P | Trace/calm |
| Q | Indeterminate |
| R | Replacement value |
| S | Estimated value |
| T | Interpolated value |
| U | Uncalibrated |
| W | Control value |
| X | Excessive difference |
SeaDataNet Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| 0 | no quality control |
| 1 | good value |
| 2 | probably good value |
| 3 | probably bad value |
| 4 | bad value |
| 5 | changed value |
| 6 | value below detection |
| 7 | value in excess |
| 8 | interpolated value |
| 9 | missing value |
| A | value phenomenon uncertain |
| B | nominal value |
| Q | value below limit of quantification |
Appendix 1: 24.5 degrees N Hydrographic Transatlantic section - A05
Related series for this Fixed Station are presented in the table below. Further information can be found by following the appropriate links.
If you are interested in these series, please be aware we offer a multiple file download service. Should your credentials be insufficient for automatic download, the service also offers a referral to our Enquiries Officer who may be able to negotiate access.
| Series Identifier | Data Category | Start date/time | Start position | Cruise |
|---|---|---|---|---|
| 670065 | Currents -subsurface Eulerian | 2004-04-04 15:03:48 | 26.52083 N, 78.76967 W | RRS Discovery D279 |
| 669236 | Currents -subsurface Eulerian | 2004-04-04 16:25:05 | 26.49567 N, 78.86267 W | RRS Discovery D279 |
| 808729 | Bathymetry | 2004-04-04 16:43:00 | 26.4933 N, 78.9181 W | RRS Discovery D279 |
| 808717 | Meteorology -unspecified | 2004-04-04 16:43:00 | 26.4933 N, 78.9181 W | RRS Discovery D279 |
| 808705 | Surface temp/sal | 2004-04-04 16:43:00 | 26.4933 N, 78.9181 W | RRS Discovery D279 |
| 1058174 | CTD or STD cast | 2004-04-04 17:51:00 | 26.48517 N, 79.005 W | RRS Discovery D279 |
| 669248 | Currents -subsurface Eulerian | 2004-04-05 00:00:08 | 27.0 N, 79.385 W | RRS Discovery D279 |
| 670077 | Currents -subsurface Eulerian | 2004-04-05 00:01:51 | 27.0 N, 79.38733 W | RRS Discovery D279 |
| 1058186 | CTD or STD cast | 2004-04-05 06:21:00 | 27.01383 N, 79.93633 W | RRS Discovery D279 |
| 1261135 | Water sample data | 2004-04-05 06:30:30 | 27.01383 N, 79.93636 W | RRS Discovery D279 |
| 1058198 | CTD or STD cast | 2004-04-05 08:25:00 | 27.02917 N, 79.8625 W | RRS Discovery D279 |
| 1261147 | Water sample data | 2004-04-05 08:39:30 | 27.02919 N, 79.86256 W | RRS Discovery D279 |
| 1058205 | CTD or STD cast | 2004-04-05 10:11:00 | 27.0175 N, 79.77617 W | RRS Discovery D279 |
| 1261159 | Water sample data | 2004-04-05 10:29:00 | 27.01755 N, 79.7761 W | RRS Discovery D279 |
| 1058217 | CTD or STD cast | 2004-04-05 12:50:00 | 27.01467 N, 79.6825 W | RRS Discovery D279 |
| 1261160 | Water sample data | 2004-04-05 13:13:00 | 27.01469 N, 79.68244 W | RRS Discovery D279 |
| 1058229 | CTD or STD cast | 2004-04-05 15:45:00 | 27.01533 N, 79.6175 W | RRS Discovery D279 |
| 1261172 | Water sample data | 2004-04-05 16:03:30 | 27.01531 N, 79.61749 W | RRS Discovery D279 |
| 1058230 | CTD or STD cast | 2004-04-05 18:39:00 | 27.0155 N, 79.5035 W | RRS Discovery D279 |
| 1261184 | Water sample data | 2004-04-05 19:04:00 | 27.01549 N, 79.50347 W | RRS Discovery D279 |
| 1058242 | CTD or STD cast | 2004-04-05 21:15:00 | 27.01483 N, 79.388 W | RRS Discovery D279 |
| 1261196 | Water sample data | 2004-04-05 21:34:00 | 27.01489 N, 79.38806 W | RRS Discovery D279 |
| 1058254 | CTD or STD cast | 2004-04-05 23:26:00 | 27.00067 N, 79.28067 W | RRS Discovery D279 |
| 1261203 | Water sample data | 2004-04-05 23:45:00 | 27.00061 N, 79.28068 W | RRS Discovery D279 |
| 669261 | Currents -subsurface Eulerian | 2004-04-06 00:00:08 | 27.00333 N, 79.28133 W | RRS Discovery D279 |
| 670089 | Currents -subsurface Eulerian | 2004-04-06 00:01:57 | 27.00367 N, 79.2815 W | RRS Discovery D279 |
| 1058266 | CTD or STD cast | 2004-04-06 01:40:00 | 26.99867 N, 79.19433 W | RRS Discovery D279 |
| 1261215 | Water sample data | 2004-04-06 01:54:00 | 26.9986 N, 79.19434 W | RRS Discovery D279 |
| 1058278 | CTD or STD cast | 2004-04-06 17:39:00 | 26.507 N, 76.92733 W | RRS Discovery D279 |
| 669273 | Currents -subsurface Eulerian | 2004-04-07 00:00:11 | 25.887 N, 77.46883 W | RRS Discovery D279 |
| 670090 | Currents -subsurface Eulerian | 2004-04-07 08:50:31 | 26.38083 N, 78.58417 W | RRS Discovery D279 |
| 1058291 | CTD or STD cast | 2004-04-07 20:51:00 | 26.508 N, 76.92733 W | RRS Discovery D279 |
| 1261227 | Water sample data | 2004-04-07 20:55:30 | 26.50796 N, 76.92735 W | RRS Discovery D279 |
| 1058309 | CTD or STD cast | 2004-04-07 22:45:00 | 26.52717 N, 76.80633 W | RRS Discovery D279 |
| 1261239 | Water sample data | 2004-04-07 23:38:00 | 26.52716 N, 76.80634 W | RRS Discovery D279 |
| 669285 | Currents -subsurface Eulerian | 2004-04-08 00:00:14 | 26.53633 N, 76.804 W | RRS Discovery D279 |
| 670108 | Currents -subsurface Eulerian | 2004-04-08 00:02:35 | 26.537 N, 76.804 W | RRS Discovery D279 |
| 1058310 | CTD or STD cast | 2004-04-08 02:38:00 | 26.51267 N, 76.78183 W | RRS Discovery D279 |
| 1261240 | Water sample data | 2004-04-08 03:46:30 | 26.51263 N, 76.78186 W | RRS Discovery D279 |
| 1058322 | CTD or STD cast | 2004-04-08 07:02:00 | 26.51533 N, 76.7455 W | RRS Discovery D279 |
| 1261252 | Water sample data | 2004-04-08 08:42:00 | 26.5154 N, 76.74548 W | RRS Discovery D279 |
| 1058334 | CTD or STD cast | 2004-04-08 12:49:00 | 26.5085 N, 76.68817 W | RRS Discovery D279 |
| 1261264 | Water sample data | 2004-04-08 14:52:30 | 26.50856 N, 76.68817 W | RRS Discovery D279 |
| 1058346 | CTD or STD cast | 2004-04-08 19:07:00 | 26.5075 N, 76.6375 W | RRS Discovery D279 |
| 1263640 | Water sample data | 2004-04-08 22:57:30 | 26.50756 N, 76.6375 W | RRS Discovery D279 |
| 669297 | Currents -subsurface Eulerian | 2004-04-09 00:00:18 | 26.49267 N, 76.61167 W | RRS Discovery D279 |
| 670121 | Currents -subsurface Eulerian | 2004-04-09 00:02:39 | 26.4925 N, 76.61133 W | RRS Discovery D279 |
| 1058358 | CTD or STD cast | 2004-04-09 06:33:00 | 26.49917 N, 76.528 W | RRS Discovery D279 |
| 1261276 | Water sample data | 2004-04-09 08:42:00 | 26.49914 N, 76.52803 W | RRS Discovery D279 |
| 1058371 | CTD or STD cast | 2004-04-09 13:30:00 | 26.5005 N, 76.429 W | RRS Discovery D279 |
| 1261288 | Water sample data | 2004-04-09 15:36:30 | 26.50056 N, 76.42902 W | RRS Discovery D279 |
| 1058383 | CTD or STD cast | 2004-04-09 19:44:00 | 26.49233 N, 76.302 W | RRS Discovery D279 |
| 1261307 | Water sample data | 2004-04-09 21:32:30 | 26.49241 N, 76.30192 W | RRS Discovery D279 |
| 669304 | Currents -subsurface Eulerian | 2004-04-10 00:00:17 | 26.48233 N, 76.299 W | RRS Discovery D279 |
| 670133 | Currents -subsurface Eulerian | 2004-04-10 00:01:23 | 26.4825 N, 76.298 W | RRS Discovery D279 |
| 1058395 | CTD or STD cast | 2004-04-10 01:18:00 | 26.487 N, 76.20983 W | RRS Discovery D279 |
| 1261319 | Water sample data | 2004-04-10 03:06:00 | 26.48706 N, 76.20988 W | RRS Discovery D279 |
| 1058402 | CTD or STD cast | 2004-04-10 07:32:00 | 26.49883 N, 76.09567 W | RRS Discovery D279 |
| 1261320 | Water sample data | 2004-04-10 09:05:00 | 26.49878 N, 76.0957 W | RRS Discovery D279 |
| 1058414 | CTD or STD cast | 2004-04-10 12:50:00 | 26.5025 N, 75.91033 W | RRS Discovery D279 |
| 1261332 | Water sample data | 2004-04-10 14:25:00 | 26.50244 N, 75.91032 W | RRS Discovery D279 |
| 1263652 | Water sample data | 2004-04-10 14:25:00 | 26.50244 N, 75.91032 W | RRS Discovery D279 |
| 1058426 | CTD or STD cast | 2004-04-10 17:56:00 | 26.49167 N, 75.70367 W | RRS Discovery D279 |
| 1261344 | Water sample data | 2004-04-10 19:28:00 | 26.49172 N, 75.70361 W | RRS Discovery D279 |
| 1263664 | Water sample data | 2004-04-10 19:28:00 | 26.49172 N, 75.70361 W | RRS Discovery D279 |
| 1058438 | CTD or STD cast | 2004-04-10 23:18:00 | 26.482 N, 75.5145 W | RRS Discovery D279 |
| 669316 | Currents -subsurface Eulerian | 2004-04-11 00:00:20 | 26.48567 N, 75.51267 W | RRS Discovery D279 |
| 670145 | Currents -subsurface Eulerian | 2004-04-11 00:01:30 | 26.4855 N, 75.51267 W | RRS Discovery D279 |
| 1261356 | Water sample data | 2004-04-11 00:53:00 | 26.48208 N, 75.51453 W | RRS Discovery D279 |
| 1058451 | CTD or STD cast | 2004-04-11 04:40:00 | 26.4915 N, 75.3075 W | RRS Discovery D279 |
| 1261368 | Water sample data | 2004-04-11 06:09:00 | 26.49153 N, 75.30758 W | RRS Discovery D279 |
| 1058463 | CTD or STD cast | 2004-04-11 10:01:00 | 26.51533 N, 75.0745 W | RRS Discovery D279 |
| 1261381 | Water sample data | 2004-04-11 11:42:30 | 26.51535 N, 75.07456 W | RRS Discovery D279 |
| 1263676 | Water sample data | 2004-04-11 11:42:30 | 26.51535 N, 75.07456 W | RRS Discovery D279 |
| 1058475 | CTD or STD cast | 2004-04-11 15:36:00 | 26.5105 N, 74.7975 W | RRS Discovery D279 |
| 1058487 | CTD or STD cast | 2004-04-11 17:37:00 | 26.50933 N, 74.789 W | RRS Discovery D279 |
| 1261393 | Water sample data | 2004-04-11 19:07:00 | 26.50938 N, 74.789 W | RRS Discovery D279 |
| 1058499 | CTD or STD cast | 2004-04-11 23:35:00 | 26.52 N, 74.49667 W | RRS Discovery D279 |
| 669328 | Currents -subsurface Eulerian | 2004-04-12 00:00:23 | 26.51167 N, 74.50683 W | RRS Discovery D279 |
| 670157 | Currents -subsurface Eulerian | 2004-04-12 00:01:35 | 26.51183 N, 74.5065 W | RRS Discovery D279 |
| 1261400 | Water sample data | 2004-04-12 01:13:00 | 26.52004 N, 74.49662 W | RRS Discovery D279 |
| 1058506 | CTD or STD cast | 2004-04-12 04:44:00 | 26.5095 N, 74.2365 W | RRS Discovery D279 |
| 1261412 | Water sample data | 2004-04-12 06:25:30 | 26.50953 N, 74.23645 W | RRS Discovery D279 |
| 1058518 | CTD or STD cast | 2004-04-12 09:53:00 | 26.50117 N, 73.93 W | RRS Discovery D279 |
| 1261424 | Water sample data | 2004-04-12 11:42:00 | 26.50118 N, 73.93001 W | RRS Discovery D279 |
| 1263688 | Water sample data | 2004-04-12 11:42:00 | 26.50118 N, 73.93001 W | RRS Discovery D279 |
| 1058531 | CTD or STD cast | 2004-04-12 15:34:00 | 26.51033 N, 73.56367 W | RRS Discovery D279 |
| 1261436 | Water sample data | 2004-04-12 17:24:30 | 26.5104 N, 73.56369 W | RRS Discovery D279 |
| 1058543 | CTD or STD cast | 2004-04-12 21:16:00 | 26.4995 N, 73.19567 W | RRS Discovery D279 |
| 1261448 | Water sample data | 2004-04-12 23:04:00 | 26.49947 N, 73.19566 W | RRS Discovery D279 |
| 669341 | Currents -subsurface Eulerian | 2004-04-13 00:00:23 | 26.49967 N, 73.1775 W | RRS Discovery D279 |
| 670169 | Currents -subsurface Eulerian | 2004-04-13 00:01:38 | 26.49967 N, 73.177 W | RRS Discovery D279 |
| 1058555 | CTD or STD cast | 2004-04-13 03:17:00 | 26.50217 N, 72.847 W | RRS Discovery D279 |
| 1261461 | Water sample data | 2004-04-13 05:08:00 | 26.50223 N, 72.84708 W | RRS Discovery D279 |
| 1058567 | CTD or STD cast | 2004-04-13 10:09:00 | 26.49967 N, 72.486 W | RRS Discovery D279 |
| 1261473 | Water sample data | 2004-04-13 12:03:00 | 26.49968 N, 72.48593 W | RRS Discovery D279 |
| 1263707 | Water sample data | 2004-04-13 12:03:00 | 26.49968 N, 72.48593 W | RRS Discovery D279 |
| 1058579 | CTD or STD cast | 2004-04-13 16:59:00 | 26.48817 N, 72.0065 W | RRS Discovery D279 |
| 1261485 | Water sample data | 2004-04-13 18:48:30 | 26.48818 N, 72.00642 W | RRS Discovery D279 |
| 1058580 | CTD or STD cast | 2004-04-13 22:59:00 | 26.483 N, 71.75167 W | RRS Discovery D279 |
| 669353 | Currents -subsurface Eulerian | 2004-04-14 00:00:26 | 26.48417 N, 71.74883 W | RRS Discovery D279 |
| 670170 | Currents -subsurface Eulerian | 2004-04-14 00:01:42 | 26.484 N, 71.74883 W | RRS Discovery D279 |
| 1261497 | Water sample data | 2004-04-14 00:51:00 | 26.48295 N, 71.75166 W | RRS Discovery D279 |
| 1058592 | CTD or STD cast | 2004-04-14 05:43:00 | 26.50817 N, 71.34333 W | RRS Discovery D279 |
| 1058611 | CTD or STD cast | 2004-04-14 11:50:00 | 26.49 N, 70.98683 W | RRS Discovery D279 |
| 1261504 | Water sample data | 2004-04-14 13:45:00 | 26.48999 N, 70.98682 W | RRS Discovery D279 |
| 1263719 | Water sample data | 2004-04-14 13:45:00 | 26.48999 N, 70.98682 W | RRS Discovery D279 |
| 1058623 | CTD or STD cast | 2004-04-14 18:37:00 | 26.13383 N, 70.60133 W | RRS Discovery D279 |
| 1261516 | Water sample data | 2004-04-14 20:27:00 | 26.1338 N, 70.60127 W | RRS Discovery D279 |
| 669365 | Currents -subsurface Eulerian | 2004-04-15 00:00:29 | 25.89667 N, 70.37383 W | RRS Discovery D279 |
| 670182 | Currents -subsurface Eulerian | 2004-04-15 00:01:46 | 25.89333 N, 70.371 W | RRS Discovery D279 |
| 1058635 | CTD or STD cast | 2004-04-15 01:16:00 | 25.76517 N, 70.23817 W | RRS Discovery D279 |
| 1261528 | Water sample data | 2004-04-15 03:02:00 | 25.7652 N, 70.23813 W | RRS Discovery D279 |
| 1058647 | CTD or STD cast | 2004-04-15 08:00:00 | 25.38033 N, 69.87733 W | RRS Discovery D279 |
| 1261541 | Water sample data | 2004-04-15 10:01:30 | 25.38039 N, 69.87737 W | RRS Discovery D279 |
| 1058659 | CTD or STD cast | 2004-04-15 15:03:00 | 25.00083 N, 69.50617 W | RRS Discovery D279 |
| 1261553 | Water sample data | 2004-04-15 17:03:00 | 25.00084 N, 69.50616 W | RRS Discovery D279 |
| 1263720 | Water sample data | 2004-04-15 17:03:00 | 25.00084 N, 69.50616 W | RRS Discovery D279 |
| 1058660 | CTD or STD cast | 2004-04-15 22:49:00 | 24.49417 N, 69.14683 W | RRS Discovery D279 |
| 669377 | Currents -subsurface Eulerian | 2004-04-16 00:00:30 | 24.49467 N, 69.144 W | RRS Discovery D279 |
| 670194 | Currents -subsurface Eulerian | 2004-04-16 00:01:50 | 24.49467 N, 69.14417 W | RRS Discovery D279 |
| 1261565 | Water sample data | 2004-04-16 00:38:30 | 24.49411 N, 69.14676 W | RRS Discovery D279 |
| 1058672 | CTD or STD cast | 2004-04-16 06:51:00 | 24.50883 N, 68.4135 W | RRS Discovery D279 |
| 1261577 | Water sample data | 2004-04-16 08:48:00 | 24.50879 N, 68.41349 W | RRS Discovery D279 |
| 1058684 | CTD or STD cast | 2004-04-16 14:59:00 | 24.51067 N, 67.67067 W | RRS Discovery D279 |
| 1261589 | Water sample data | 2004-04-16 16:45:30 | 24.51074 N, 67.67065 W | RRS Discovery D279 |
| 1058696 | CTD or STD cast | 2004-04-16 22:38:00 | 24.48733 N, 66.92317 W | RRS Discovery D279 |
| 669389 | Currents -subsurface Eulerian | 2004-04-17 00:00:33 | 24.48767 N, 66.924 W | RRS Discovery D279 |
| 670201 | Currents -subsurface Eulerian | 2004-04-17 00:01:56 | 24.48767 N, 66.92383 W | RRS Discovery D279 |
| 1261590 | Water sample data | 2004-04-17 00:27:00 | 24.4873 N, 66.92314 W | RRS Discovery D279 |
| 1058703 | CTD or STD cast | 2004-04-17 06:16:00 | 24.50283 N, 66.19233 W | RRS Discovery D279 |
| 1261608 | Water sample data | 2004-04-17 08:01:30 | 24.5029 N, 66.19226 W | RRS Discovery D279 |
| 1058715 | CTD or STD cast | 2004-04-17 13:46:00 | 24.49567 N, 65.4635 W | RRS Discovery D279 |
| 1261621 | Water sample data | 2004-04-17 15:33:30 | 24.49573 N, 65.46346 W | RRS Discovery D279 |
| 1263732 | Water sample data | 2004-04-17 15:33:30 | 24.49573 N, 65.46346 W | RRS Discovery D279 |
| 1058727 | CTD or STD cast | 2004-04-17 21:36:00 | 24.50917 N, 64.65933 W | RRS Discovery D279 |
| 1261633 | Water sample data | 2004-04-17 23:29:00 | 24.50919 N, 64.65941 W | RRS Discovery D279 |
| 669390 | Currents -subsurface Eulerian | 2004-04-18 00:00:37 | 24.51317 N, 64.6635 W | RRS Discovery D279 |
| 670213 | Currents -subsurface Eulerian | 2004-04-18 00:02:00 | 24.51317 N, 64.66367 W | RRS Discovery D279 |
| 1058739 | CTD or STD cast | 2004-04-18 05:20:00 | 24.49783 N, 64.00117 W | RRS Discovery D279 |
| 1261645 | Water sample data | 2004-04-18 07:09:00 | 24.49787 N, 64.00118 W | RRS Discovery D279 |
| 1058740 | CTD or STD cast | 2004-04-18 13:33:00 | 24.505 N, 63.268 W | RRS Discovery D279 |
| 1261657 | Water sample data | 2004-04-18 15:19:30 | 24.50496 N, 63.26804 W | RRS Discovery D279 |
| 1058752 | CTD or STD cast | 2004-04-18 21:28:00 | 24.504 N, 62.528 W | RRS Discovery D279 |
| 1261669 | Water sample data | 2004-04-18 23:19:30 | 24.50405 N, 62.52804 W | RRS Discovery D279 |
| 669408 | Currents -subsurface Eulerian | 2004-04-19 00:00:37 | 24.502 N, 62.53 W | RRS Discovery D279 |
| 670225 | Currents -subsurface Eulerian | 2004-04-19 00:02:05 | 24.502 N, 62.53 W | RRS Discovery D279 |
| 1058764 | CTD or STD cast | 2004-04-19 05:19:00 | 24.5075 N, 61.7985 W | RRS Discovery D279 |
| 1261670 | Water sample data | 2004-04-19 07:12:00 | 24.50751 N, 61.79844 W | RRS Discovery D279 |
| 1058776 | CTD or STD cast | 2004-04-19 13:06:00 | 24.50117 N, 61.063 W | RRS Discovery D279 |
| 1261682 | Water sample data | 2004-04-19 15:02:30 | 24.5012 N, 61.06298 W | RRS Discovery D279 |
| 1263744 | Water sample data | 2004-04-19 15:02:30 | 24.5012 N, 61.06298 W | RRS Discovery D279 |
| 1058788 | CTD or STD cast | 2004-04-19 21:00:00 | 24.512 N, 60.32317 W | RRS Discovery D279 |
| 1261694 | Water sample data | 2004-04-19 22:59:30 | 24.51196 N, 60.32312 W | RRS Discovery D279 |
| 669421 | Currents -subsurface Eulerian | 2004-04-20 00:00:40 | 24.522 N, 60.31867 W | RRS Discovery D279 |
| 670237 | Currents -subsurface Eulerian | 2004-04-20 00:02:09 | 24.52217 N, 60.3185 W | RRS Discovery D279 |
| 1058807 | CTD or STD cast | 2004-04-20 05:10:00 | 24.51533 N, 59.59183 W | RRS Discovery D279 |
| 1261701 | Water sample data | 2004-04-20 07:11:00 | 24.51532 N, 59.59186 W | RRS Discovery D279 |
| 1058819 | CTD or STD cast | 2004-04-20 13:18:00 | 24.49817 N, 58.85783 W | RRS Discovery D279 |
| 1261713 | Water sample data | 2004-04-20 15:19:30 | 24.49814 N, 58.85783 W | RRS Discovery D279 |
| 1058820 | CTD or STD cast | 2004-04-20 20:51:00 | 24.4995 N, 58.1325 W | RRS Discovery D279 |
| 1261725 | Water sample data | 2004-04-20 22:44:30 | 24.49944 N, 58.13257 W | RRS Discovery D279 |
| 669433 | Currents -subsurface Eulerian | 2004-04-21 00:00:40 | 24.497 N, 58.13167 W | RRS Discovery D279 |
| 670249 | Currents -subsurface Eulerian | 2004-04-21 00:02:15 | 24.49683 N, 58.13167 W | RRS Discovery D279 |
| 1058832 | CTD or STD cast | 2004-04-21 04:40:00 | 24.50217 N, 57.38867 W | RRS Discovery D279 |
| 1261737 | Water sample data | 2004-04-21 06:33:30 | 24.50212 N, 57.38867 W | RRS Discovery D279 |
| 1058844 | CTD or STD cast | 2004-04-21 12:35:00 | 24.49517 N, 56.66717 W | RRS Discovery D279 |
| 1261749 | Water sample data | 2004-04-21 14:28:00 | 24.49509 N, 56.66721 W | RRS Discovery D279 |
| 1263756 | Water sample data | 2004-04-21 14:28:00 | 24.49509 N, 56.66721 W | RRS Discovery D279 |
| 1058856 | CTD or STD cast | 2004-04-21 20:18:00 | 24.51683 N, 55.93533 W | RRS Discovery D279 |
| 1261750 | Water sample data | 2004-04-21 22:15:00 | 24.51691 N, 55.93536 W | RRS Discovery D279 |
| 669445 | Currents -subsurface Eulerian | 2004-04-22 00:00:44 | 24.53217 N, 55.943 W | RRS Discovery D279 |
| 670250 | Currents -subsurface Eulerian | 2004-04-22 00:02:19 | 24.5325 N, 55.94317 W | RRS Discovery D279 |
| 1058868 | CTD or STD cast | 2004-04-22 04:24:00 | 24.5045 N, 55.2125 W | RRS Discovery D279 |
| 1261762 | Water sample data | 2004-04-22 06:12:00 | 24.50449 N, 55.21244 W | RRS Discovery D279 |
| 1058881 | CTD or STD cast | 2004-04-22 12:13:00 | 24.49967 N, 54.47367 W | RRS Discovery D279 |
| 1261774 | Water sample data | 2004-04-22 13:59:30 | 24.49975 N, 54.47366 W | RRS Discovery D279 |
| 1263768 | Water sample data | 2004-04-22 13:59:30 | 24.49975 N, 54.47366 W | RRS Discovery D279 |
| 1058893 | CTD or STD cast | 2004-04-22 19:54:00 | 24.49433 N, 53.73617 W | RRS Discovery D279 |
| 1261786 | Water sample data | 2004-04-22 21:44:30 | 24.49426 N, 53.73616 W | RRS Discovery D279 |
| 669457 | Currents -subsurface Eulerian | 2004-04-23 00:00:45 | 24.49033 N, 53.71083 W | RRS Discovery D279 |
| 670262 | Currents -subsurface Eulerian | 2004-04-23 00:02:21 | 24.49083 N, 53.70517 W | RRS Discovery D279 |
| 1058900 | CTD or STD cast | 2004-04-23 02:54:00 | 24.49767 N, 53.17817 W | RRS Discovery D279 |
| 1261798 | Water sample data | 2004-04-23 04:51:30 | 24.49765 N, 53.17809 W | RRS Discovery D279 |
| 1058912 | CTD or STD cast | 2004-04-23 09:52:00 | 24.5045 N, 52.63733 W | RRS Discovery D279 |
| 1261805 | Water sample data | 2004-04-23 11:34:30 | 24.50445 N, 52.63738 W | RRS Discovery D279 |
| 1058924 | CTD or STD cast | 2004-04-23 16:06:00 | 24.49933 N, 52.1615 W | RRS Discovery D279 |
| 1261817 | Water sample data | 2004-04-23 17:41:30 | 24.49938 N, 52.16146 W | RRS Discovery D279 |
| 1263781 | Water sample data | 2004-04-23 17:41:30 | 24.49938 N, 52.16146 W | RRS Discovery D279 |
| 1058936 | CTD or STD cast | 2004-04-23 23:07:00 | 24.49967 N, 51.538 W | RRS Discovery D279 |
| 669469 | Currents -subsurface Eulerian | 2004-04-24 00:00:47 | 24.49883 N, 51.53633 W | RRS Discovery D279 |
| 670274 | Currents -subsurface Eulerian | 2004-04-24 00:02:26 | 24.499 N, 51.53633 W | RRS Discovery D279 |
| 1261829 | Water sample data | 2004-04-24 00:51:30 | 24.49971 N, 51.53798 W | RRS Discovery D279 |
| 1058948 | CTD or STD cast | 2004-04-24 05:59:00 | 24.50767 N, 50.997 W | RRS Discovery D279 |
| 1058961 | CTD or STD cast | 2004-04-24 13:03:00 | 24.4995 N, 50.44167 W | RRS Discovery D279 |
| 1261830 | Water sample data | 2004-04-24 14:37:30 | 24.49953 N, 50.44174 W | RRS Discovery D279 |
| 1263793 | Water sample data | 2004-04-24 14:37:30 | 24.49953 N, 50.44174 W | RRS Discovery D279 |
| 1058973 | CTD or STD cast | 2004-04-24 19:22:00 | 24.51017 N, 49.87517 W | RRS Discovery D279 |
| 1261842 | Water sample data | 2004-04-24 20:56:00 | 24.51019 N, 49.87516 W | RRS Discovery D279 |
| 669470 | Currents -subsurface Eulerian | 2004-04-25 00:00:47 | 24.50883 N, 49.63033 W | RRS Discovery D279 |
| 670286 | Currents -subsurface Eulerian | 2004-04-25 00:02:30 | 24.5085 N, 49.6245 W | RRS Discovery D279 |
| 1058985 | CTD or STD cast | 2004-04-25 01:47:00 | 24.50733 N, 49.334 W | RRS Discovery D279 |
| 1261854 | Water sample data | 2004-04-25 03:38:30 | 24.50729 N, 49.33404 W | RRS Discovery D279 |
| 1058997 | CTD or STD cast | 2004-04-25 08:42:00 | 24.49733 N, 48.77483 W | RRS Discovery D279 |
| 1261866 | Water sample data | 2004-04-25 10:15:30 | 24.49732 N, 48.7748 W | RRS Discovery D279 |
| 1059000 | CTD or STD cast | 2004-04-25 16:05:00 | 24.5055 N, 47.96267 W | RRS Discovery D279 |
| 1261878 | Water sample data | 2004-04-25 17:24:30 | 24.50545 N, 47.96263 W | RRS Discovery D279 |
| 1263800 | Water sample data | 2004-04-25 17:24:30 | 24.50545 N, 47.96263 W | RRS Discovery D279 |
| 1059012 | CTD or STD cast | 2004-04-25 23:23:00 | 24.49883 N, 47.12483 W | RRS Discovery D279 |
| 669482 | Currents -subsurface Eulerian | 2004-04-26 00:00:49 | 24.498 N, 47.12617 W | RRS Discovery D279 |
| 670298 | Currents -subsurface Eulerian | 2004-04-26 00:02:13 | 24.498 N, 47.12617 W | RRS Discovery D279 |
| 1261891 | Water sample data | 2004-04-26 00:40:00 | 24.49882 N, 47.1249 W | RRS Discovery D279 |
| 1059024 | CTD or STD cast | 2004-04-26 05:05:00 | 24.49583 N, 46.57467 W | RRS Discovery D279 |
| 1261909 | Water sample data | 2004-04-26 06:19:30 | 24.49575 N, 46.57467 W | RRS Discovery D279 |
| 1059036 | CTD or STD cast | 2004-04-26 10:29:00 | 24.4955 N, 46.0355 W | RRS Discovery D279 |
| 1261910 | Water sample data | 2004-04-26 11:31:30 | 24.49544 N, 46.03556 W | RRS Discovery D279 |
| 1059048 | CTD or STD cast | 2004-04-26 15:41:00 | 24.50483 N, 45.49033 W | RRS Discovery D279 |
| 1261922 | Water sample data | 2004-04-26 16:55:30 | 24.50475 N, 45.49031 W | RRS Discovery D279 |
| 1263812 | Water sample data | 2004-04-26 16:55:30 | 24.50475 N, 45.49031 W | RRS Discovery D279 |
| 1059061 | CTD or STD cast | 2004-04-26 21:27:00 | 24.48583 N, 44.94583 W | RRS Discovery D279 |
| 1261934 | Water sample data | 2004-04-26 22:40:30 | 24.48584 N, 44.94587 W | RRS Discovery D279 |
| 669494 | Currents -subsurface Eulerian | 2004-04-27 00:00:51 | 24.46567 N, 44.961 W | RRS Discovery D279 |
| 670305 | Currents -subsurface Eulerian | 2004-04-27 00:02:18 | 24.4655 N, 44.96133 W | RRS Discovery D279 |
| 1059073 | CTD or STD cast | 2004-04-27 03:29:00 | 24.502 N, 44.3955 W | RRS Discovery D279 |
| 1261946 | Water sample data | 2004-04-27 04:47:00 | 24.50196 N, 44.39555 W | RRS Discovery D279 |
| 1059085 | CTD or STD cast | 2004-04-27 09:26:00 | 24.50033 N, 43.84383 W | RRS Discovery D279 |
| 1261958 | Water sample data | 2004-04-27 10:43:30 | 24.50028 N, 43.84384 W | RRS Discovery D279 |
| 1059097 | CTD or STD cast | 2004-04-27 16:18:00 | 24.5095 N, 43.00717 W | RRS Discovery D279 |
| 1261971 | Water sample data | 2004-04-27 17:48:00 | 24.50957 N, 43.00718 W | RRS Discovery D279 |
| 1263824 | Water sample data | 2004-04-27 17:48:00 | 24.50957 N, 43.00718 W | RRS Discovery D279 |
| 1059104 | CTD or STD cast | 2004-04-27 23:41:00 | 24.499 N, 42.18417 W | RRS Discovery D279 |
| 669501 | Currents -subsurface Eulerian | 2004-04-28 00:00:54 | 24.49883 N, 42.17967 W | RRS Discovery D279 |
| 670317 | Currents -subsurface Eulerian | 2004-04-28 00:02:23 | 24.499 N, 42.17967 W | RRS Discovery D279 |
| 1261983 | Water sample data | 2004-04-28 01:14:00 | 24.49908 N, 42.18412 W | RRS Discovery D279 |
| 1059116 | CTD or STD cast | 2004-04-28 06:08:00 | 24.50867 N, 41.63983 W | RRS Discovery D279 |
| 1261995 | Water sample data | 2004-04-28 07:35:30 | 24.50871 N, 41.63991 W | RRS Discovery D279 |
| 1263836 | Water sample data | 2004-04-28 07:35:30 | 24.50871 N, 41.63991 W | RRS Discovery D279 |
| 1059128 | CTD or STD cast | 2004-04-28 12:30:00 | 24.50317 N, 41.09183 W | RRS Discovery D279 |
| 1262009 | Water sample data | 2004-04-28 14:05:00 | 24.50313 N, 41.0919 W | RRS Discovery D279 |
| 1059141 | CTD or STD cast | 2004-04-28 20:10:00 | 24.51183 N, 40.2815 W | RRS Discovery D279 |
| 1262010 | Water sample data | 2004-04-28 21:41:30 | 24.51178 N, 40.28147 W | RRS Discovery D279 |
| 669513 | Currents -subsurface Eulerian | 2004-04-29 00:00:56 | 24.50817 N, 40.17767 W | RRS Discovery D279 |
| 670329 | Currents -subsurface Eulerian | 2004-04-29 00:02:26 | 24.50783 N, 40.17283 W | RRS Discovery D279 |
| 1059153 | CTD or STD cast | 2004-04-29 05:12:00 | 24.49767 N, 39.245 W | RRS Discovery D279 |
| 1262022 | Water sample data | 2004-04-29 06:52:30 | 24.49775 N, 39.24506 W | RRS Discovery D279 |
| 1059165 | CTD or STD cast | 2004-04-29 12:35:00 | 24.499 N, 38.5235 W | RRS Discovery D279 |
| 1262034 | Water sample data | 2004-04-29 13:53:30 | 24.49894 N, 38.52354 W | RRS Discovery D279 |
| 1263848 | Water sample data | 2004-04-29 13:53:30 | 24.49894 N, 38.52354 W | RRS Discovery D279 |
| 1059177 | CTD or STD cast | 2004-04-29 19:58:00 | 24.499 N, 37.69517 W | RRS Discovery D279 |
| 1262046 | Water sample data | 2004-04-29 21:40:00 | 24.49908 N, 37.69516 W | RRS Discovery D279 |
| 669525 | Currents -subsurface Eulerian | 2004-04-30 00:00:57 | 24.49667 N, 37.63267 W | RRS Discovery D279 |
| 670330 | Currents -subsurface Eulerian | 2004-04-30 00:02:31 | 24.497 N, 37.62767 W | RRS Discovery D279 |
| 1059189 | CTD or STD cast | 2004-04-30 04:00:00 | 24.4895 N, 36.88 W | RRS Discovery D279 |
| 1262058 | Water sample data | 2004-04-30 05:32:30 | 24.48948 N, 36.87996 W | RRS Discovery D279 |
| 1059190 | CTD or STD cast | 2004-04-30 11:34:00 | 24.49267 N, 36.04583 W | RRS Discovery D279 |
| 1262071 | Water sample data | 2004-04-30 13:16:30 | 24.49267 N, 36.04583 W | RRS Discovery D279 |
| 1059208 | CTD or STD cast | 2004-04-30 19:27:00 | 24.5045 N, 35.22867 W | RRS Discovery D279 |
| 1262083 | Water sample data | 2004-04-30 21:01:00 | 24.50443 N, 35.22859 W | RRS Discovery D279 |
| 1263861 | Water sample data | 2004-04-30 21:01:00 | 24.50443 N, 35.22859 W | RRS Discovery D279 |
| 669537 | Currents -subsurface Eulerian | 2004-05-01 00:01:01 | 24.50583 N, 34.99483 W | RRS Discovery D279 |
| 670342 | Currents -subsurface Eulerian | 2004-05-01 00:02:37 | 24.5055 N, 34.98917 W | RRS Discovery D279 |
| 1059221 | CTD or STD cast | 2004-05-01 03:08:00 | 24.49567 N, 34.38933 W | RRS Discovery D279 |
| 1262095 | Water sample data | 2004-05-01 04:39:00 | 24.49572 N, 34.38929 W | RRS Discovery D279 |
| 1059233 | CTD or STD cast | 2004-05-01 10:19:00 | 24.49917 N, 33.57333 W | RRS Discovery D279 |
| 1262102 | Water sample data | 2004-05-01 12:02:30 | 24.49909 N, 33.57325 W | RRS Discovery D279 |
| 1263873 | Water sample data | 2004-05-01 12:02:30 | 24.49909 N, 33.57325 W | RRS Discovery D279 |
| 1059245 | CTD or STD cast | 2004-05-01 18:36:00 | 24.50967 N, 32.65717 W | RRS Discovery D279 |
| 1262114 | Water sample data | 2004-05-01 20:20:00 | 24.50971 N, 32.6571 W | RRS Discovery D279 |
| 670354 | Currents -subsurface Eulerian | 2004-05-02 00:02:39 | 24.50667 N, 32.3185 W | RRS Discovery D279 |
| 1059257 | CTD or STD cast | 2004-05-02 03:05:00 | 24.4995 N, 31.73083 W | RRS Discovery D279 |
| 1262126 | Water sample data | 2004-05-02 04:51:30 | 24.49957 N, 31.73084 W | RRS Discovery D279 |
| 1059269 | CTD or STD cast | 2004-05-02 11:21:00 | 24.49517 N, 30.81267 W | RRS Discovery D279 |
| 1262138 | Water sample data | 2004-05-02 12:57:30 | 24.49512 N, 30.8127 W | RRS Discovery D279 |
| 1059270 | CTD or STD cast | 2004-05-02 19:32:00 | 24.5015 N, 29.89 W | RRS Discovery D279 |
| 1262151 | Water sample data | 2004-05-02 21:17:30 | 24.50153 N, 29.89004 W | RRS Discovery D279 |
| 1263885 | Water sample data | 2004-05-02 21:17:30 | 24.50153 N, 29.89004 W | RRS Discovery D279 |
| 669550 | Currents -subsurface Eulerian | 2004-05-03 00:01:02 | 24.502 N, 29.71967 W | RRS Discovery D279 |
| 670366 | Currents -subsurface Eulerian | 2004-05-03 00:01:05 | 24.502 N, 29.7195 W | RRS Discovery D279 |
| 1059282 | CTD or STD cast | 2004-05-03 03:53:00 | 24.50283 N, 28.98767 W | RRS Discovery D279 |
| 1262163 | Water sample data | 2004-05-03 05:31:00 | 24.50279 N, 28.98761 W | RRS Discovery D279 |
| 1059294 | CTD or STD cast | 2004-05-03 12:04:00 | 24.50117 N, 28.06867 W | RRS Discovery D279 |
| 1262175 | Water sample data | 2004-05-03 13:40:30 | 24.50125 N, 28.06863 W | RRS Discovery D279 |
| 1263897 | Water sample data | 2004-05-03 13:40:30 | 24.50125 N, 28.06863 W | RRS Discovery D279 |
| 1059301 | CTD or STD cast | 2004-05-03 20:13:00 | 24.51183 N, 27.1485 W | RRS Discovery D279 |
| 1262187 | Water sample data | 2004-05-03 21:51:00 | 24.51183 N, 27.14855 W | RRS Discovery D279 |
| 669562 | Currents -subsurface Eulerian | 2004-05-04 00:01:08 | 24.52783 N, 27.0845 W | RRS Discovery D279 |
| 670378 | Currents -subsurface Eulerian | 2004-05-04 00:01:10 | 24.52783 N, 27.0845 W | RRS Discovery D279 |
| 1059313 | CTD or STD cast | 2004-05-04 04:27:00 | 24.499 N, 26.23133 W | RRS Discovery D279 |
| 1262199 | Water sample data | 2004-05-04 06:00:30 | 24.49902 N, 26.23132 W | RRS Discovery D279 |
| 1263904 | Water sample data | 2004-05-04 06:00:30 | 24.49902 N, 26.23132 W | RRS Discovery D279 |
| 1059325 | CTD or STD cast | 2004-05-04 12:13:00 | 24.50117 N, 25.31767 W | RRS Discovery D279 |
| 1262206 | Water sample data | 2004-05-04 13:41:00 | 24.50115 N, 25.31769 W | RRS Discovery D279 |
| 1059337 | CTD or STD cast | 2004-05-04 20:22:00 | 24.49533 N, 24.404 W | RRS Discovery D279 |
| 1262218 | Water sample data | 2004-05-04 21:53:00 | 24.49529 N, 24.40399 W | RRS Discovery D279 |
| 669574 | Currents -subsurface Eulerian | 2004-05-05 00:01:06 | 24.4945 N, 24.3445 W | RRS Discovery D279 |
| 670391 | Currents -subsurface Eulerian | 2004-05-05 00:01:14 | 24.49467 N, 24.34417 W | RRS Discovery D279 |
| 1059349 | CTD or STD cast | 2004-05-05 04:31:00 | 24.51333 N, 23.49467 W | RRS Discovery D279 |
| 1262231 | Water sample data | 2004-05-05 05:59:00 | 24.51341 N, 23.49472 W | RRS Discovery D279 |
| 1059350 | CTD or STD cast | 2004-05-05 11:36:00 | 24.73817 N, 22.82233 W | RRS Discovery D279 |
| 1262243 | Water sample data | 2004-05-05 13:00:30 | 24.73816 N, 22.82232 W | RRS Discovery D279 |
| 1263916 | Water sample data | 2004-05-05 13:00:30 | 24.73816 N, 22.82232 W | RRS Discovery D279 |
| 1059362 | CTD or STD cast | 2004-05-05 18:40:00 | 24.985 N, 22.1485 W | RRS Discovery D279 |
| 1262255 | Water sample data | 2004-05-05 20:05:30 | 24.98499 N, 22.14856 W | RRS Discovery D279 |
| 669586 | Currents -subsurface Eulerian | 2004-05-06 00:01:10 | 25.13767 N, 21.69683 W | RRS Discovery D279 |
| 670409 | Currents -subsurface Eulerian | 2004-05-06 00:01:18 | 25.13783 N, 21.69633 W | RRS Discovery D279 |
| 1059374 | CTD or STD cast | 2004-05-06 01:18:00 | 25.22167 N, 21.47767 W | RRS Discovery D279 |
| 1262267 | Water sample data | 2004-05-06 02:48:30 | 25.22166 N, 21.47765 W | RRS Discovery D279 |
| 1059386 | CTD or STD cast | 2004-05-06 08:20:00 | 25.45017 N, 20.8045 W | RRS Discovery D279 |
| 1262279 | Water sample data | 2004-05-06 09:49:00 | 25.4502 N, 20.80444 W | RRS Discovery D279 |
| 1059398 | CTD or STD cast | 2004-05-06 16:19:00 | 25.64983 N, 20.24267 W | RRS Discovery D279 |
| 1262280 | Water sample data | 2004-05-06 17:37:00 | 25.64986 N, 20.24262 W | RRS Discovery D279 |
| 1263928 | Water sample data | 2004-05-06 17:37:00 | 25.64986 N, 20.24262 W | RRS Discovery D279 |
| 669598 | Currents -subsurface Eulerian | 2004-05-07 00:01:11 | 25.93033 N, 19.48033 W | RRS Discovery D279 |
| 670410 | Currents -subsurface Eulerian | 2004-05-07 00:01:22 | 25.9305 N, 19.48033 W | RRS Discovery D279 |
| 1059405 | CTD or STD cast | 2004-05-07 07:40:00 | 25.92033 N, 19.48617 W | RRS Discovery D279 |
| 1262292 | Water sample data | 2004-05-07 08:55:30 | 25.9204 N, 19.48611 W | RRS Discovery D279 |
| 1059417 | CTD or STD cast | 2004-05-07 13:35:00 | 26.13367 N, 18.90983 W | RRS Discovery D279 |
| 1262311 | Water sample data | 2004-05-07 14:36:00 | 26.13359 N, 18.90979 W | RRS Discovery D279 |
| 1263941 | Water sample data | 2004-05-07 14:36:00 | 26.13359 N, 18.90979 W | RRS Discovery D279 |
| 1059429 | CTD or STD cast | 2004-05-07 20:00:00 | 26.3855 N, 18.16067 W | RRS Discovery D279 |
| 1262323 | Water sample data | 2004-05-07 21:09:00 | 26.38548 N, 18.16072 W | RRS Discovery D279 |
| 669605 | Currents -subsurface Eulerian | 2004-05-08 00:01:14 | 26.47383 N, 17.85767 W | RRS Discovery D279 |
| 670422 | Currents -subsurface Eulerian | 2004-05-08 00:01:27 | 26.474 N, 17.85683 W | RRS Discovery D279 |
| 1059430 | CTD or STD cast | 2004-05-08 02:09:00 | 26.5965 N, 17.469 W | RRS Discovery D279 |
| 1262335 | Water sample data | 2004-05-08 03:19:30 | 26.59654 N, 17.46892 W | RRS Discovery D279 |
| 1059442 | CTD or STD cast | 2004-05-08 08:25:00 | 26.8145 N, 16.7845 W | RRS Discovery D279 |
| 1262347 | Water sample data | 2004-05-08 09:35:00 | 26.81446 N, 16.78454 W | RRS Discovery D279 |
| 1059454 | CTD or STD cast | 2004-05-08 15:31:00 | 27.04317 N, 16.122 W | RRS Discovery D279 |
| 1262359 | Water sample data | 2004-05-08 16:36:30 | 27.04313 N, 16.12192 W | RRS Discovery D279 |
| 1263953 | Water sample data | 2004-05-08 16:36:30 | 27.04313 N, 16.12192 W | RRS Discovery D279 |
| 1059466 | CTD or STD cast | 2004-05-08 20:50:00 | 27.2335 N, 15.59217 W | RRS Discovery D279 |
| 1262360 | Water sample data | 2004-05-08 21:49:30 | 27.23351 N, 15.59212 W | RRS Discovery D279 |
| 669617 | Currents -subsurface Eulerian | 2004-05-09 00:01:17 | 27.283 N, 15.4135 W | RRS Discovery D279 |
| 670434 | Currents -subsurface Eulerian | 2004-05-09 00:01:31 | 27.28317 N, 15.41283 W | RRS Discovery D279 |
| 1059478 | CTD or STD cast | 2004-05-09 03:15:00 | 27.43333 N, 14.86033 W | RRS Discovery D279 |
| 1262372 | Water sample data | 2004-05-09 04:03:30 | 27.43333 N, 14.86033 W | RRS Discovery D279 |
| 1059491 | CTD or STD cast | 2004-05-09 08:34:00 | 27.62067 N, 14.22867 W | RRS Discovery D279 |
| 1262384 | Water sample data | 2004-05-09 09:15:30 | 27.62067 N, 14.2287 W | RRS Discovery D279 |
| 1059509 | CTD or STD cast | 2004-05-09 12:38:00 | 27.82917 N, 13.8175 W | RRS Discovery D279 |
| 1262396 | Water sample data | 2004-05-09 13:06:30 | 27.82909 N, 13.81754 W | RRS Discovery D279 |
| 1058149 | CTD or STD cast | 2004-05-09 15:21:00 | 27.8525 N, 13.551 W | RRS Discovery D279 |
| 1262403 | Water sample data | 2004-05-09 15:48:00 | 27.85246 N, 13.55102 W | RRS Discovery D279 |
| 1058150 | CTD or STD cast | 2004-05-09 17:16:00 | 27.88 N, 13.42 W | RRS Discovery D279 |
| 1262415 | Water sample data | 2004-05-09 17:33:30 | 27.88 N, 13.41992 W | RRS Discovery D279 |
| 1058162 | CTD or STD cast | 2004-05-09 18:38:00 | 27.91583 N, 13.37383 W | RRS Discovery D279 |
| 1262427 | Water sample data | 2004-05-09 18:50:00 | 27.91582 N, 13.37385 W | RRS Discovery D279 |
| 1193136 | Currents -subsurface Eulerian | 2010-01-06 07:37:25 | 26.6371 N, 79.0754 W | RRS Discovery D346 |
| 1028897 | Currents -subsurface Eulerian | 2010-01-06 07:39:35 | 26.6414 N, 79.0798 W | RRS Discovery D346 |
| 1016859 | CTD or STD cast | 2010-01-06 16:49:44 | 27.835 N, 78.8402 W | RRS Discovery D346 |
| 1016860 | CTD or STD cast | 2010-01-07 04:19:57 | 27.3382 N, 79.9475 W | RRS Discovery D346 |
| 1342255 | Water sample data | 2010-01-07 04:31:30 | 27.33804 N, 79.9478 W | RRS Discovery D346 |
| 1344298 | Water sample data | 2010-01-07 04:31:30 | 27.33804 N, 79.9478 W | RRS Discovery D346 |
| 1016872 | CTD or STD cast | 2010-01-07 05:54:33 | 27.3456 N, 79.8516 W | RRS Discovery D346 |
| 1342267 | Water sample data | 2010-01-07 06:10:30 | 27.34605 N, 79.85183 W | RRS Discovery D346 |
| 1344305 | Water sample data | 2010-01-07 06:10:30 | 27.34605 N, 79.85183 W | RRS Discovery D346 |
| 1016884 | CTD or STD cast | 2010-01-07 07:51:44 | 27.3518 N, 79.7548 W | RRS Discovery D346 |
| 1342279 | Water sample data | 2010-01-07 08:15:30 | 27.35158 N, 79.75398 W | RRS Discovery D346 |
| 1344317 | Water sample data | 2010-01-07 08:15:30 | 27.35158 N, 79.75398 W | RRS Discovery D346 |
| 1016896 | CTD or STD cast | 2010-01-07 10:04:16 | 27.3402 N, 79.6742 W | RRS Discovery D346 |
| 1342280 | Water sample data | 2010-01-07 10:33:00 | 27.34112 N, 79.67438 W | RRS Discovery D346 |
| 1344329 | Water sample data | 2010-01-07 10:33:00 | 27.34112 N, 79.67438 W | RRS Discovery D346 |
| 1016903 | CTD or STD cast | 2010-01-07 12:41:28 | 27.344 N, 79.5779 W | RRS Discovery D346 |
| 1342292 | Water sample data | 2010-01-07 13:18:00 | 27.34423 N, 79.57801 W | RRS Discovery D346 |
| 1344330 | Water sample data | 2010-01-07 13:18:00 | 27.34423 N, 79.57801 W | RRS Discovery D346 |
| 1016915 | CTD or STD cast | 2010-01-07 15:33:24 | 27.3443 N, 79.5024 W | RRS Discovery D346 |
| 1342311 | Water sample data | 2010-01-07 15:59:30 | 27.34771 N, 79.50364 W | RRS Discovery D346 |
| 1344342 | Water sample data | 2010-01-07 15:59:30 | 27.34771 N, 79.50364 W | RRS Discovery D346 |
| 1016927 | CTD or STD cast | 2010-01-07 17:53:11 | 27.3472 N, 79.4168 W | RRS Discovery D346 |
| 1342323 | Water sample data | 2010-01-07 18:27:30 | 27.35106 N, 79.41633 W | RRS Discovery D346 |
| 1344354 | Water sample data | 2010-01-07 18:27:30 | 27.35106 N, 79.41633 W | RRS Discovery D346 |
| 1016939 | CTD or STD cast | 2010-01-07 20:23:31 | 27.3335 N, 79.3357 W | RRS Discovery D346 |
| 1342335 | Water sample data | 2010-01-07 20:48:30 | 27.33586 N, 79.33549 W | RRS Discovery D346 |
| 1344366 | Water sample data | 2010-01-07 20:48:30 | 27.33586 N, 79.33549 W | RRS Discovery D346 |
| 1016940 | CTD or STD cast | 2010-01-07 22:31:48 | 27.3323 N, 79.2504 W | RRS Discovery D346 |
| 1342347 | Water sample data | 2010-01-07 22:49:00 | 27.3329 N, 79.25042 W | RRS Discovery D346 |
| 1016952 | CTD or STD cast | 2010-01-08 00:16:51 | 27.3352 N, 79.2083 W | RRS Discovery D346 |
| 1342359 | Water sample data | 2010-01-08 00:34:30 | 27.3349 N, 79.20777 W | RRS Discovery D346 |
| 1344378 | Water sample data | 2010-01-08 00:34:30 | 27.3349 N, 79.20777 W | RRS Discovery D346 |
| 1016964 | CTD or STD cast | 2010-01-08 02:04:45 | 27.3382 N, 79.1836 W | RRS Discovery D346 |
| 1342360 | Water sample data | 2010-01-08 02:16:30 | 27.3387 N, 79.18341 W | RRS Discovery D346 |
| 1344391 | Water sample data | 2010-01-08 02:16:30 | 27.3387 N, 79.18341 W | RRS Discovery D346 |
| 1016976 | CTD or STD cast | 2010-01-08 04:01:57 | 27.3347 N, 79.1742 W | RRS Discovery D346 |
| 1344409 | Water sample data | 2010-01-08 04:09:30 | 27.33507 N, 79.17418 W | RRS Discovery D346 |
| 1016988 | CTD or STD cast | 2010-01-08 18:54:09 | 26.5012 N, 76.9342 W | RRS Discovery D346 |
| 1342372 | Water sample data | 2010-01-08 19:09:30 | 26.50108 N, 76.93452 W | RRS Discovery D346 |
| 1344410 | Water sample data | 2010-01-08 19:09:30 | 26.50108 N, 76.93452 W | RRS Discovery D346 |
| 1017003 | CTD or STD cast | 2010-01-08 20:35:52 | 26.4989 N, 76.8648 W | RRS Discovery D346 |
| 1342384 | Water sample data | 2010-01-08 21:21:30 | 26.4984 N, 76.86464 W | RRS Discovery D346 |
| 1344422 | Water sample data | 2010-01-08 21:21:30 | 26.4984 N, 76.86464 W | RRS Discovery D346 |
| 1017015 | CTD or STD cast | 2010-01-08 23:27:40 | 26.5328 N, 76.8162 W | RRS Discovery D346 |
| 1344434 | Water sample data | 2010-01-09 00:28:30 | 26.53293 N, 76.81668 W | RRS Discovery D346 |
| 1017027 | CTD or STD cast | 2010-01-09 03:13:18 | 26.5032 N, 76.7821 W | RRS Discovery D346 |
| 1342396 | Water sample data | 2010-01-09 04:19:00 | 26.50393 N, 76.78135 W | RRS Discovery D346 |
| 1344446 | Water sample data | 2010-01-09 04:19:00 | 26.50393 N, 76.78135 W | RRS Discovery D346 |
| 1017039 | CTD or STD cast | 2010-01-09 06:55:58 | 26.4988 N, 76.8008 W | RRS Discovery D346 |
| 1344458 | Water sample data | 2010-01-09 07:51:30 | 26.49865 N, 76.80089 W | RRS Discovery D346 |
| 1017040 | CTD or STD cast | 2010-01-09 10:02:51 | 26.4957 N, 76.7613 W | RRS Discovery D346 |
| 1342403 | Water sample data | 2010-01-09 12:03:30 | 26.49469 N, 76.76098 W | RRS Discovery D346 |
| 1344471 | Water sample data | 2010-01-09 12:03:30 | 26.49469 N, 76.76098 W | RRS Discovery D346 |
| 1017052 | CTD or STD cast | 2010-01-09 16:12:40 | 26.4992 N, 76.6826 W | RRS Discovery D346 |
| 1342415 | Water sample data | 2010-01-09 18:20:00 | 26.49875 N, 76.68424 W | RRS Discovery D346 |
| 1344483 | Water sample data | 2010-01-09 18:20:00 | 26.49875 N, 76.68424 W | RRS Discovery D346 |
| 1017064 | CTD or STD cast | 2010-01-09 23:15:14 | 26.4971 N, 76.6298 W | RRS Discovery D346 |
| 1342427 | Water sample data | 2010-01-10 01:14:30 | 26.49684 N, 76.62938 W | RRS Discovery D346 |
| 1344495 | Water sample data | 2010-01-10 01:14:30 | 26.49684 N, 76.62938 W | RRS Discovery D346 |
| 1017076 | CTD or STD cast | 2010-01-10 05:21:19 | 26.4961 N, 76.5379 W | RRS Discovery D346 |
| 1342439 | Water sample data | 2010-01-10 07:12:00 | 26.49494 N, 76.53818 W | RRS Discovery D346 |
| 1344502 | Water sample data | 2010-01-10 07:12:00 | 26.49494 N, 76.53818 W | RRS Discovery D346 |
| 1017088 | CTD or STD cast | 2010-01-10 13:48:19 | 26.4837 N, 76.4433 W | RRS Discovery D346 |
| 1342440 | Water sample data | 2010-01-10 15:48:00 | 26.48189 N, 76.44609 W | RRS Discovery D346 |
| 1344514 | Water sample data | 2010-01-10 15:48:00 | 26.48189 N, 76.44609 W | RRS Discovery D346 |
| 1017107 | CTD or STD cast | 2010-01-10 19:47:24 | 26.4959 N, 76.3029 W | RRS Discovery D346 |
| 1342452 | Water sample data | 2010-01-10 21:51:30 | 26.49375 N, 76.30589 W | RRS Discovery D346 |
| 1344526 | Water sample data | 2010-01-10 21:51:30 | 26.49375 N, 76.30589 W | RRS Discovery D346 |
| 1017119 | CTD or STD cast | 2010-01-11 01:49:13 | 26.4871 N, 76.2249 W | RRS Discovery D346 |
| 1342464 | Water sample data | 2010-01-11 03:50:00 | 26.48586 N, 76.22706 W | RRS Discovery D346 |
| 1344538 | Water sample data | 2010-01-11 03:50:00 | 26.48586 N, 76.22706 W | RRS Discovery D346 |
| 1017120 | CTD or STD cast | 2010-01-11 13:50:38 | 26.4958 N, 76.1087 W | RRS Discovery D346 |
| 1342476 | Water sample data | 2010-01-11 15:47:30 | 26.49558 N, 76.10989 W | RRS Discovery D346 |
| 1344551 | Water sample data | 2010-01-11 15:47:30 | 26.49558 N, 76.10989 W | RRS Discovery D346 |
| 1017132 | CTD or STD cast | 2010-01-11 19:54:21 | 26.5018 N, 75.9088 W | RRS Discovery D346 |
| 1342488 | Water sample data | 2010-01-11 21:55:00 | 26.5022 N, 75.91209 W | RRS Discovery D346 |
| 1344563 | Water sample data | 2010-01-11 21:55:00 | 26.5022 N, 75.91209 W | RRS Discovery D346 |
| 1017144 | CTD or STD cast | 2010-01-12 02:11:17 | 26.4985 N, 75.726 W | RRS Discovery D346 |
| 1342507 | Water sample data | 2010-01-12 04:02:00 | 26.49871 N, 75.72734 W | RRS Discovery D346 |
| 1344575 | Water sample data | 2010-01-12 04:02:00 | 26.49871 N, 75.72734 W | RRS Discovery D346 |
| 1017156 | CTD or STD cast | 2010-01-12 07:56:03 | 26.5005 N, 75.5089 W | RRS Discovery D346 |
| 1342519 | Water sample data | 2010-01-12 09:46:00 | 26.49974 N, 75.51019 W | RRS Discovery D346 |
| 1344587 | Water sample data | 2010-01-12 09:46:00 | 26.49974 N, 75.51019 W | RRS Discovery D346 |
| 1017168 | CTD or STD cast | 2010-01-12 13:26:37 | 26.4969 N, 75.312 W | RRS Discovery D346 |
| 1342520 | Water sample data | 2010-01-12 15:19:30 | 26.49867 N, 75.31252 W | RRS Discovery D346 |
| 1344599 | Water sample data | 2010-01-12 15:19:30 | 26.49867 N, 75.31252 W | RRS Discovery D346 |
| 1017181 | CTD or STD cast | 2010-01-12 19:12:23 | 26.5032 N, 75.0731 W | RRS Discovery D346 |
| 1342532 | Water sample data | 2010-01-12 21:02:00 | 26.50328 N, 75.07471 W | RRS Discovery D346 |
| 1344606 | Water sample data | 2010-01-12 21:02:00 | 26.50328 N, 75.07471 W | RRS Discovery D346 |
| 1017193 | CTD or STD cast | 2010-01-13 00:51:19 | 26.4966 N, 74.8041 W | RRS Discovery D346 |
| 1342544 | Water sample data | 2010-01-13 02:44:00 | 26.4942 N, 74.80497 W | RRS Discovery D346 |
| 1344618 | Water sample data | 2010-01-13 02:44:00 | 26.4942 N, 74.80497 W | RRS Discovery D346 |
| 1017200 | CTD or STD cast | 2010-01-13 06:37:22 | 26.498 N, 74.5169 W | RRS Discovery D346 |
| 1342556 | Water sample data | 2010-01-13 08:23:30 | 26.49863 N, 74.51781 W | RRS Discovery D346 |
| 1344631 | Water sample data | 2010-01-13 08:23:30 | 26.49863 N, 74.51781 W | RRS Discovery D346 |
| 1017212 | CTD or STD cast | 2010-01-13 12:17:23 | 26.498 N, 74.2419 W | RRS Discovery D346 |
| 1342568 | Water sample data | 2010-01-13 14:01:30 | 26.49713 N, 74.24363 W | RRS Discovery D346 |
| 1344643 | Water sample data | 2010-01-13 14:01:30 | 26.49713 N, 74.24363 W | RRS Discovery D346 |
| 1017224 | CTD or STD cast | 2010-01-13 18:01:56 | 26.5031 N, 73.9388 W | RRS Discovery D346 |
| 1342581 | Water sample data | 2010-01-13 19:54:30 | 26.5028 N, 73.94002 W | RRS Discovery D346 |
| 1344655 | Water sample data | 2010-01-13 19:54:30 | 26.5028 N, 73.94002 W | RRS Discovery D346 |
| 1017236 | CTD or STD cast | 2010-01-14 00:23:58 | 26.5164 N, 73.5857 W | RRS Discovery D346 |
| 1342593 | Water sample data | 2010-01-14 02:18:30 | 26.51838 N, 73.58549 W | RRS Discovery D346 |
| 1344667 | Water sample data | 2010-01-14 02:18:30 | 26.51838 N, 73.58549 W | RRS Discovery D346 |
| 1017248 | CTD or STD cast | 2010-01-14 07:00:21 | 26.5102 N, 73.2055 W | RRS Discovery D346 |
| 1342600 | Water sample data | 2010-01-14 08:53:00 | 26.51268 N, 73.20587 W | RRS Discovery D346 |
| 1344679 | Water sample data | 2010-01-14 08:53:00 | 26.51268 N, 73.20587 W | RRS Discovery D346 |
| 1017261 | CTD or STD cast | 2010-01-14 13:20:01 | 26.5059 N, 72.8415 W | RRS Discovery D346 |
| 1342612 | Water sample data | 2010-01-14 15:19:00 | 26.50665 N, 72.84284 W | RRS Discovery D346 |
| 1017273 | CTD or STD cast | 2010-01-14 20:04:06 | 26.5077 N, 72.4638 W | RRS Discovery D346 |
| 1342624 | Water sample data | 2010-01-14 22:06:30 | 26.51143 N, 72.46429 W | RRS Discovery D346 |
| 1344680 | Water sample data | 2010-01-14 22:06:30 | 26.51143 N, 72.46429 W | RRS Discovery D346 |
| 1017285 | CTD or STD cast | 2010-01-15 02:45:17 | 26.5136 N, 72.1067 W | RRS Discovery D346 |
| 1342636 | Water sample data | 2010-01-15 04:48:30 | 26.51372 N, 72.10567 W | RRS Discovery D346 |
| 1344692 | Water sample data | 2010-01-15 04:48:30 | 26.51372 N, 72.10567 W | RRS Discovery D346 |
| 1017297 | CTD or STD cast | 2010-01-15 09:36:12 | 26.5137 N, 71.7189 W | RRS Discovery D346 |
| 1342648 | Water sample data | 2010-01-15 11:55:30 | 26.51671 N, 71.71356 W | RRS Discovery D346 |
| 1344711 | Water sample data | 2010-01-15 11:55:30 | 26.51671 N, 71.71356 W | RRS Discovery D346 |
| 1017304 | CTD or STD cast | 2010-01-15 16:39:02 | 26.4959 N, 71.3615 W | RRS Discovery D346 |
| 1342661 | Water sample data | 2010-01-15 18:41:00 | 26.49692 N, 71.36012 W | RRS Discovery D346 |
| 1344723 | Water sample data | 2010-01-15 18:41:00 | 26.49692 N, 71.36012 W | RRS Discovery D346 |
| 1017316 | CTD or STD cast | 2010-01-15 23:14:46 | 26.4757 N, 71.0042 W | RRS Discovery D346 |
| 1342673 | Water sample data | 2010-01-16 01:28:30 | 26.47532 N, 71.0031 W | RRS Discovery D346 |
| 1344735 | Water sample data | 2010-01-16 01:28:30 | 26.47532 N, 71.0031 W | RRS Discovery D346 |
| 1017328 | CTD or STD cast | 2010-01-16 07:15:08 | 26.1026 N, 70.6338 W | RRS Discovery D346 |
| 1342685 | Water sample data | 2010-01-16 09:28:00 | 26.10572 N, 70.63513 W | RRS Discovery D346 |
| 1344747 | Water sample data | 2010-01-16 09:28:00 | 26.10572 N, 70.63513 W | RRS Discovery D346 |
| 1017341 | CTD or STD cast | 2010-01-16 15:26:34 | 25.699 N, 70.2657 W | RRS Discovery D346 |
| 1342697 | Water sample data | 2010-01-16 17:30:00 | 25.69979 N, 70.26573 W | RRS Discovery D346 |
| 1344759 | Water sample data | 2010-01-16 17:30:00 | 25.69979 N, 70.26573 W | RRS Discovery D346 |
| 1017353 | CTD or STD cast | 2010-01-16 23:16:01 | 25.3052 N, 69.9027 W | RRS Discovery D346 |
| 1342704 | Water sample data | 2010-01-17 01:09:00 | 25.30513 N, 69.90303 W | RRS Discovery D346 |
| 1344760 | Water sample data | 2010-01-17 01:09:00 | 25.30513 N, 69.90303 W | RRS Discovery D346 |
| 1017365 | CTD or STD cast | 2010-01-17 06:58:12 | 24.9046 N, 69.5358 W | RRS Discovery D346 |
| 1342716 | Water sample data | 2010-01-17 08:53:30 | 24.90678 N, 69.53661 W | RRS Discovery D346 |
| 1344772 | Water sample data | 2010-01-17 08:53:30 | 24.90678 N, 69.53661 W | RRS Discovery D346 |
| 1017377 | CTD or STD cast | 2010-01-17 14:35:13 | 24.505 N, 69.1528 W | RRS Discovery D346 |
| 1342728 | Water sample data | 2010-01-17 16:27:30 | 24.5057 N, 69.15375 W | RRS Discovery D346 |
| 1344784 | Water sample data | 2010-01-17 16:27:30 | 24.5057 N, 69.15375 W | RRS Discovery D346 |
| 1017389 | CTD or STD cast | 2010-01-17 23:07:47 | 24.5094 N, 68.4072 W | RRS Discovery D346 |
| 1342741 | Water sample data | 2010-01-18 01:05:30 | 24.50824 N, 68.40497 W | RRS Discovery D346 |
| 1344796 | Water sample data | 2010-01-18 01:05:30 | 24.50824 N, 68.40497 W | RRS Discovery D346 |
| 1017390 | CTD or STD cast | 2010-01-18 08:04:51 | 24.5084 N, 67.67 W | RRS Discovery D346 |
| 1342753 | Water sample data | 2010-01-18 09:59:00 | 24.5104 N, 67.66965 W | RRS Discovery D346 |
| 1344803 | Water sample data | 2010-01-18 09:59:00 | 24.5104 N, 67.66965 W | RRS Discovery D346 |
| 1017408 | CTD or STD cast | 2010-01-18 16:05:22 | 24.4999 N, 66.9392 W | RRS Discovery D346 |
| 1342765 | Water sample data | 2010-01-18 18:03:00 | 24.49903 N, 66.9409 W | RRS Discovery D346 |
| 1344815 | Water sample data | 2010-01-18 18:03:00 | 24.49903 N, 66.9409 W | RRS Discovery D346 |
| 1017421 | CTD or STD cast | 2010-01-19 00:15:47 | 24.4991 N, 66.2105 W | RRS Discovery D346 |
| 1342777 | Water sample data | 2010-01-19 01:58:30 | 24.49835 N, 66.20922 W | RRS Discovery D346 |
| 1344827 | Water sample data | 2010-01-19 01:58:30 | 24.49835 N, 66.20922 W | RRS Discovery D346 |
| 1017433 | CTD or STD cast | 2010-01-19 07:57:03 | 24.5016 N, 65.4893 W | RRS Discovery D346 |
| 1342789 | Water sample data | 2010-01-19 10:00:30 | 24.5019 N, 65.49149 W | RRS Discovery D346 |
| 1344839 | Water sample data | 2010-01-19 10:00:30 | 24.5019 N, 65.49149 W | RRS Discovery D346 |
| 1017445 | CTD or STD cast | 2010-01-19 16:43:48 | 24.4989 N, 64.7677 W | RRS Discovery D346 |
| 1342790 | Water sample data | 2010-01-19 18:52:30 | 24.49843 N, 64.76879 W | RRS Discovery D346 |
| 1344840 | Water sample data | 2010-01-19 18:52:30 | 24.49843 N, 64.76879 W | RRS Discovery D346 |
| 1017457 | CTD or STD cast | 2010-01-20 01:50:12 | 24.5136 N, 64.0161 W | RRS Discovery D346 |
| 1342808 | Water sample data | 2010-01-20 03:41:30 | 24.51382 N, 64.01524 W | RRS Discovery D346 |
| 1344852 | Water sample data | 2010-01-20 03:41:30 | 24.51382 N, 64.01524 W | RRS Discovery D346 |
| 1017469 | CTD or STD cast | 2010-01-20 10:06:29 | 24.4954 N, 63.2919 W | RRS Discovery D346 |
| 1342821 | Water sample data | 2010-01-20 11:53:30 | 24.49555 N, 63.29101 W | RRS Discovery D346 |
| 1344864 | Water sample data | 2010-01-20 11:53:30 | 24.49555 N, 63.29101 W | RRS Discovery D346 |
| 1017470 | CTD or STD cast | 2010-01-20 18:06:51 | 24.5011 N, 62.5559 W | RRS Discovery D346 |
| 1342833 | Water sample data | 2010-01-20 20:08:00 | 24.49957 N, 62.5552 W | RRS Discovery D346 |
| 1344876 | Water sample data | 2010-01-20 20:08:00 | 24.49957 N, 62.5552 W | RRS Discovery D346 |
| 1017482 | CTD or STD cast | 2010-01-21 02:46:15 | 24.5084 N, 61.8063 W | RRS Discovery D346 |
| 1342845 | Water sample data | 2010-01-21 04:34:30 | 24.50759 N, 61.80467 W | RRS Discovery D346 |
| 1344888 | Water sample data | 2010-01-21 04:34:30 | 24.50759 N, 61.80467 W | RRS Discovery D346 |
| 1017494 | CTD or STD cast | 2010-01-21 10:24:47 | 24.5016 N, 61.0844 W | RRS Discovery D346 |
| 1342857 | Water sample data | 2010-01-21 12:15:30 | 24.50159 N, 61.08662 W | RRS Discovery D346 |
| 1344907 | Water sample data | 2010-01-21 12:15:30 | 24.50159 N, 61.08662 W | RRS Discovery D346 |
| 1017501 | CTD or STD cast | 2010-01-21 18:17:55 | 24.4995 N, 60.3471 W | RRS Discovery D346 |
| 1342869 | Water sample data | 2010-01-21 20:22:00 | 24.49924 N, 60.34854 W | RRS Discovery D346 |
| 1344919 | Water sample data | 2010-01-21 20:22:00 | 24.49924 N, 60.34854 W | RRS Discovery D346 |
| 1017513 | CTD or STD cast | 2010-01-22 02:45:20 | 24.5062 N, 59.6282 W | RRS Discovery D346 |
| 1342870 | Water sample data | 2010-01-22 04:40:00 | 24.50682 N, 59.62942 W | RRS Discovery D346 |
| 1344920 | Water sample data | 2010-01-22 04:40:00 | 24.50682 N, 59.62942 W | RRS Discovery D346 |
| 1017525 | CTD or STD cast | 2010-01-22 11:17:42 | 24.498 N, 58.8964 W | RRS Discovery D346 |
| 1342882 | Water sample data | 2010-01-22 13:13:00 | 24.49885 N, 58.89326 W | RRS Discovery D346 |
| 1344932 | Water sample data | 2010-01-22 13:13:00 | 24.49885 N, 58.89326 W | RRS Discovery D346 |
| 1017537 | CTD or STD cast | 2010-01-22 19:59:35 | 24.5018 N, 58.1505 W | RRS Discovery D346 |
| 1342894 | Water sample data | 2010-01-22 21:50:00 | 24.50281 N, 58.15082 W | RRS Discovery D346 |
| 1344944 | Water sample data | 2010-01-22 21:50:00 | 24.50281 N, 58.15082 W | RRS Discovery D346 |
| 1017549 | CTD or STD cast | 2010-01-23 04:34:49 | 24.502 N, 57.3985 W | RRS Discovery D346 |
| 1342901 | Water sample data | 2010-01-23 06:47:00 | 24.50162 N, 57.39886 W | RRS Discovery D346 |
| 1344956 | Water sample data | 2010-01-23 06:47:00 | 24.50162 N, 57.39886 W | RRS Discovery D346 |
| 1018332 | CTD or STD cast | 2010-01-23 11:20:12 | 24.4967 N, 57.0506 W | RRS Discovery D346 |
| 1017550 | CTD or STD cast | 2010-01-23 19:57:17 | 24.4891 N, 56.6897 W | RRS Discovery D346 |
| 1342913 | Water sample data | 2010-01-23 22:10:00 | 24.48782 N, 56.69055 W | RRS Discovery D346 |
| 1344968 | Water sample data | 2010-01-23 22:10:00 | 24.48782 N, 56.69055 W | RRS Discovery D346 |
| 1017562 | CTD or STD cast | 2010-01-24 05:36:09 | 24.4799 N, 55.9437 W | RRS Discovery D346 |
| 1344981 | Water sample data | 2010-01-24 08:13:00 | 24.47713 N, 55.94313 W | RRS Discovery D346 |
| 1017574 | CTD or STD cast | 2010-01-24 18:34:57 | 24.4963 N, 55.2389 W | RRS Discovery D346 |
| 1342925 | Water sample data | 2010-01-24 20:50:30 | 24.4984 N, 55.24135 W | RRS Discovery D346 |
| 1344993 | Water sample data | 2010-01-24 20:50:30 | 24.4984 N, 55.24135 W | RRS Discovery D346 |
| 1017586 | CTD or STD cast | 2010-01-25 05:52:38 | 24.5097 N, 54.4528 W | RRS Discovery D346 |
| 1342937 | Water sample data | 2010-01-25 08:19:30 | 24.50906 N, 54.45181 W | RRS Discovery D346 |
| 1345007 | Water sample data | 2010-01-25 08:19:30 | 24.50906 N, 54.45181 W | RRS Discovery D346 |
| 1017598 | CTD or STD cast | 2010-01-25 15:08:50 | 24.51 N, 53.938 W | RRS Discovery D346 |
| 1342949 | Water sample data | 2010-01-25 17:33:30 | 24.50845 N, 53.93895 W | RRS Discovery D346 |
| 1345019 | Water sample data | 2010-01-25 17:33:30 | 24.50845 N, 53.93895 W | RRS Discovery D346 |
| 1017605 | CTD or STD cast | 2010-01-26 00:46:48 | 24.8391 N, 53.3993 W | RRS Discovery D346 |
| 1345020 | Water sample data | 2010-01-26 03:04:30 | 24.84099 N, 53.39958 W | RRS Discovery D346 |
| 1017617 | CTD or STD cast | 2010-01-26 09:38:18 | 25.1108 N, 52.8405 W | RRS Discovery D346 |
| 1342950 | Water sample data | 2010-01-26 11:52:00 | 25.11123 N, 52.8402 W | RRS Discovery D346 |
| 1345032 | Water sample data | 2010-01-26 11:52:00 | 25.11123 N, 52.8402 W | RRS Discovery D346 |
| 1017629 | CTD or STD cast | 2010-01-26 17:30:40 | 25.0799 N, 52.2902 W | RRS Discovery D346 |
| 1342962 | Water sample data | 2010-01-26 19:34:00 | 25.077 N, 52.28995 W | RRS Discovery D346 |
| 1345044 | Water sample data | 2010-01-26 19:34:00 | 25.077 N, 52.28995 W | RRS Discovery D346 |
| 1017630 | CTD or STD cast | 2010-01-27 12:19:10 | 25.0222 N, 51.7532 W | RRS Discovery D346 |
| 1342974 | Water sample data | 2010-01-27 14:39:00 | 25.0239 N, 51.75391 W | RRS Discovery D346 |
| 1345056 | Water sample data | 2010-01-27 14:39:00 | 25.0239 N, 51.75391 W | RRS Discovery D346 |
| 1017642 | CTD or STD cast | 2010-01-27 20:32:41 | 24.9374 N, 51.1852 W | RRS Discovery D346 |
| 1342986 | Water sample data | 2010-01-27 22:27:00 | 24.93713 N, 51.18432 W | RRS Discovery D346 |
| 1345068 | Water sample data | 2010-01-27 22:27:00 | 24.93713 N, 51.18432 W | RRS Discovery D346 |
| 1017654 | CTD or STD cast | 2010-01-28 03:37:17 | 24.7984 N, 50.632 W | RRS Discovery D346 |
| 1342998 | Water sample data | 2010-01-28 05:27:30 | 24.79935 N, 50.63183 W | RRS Discovery D346 |
| 1345081 | Water sample data | 2010-01-28 05:27:30 | 24.79935 N, 50.63183 W | RRS Discovery D346 |
| 1017666 | CTD or STD cast | 2010-01-28 10:38:11 | 24.6687 N, 50.0899 W | RRS Discovery D346 |
| 1343001 | Water sample data | 2010-01-28 12:44:00 | 24.66852 N, 50.09264 W | RRS Discovery D346 |
| 1345093 | Water sample data | 2010-01-28 12:44:00 | 24.66852 N, 50.09264 W | RRS Discovery D346 |
| 1017678 | CTD or STD cast | 2010-01-28 18:16:18 | 24.5207 N, 49.5342 W | RRS Discovery D346 |
| 1343013 | Water sample data | 2010-01-28 20:38:00 | 24.52057 N, 49.53572 W | RRS Discovery D346 |
| 1345100 | Water sample data | 2010-01-28 20:38:00 | 24.52057 N, 49.53572 W | RRS Discovery D346 |
| 1017691 | CTD or STD cast | 2010-01-29 02:26:43 | 24.349 N, 49.0082 W | RRS Discovery D346 |
| 1343025 | Water sample data | 2010-01-29 04:19:00 | 24.34836 N, 49.00696 W | RRS Discovery D346 |
| 1345112 | Water sample data | 2010-01-29 04:19:00 | 24.34836 N, 49.00696 W | RRS Discovery D346 |
| 1017709 | CTD or STD cast | 2010-01-29 09:37:27 | 24.196 N, 48.473 W | RRS Discovery D346 |
| 1343037 | Water sample data | 2010-01-29 11:24:30 | 24.1963 N, 48.47379 W | RRS Discovery D346 |
| 1345124 | Water sample data | 2010-01-29 11:24:30 | 24.1963 N, 48.47379 W | RRS Discovery D346 |
| 1017710 | CTD or STD cast | 2010-01-29 16:30:53 | 24.0662 N, 47.9426 W | RRS Discovery D346 |
| 1343049 | Water sample data | 2010-01-29 18:31:00 | 24.06649 N, 47.93983 W | RRS Discovery D346 |
| 1345136 | Water sample data | 2010-01-29 18:31:00 | 24.06649 N, 47.93983 W | RRS Discovery D346 |
| 1017722 | CTD or STD cast | 2010-01-29 23:57:39 | 23.9755 N, 47.4087 W | RRS Discovery D346 |
| 1345148 | Water sample data | 2010-01-30 01:50:00 | 23.97365 N, 47.41016 W | RRS Discovery D346 |
| 1017734 | CTD or STD cast | 2010-01-30 07:40:03 | 23.8992 N, 46.8761 W | RRS Discovery D346 |
| 1343050 | Water sample data | 2010-01-30 09:39:00 | 23.89929 N, 46.87672 W | RRS Discovery D346 |
| 1345161 | Water sample data | 2010-01-30 09:39:00 | 23.89929 N, 46.87672 W | RRS Discovery D346 |
| 1017746 | CTD or STD cast | 2010-01-30 15:19:41 | 23.8739 N, 46.3337 W | RRS Discovery D346 |
| 1343062 | Water sample data | 2010-01-30 17:13:30 | 23.87108 N, 46.33421 W | RRS Discovery D346 |
| 1345173 | Water sample data | 2010-01-30 17:13:30 | 23.87108 N, 46.33421 W | RRS Discovery D346 |
| 1017758 | CTD or STD cast | 2010-01-30 22:51:04 | 23.7669 N, 45.802 W | RRS Discovery D346 |
| 1343074 | Water sample data | 2010-01-31 00:29:30 | 23.76724 N, 45.80241 W | RRS Discovery D346 |
| 1345185 | Water sample data | 2010-01-31 00:29:30 | 23.76724 N, 45.80241 W | RRS Discovery D346 |
| 1017771 | CTD or STD cast | 2010-01-31 05:28:04 | 23.7325 N, 45.27 W | RRS Discovery D346 |
| 1343086 | Water sample data | 2010-01-31 07:03:30 | 23.73259 N, 45.2714 W | RRS Discovery D346 |
| 1345197 | Water sample data | 2010-01-31 07:03:30 | 23.73259 N, 45.2714 W | RRS Discovery D346 |
| 1017783 | CTD or STD cast | 2010-01-31 12:32:54 | 23.6355 N, 44.7354 W | RRS Discovery D346 |
| 1343098 | Water sample data | 2010-01-31 14:08:30 | 23.63517 N, 44.73504 W | RRS Discovery D346 |
| 1345204 | Water sample data | 2010-01-31 14:08:30 | 23.63517 N, 44.73504 W | RRS Discovery D346 |
| 1017795 | CTD or STD cast | 2010-01-31 19:19:54 | 23.5353 N, 44.2091 W | RRS Discovery D346 |
| 1343105 | Water sample data | 2010-01-31 21:02:30 | 23.53593 N, 44.20944 W | RRS Discovery D346 |
| 1345216 | Water sample data | 2010-01-31 21:02:30 | 23.53593 N, 44.20944 W | RRS Discovery D346 |
| 1017802 | CTD or STD cast | 2010-02-01 02:18:59 | 23.45 N, 43.6718 W | RRS Discovery D346 |
| 1343117 | Water sample data | 2010-02-01 04:06:00 | 23.44956 N, 43.67065 W | RRS Discovery D346 |
| 1345228 | Water sample data | 2010-02-01 04:06:00 | 23.44956 N, 43.67065 W | RRS Discovery D346 |
| 1017814 | CTD or STD cast | 2010-02-01 09:21:46 | 23.3727 N, 43.1415 W | RRS Discovery D346 |
| 1343129 | Water sample data | 2010-02-01 11:08:00 | 23.37276 N, 43.14126 W | RRS Discovery D346 |
| 1345241 | Water sample data | 2010-02-01 11:08:00 | 23.37276 N, 43.14126 W | RRS Discovery D346 |
| 1017826 | CTD or STD cast | 2010-02-01 16:18:44 | 23.2503 N, 42.6004 W | RRS Discovery D346 |
| 1343130 | Water sample data | 2010-02-01 18:24:30 | 23.2506 N, 42.60084 W | RRS Discovery D346 |
| 1345253 | Water sample data | 2010-02-01 18:24:30 | 23.2506 N, 42.60084 W | RRS Discovery D346 |
| 1017838 | CTD or STD cast | 2010-02-02 01:44:52 | 23.3847 N, 41.7691 W | RRS Discovery D346 |
| 1343142 | Water sample data | 2010-02-02 03:24:00 | 23.38595 N, 41.76971 W | RRS Discovery D346 |
| 1345265 | Water sample data | 2010-02-02 03:24:00 | 23.38595 N, 41.76971 W | RRS Discovery D346 |
| 1017851 | CTD or STD cast | 2010-02-02 10:05:18 | 23.5204 N, 40.9444 W | RRS Discovery D346 |
| 1343154 | Water sample data | 2010-02-02 11:43:30 | 23.52099 N, 40.94439 W | RRS Discovery D346 |
| 1345277 | Water sample data | 2010-02-02 11:43:30 | 23.52099 N, 40.94439 W | RRS Discovery D346 |
| 1017863 | CTD or STD cast | 2010-02-02 18:31:04 | 23.6671 N, 40.1083 W | RRS Discovery D346 |
| 1343166 | Water sample data | 2010-02-02 20:24:30 | 23.66841 N, 40.10839 W | RRS Discovery D346 |
| 1345289 | Water sample data | 2010-02-02 20:24:30 | 23.66841 N, 40.10839 W | RRS Discovery D346 |
| 1017875 | CTD or STD cast | 2010-02-03 03:18:35 | 23.7994 N, 39.2622 W | RRS Discovery D346 |
| 1343178 | Water sample data | 2010-02-03 05:08:30 | 23.79951 N, 39.26253 W | RRS Discovery D346 |
| 1345290 | Water sample data | 2010-02-03 05:08:30 | 23.79951 N, 39.26253 W | RRS Discovery D346 |
| 1017887 | CTD or STD cast | 2010-02-03 11:54:31 | 23.9348 N, 38.4332 W | RRS Discovery D346 |
| 1343191 | Water sample data | 2010-02-03 13:55:30 | 23.93409 N, 38.43501 W | RRS Discovery D346 |
| 1345308 | Water sample data | 2010-02-03 13:55:30 | 23.93409 N, 38.43501 W | RRS Discovery D346 |
| 1017899 | CTD or STD cast | 2010-02-03 20:50:04 | 24.0895 N, 37.6111 W | RRS Discovery D346 |
| 1343209 | Water sample data | 2010-02-03 22:40:00 | 24.08959 N, 37.61037 W | RRS Discovery D346 |
| 1345321 | Water sample data | 2010-02-03 22:40:00 | 24.08959 N, 37.61037 W | RRS Discovery D346 |
| 1017906 | CTD or STD cast | 2010-02-04 05:31:56 | 24.2193 N, 36.7698 W | RRS Discovery D346 |
| 1343210 | Water sample data | 2010-02-04 07:21:00 | 24.21911 N, 36.76954 W | RRS Discovery D346 |
| 1345333 | Water sample data | 2010-02-04 07:21:00 | 24.21911 N, 36.76954 W | RRS Discovery D346 |
| 1017918 | CTD or STD cast | 2010-02-04 13:54:12 | 24.3634 N, 35.9273 W | RRS Discovery D346 |
| 1343222 | Water sample data | 2010-02-04 15:54:30 | 24.36459 N, 35.9276 W | RRS Discovery D346 |
| 1345345 | Water sample data | 2010-02-04 15:54:30 | 24.36459 N, 35.9276 W | RRS Discovery D346 |
| 1017931 | CTD or STD cast | 2010-02-05 00:52:15 | 24.5062 N, 35.085 W | RRS Discovery D346 |
| 1343234 | Water sample data | 2010-02-05 02:50:00 | 24.50544 N, 35.08704 W | RRS Discovery D346 |
| 1345357 | Water sample data | 2010-02-05 02:50:00 | 24.50544 N, 35.08704 W | RRS Discovery D346 |
| 1017943 | CTD or STD cast | 2010-02-05 08:39:54 | 24.4954 N, 34.4167 W | RRS Discovery D346 |
| 1343246 | Water sample data | 2010-02-05 10:58:30 | 24.49656 N, 34.41498 W | RRS Discovery D346 |
| 1345369 | Water sample data | 2010-02-05 10:58:30 | 24.49656 N, 34.41498 W | RRS Discovery D346 |
| 1018344 | CTD or STD cast | 2010-02-05 15:34:09 | 24.5061 N, 34.0463 W | RRS Discovery D346 |
| 1017955 | CTD or STD cast | 2010-02-05 19:28:58 | 24.4961 N, 33.7285 W | RRS Discovery D346 |
| 1343258 | Water sample data | 2010-02-05 21:19:30 | 24.49568 N, 33.72751 W | RRS Discovery D346 |
| 1345370 | Water sample data | 2010-02-05 21:19:30 | 24.49568 N, 33.72751 W | RRS Discovery D346 |
| 1017967 | CTD or STD cast | 2010-02-06 02:51:21 | 24.5002 N, 33.0449 W | RRS Discovery D346 |
| 1343271 | Water sample data | 2010-02-06 04:47:30 | 24.50075 N, 33.04511 W | RRS Discovery D346 |
| 1345382 | Water sample data | 2010-02-06 04:47:30 | 24.50075 N, 33.04511 W | RRS Discovery D346 |
| 1017979 | CTD or STD cast | 2010-02-06 10:35:08 | 24.494 N, 32.3574 W | RRS Discovery D346 |
| 1343283 | Water sample data | 2010-02-06 12:30:00 | 24.49286 N, 32.35696 W | RRS Discovery D346 |
| 1345394 | Water sample data | 2010-02-06 12:30:00 | 24.49286 N, 32.35696 W | RRS Discovery D346 |
| 1017980 | CTD or STD cast | 2010-02-06 18:07:00 | 24.4976 N, 31.6808 W | RRS Discovery D346 |
| 1343295 | Water sample data | 2010-02-06 20:14:00 | 24.49735 N, 31.68006 W | RRS Discovery D346 |
| 1345401 | Water sample data | 2010-02-06 20:14:00 | 24.49735 N, 31.68006 W | RRS Discovery D346 |
| 1017992 | CTD or STD cast | 2010-02-07 02:21:34 | 24.4964 N, 31.0027 W | RRS Discovery D346 |
| 1343302 | Water sample data | 2010-02-07 04:25:30 | 24.49611 N, 31.00389 W | RRS Discovery D346 |
| 1345413 | Water sample data | 2010-02-07 04:25:30 | 24.49611 N, 31.00389 W | RRS Discovery D346 |
| 1018006 | CTD or STD cast | 2010-02-07 10:39:03 | 24.4919 N, 30.3215 W | RRS Discovery D346 |
| 1343314 | Water sample data | 2010-02-07 12:55:30 | 24.49241 N, 30.32428 W | RRS Discovery D346 |
| 1345425 | Water sample data | 2010-02-07 12:55:30 | 24.49241 N, 30.32428 W | RRS Discovery D346 |
| 1018018 | CTD or STD cast | 2010-02-07 19:30:12 | 24.5028 N, 29.6583 W | RRS Discovery D346 |
| 1343326 | Water sample data | 2010-02-07 21:40:00 | 24.50286 N, 29.65925 W | RRS Discovery D346 |
| 1345437 | Water sample data | 2010-02-07 21:40:00 | 24.50286 N, 29.65925 W | RRS Discovery D346 |
| 1018031 | CTD or STD cast | 2010-02-08 04:13:40 | 24.5009 N, 28.9609 W | RRS Discovery D346 |
| 1343338 | Water sample data | 2010-02-08 06:30:00 | 24.50148 N, 28.96346 W | RRS Discovery D346 |
| 1345449 | Water sample data | 2010-02-08 06:30:00 | 24.50148 N, 28.96346 W | RRS Discovery D346 |
| 1018043 | CTD or STD cast | 2010-02-08 13:03:44 | 24.5009 N, 28.2953 W | RRS Discovery D346 |
| 1343351 | Water sample data | 2010-02-08 15:26:30 | 24.50023 N, 28.29389 W | RRS Discovery D346 |
| 1345450 | Water sample data | 2010-02-08 15:26:30 | 24.50023 N, 28.29389 W | RRS Discovery D346 |
| 1018055 | CTD or STD cast | 2010-02-08 22:15:58 | 24.4916 N, 27.5993 W | RRS Discovery D346 |
| 1343363 | Water sample data | 2010-02-09 00:22:00 | 24.4927 N, 27.60176 W | RRS Discovery D346 |
| 1345462 | Water sample data | 2010-02-09 00:22:00 | 24.4927 N, 27.60176 W | RRS Discovery D346 |
| 1018067 | CTD or STD cast | 2010-02-09 06:37:24 | 24.512 N, 26.9118 W | RRS Discovery D346 |
| 1343375 | Water sample data | 2010-02-09 08:43:00 | 24.51282 N, 26.9139 W | RRS Discovery D346 |
| 1345474 | Water sample data | 2010-02-09 08:43:00 | 24.51282 N, 26.9139 W | RRS Discovery D346 |
| 1018079 | CTD or STD cast | 2010-02-09 15:02:52 | 24.5099 N, 26.225 W | RRS Discovery D346 |
| 1343387 | Water sample data | 2010-02-09 17:03:00 | 24.51089 N, 26.23072 W | RRS Discovery D346 |
| 1345486 | Water sample data | 2010-02-09 17:03:00 | 24.51089 N, 26.23072 W | RRS Discovery D346 |
| 1018080 | CTD or STD cast | 2010-02-09 23:28:37 | 24.5112 N, 25.5416 W | RRS Discovery D346 |
| 1343399 | Water sample data | 2010-02-10 01:35:30 | 24.51277 N, 25.54231 W | RRS Discovery D346 |
| 1345498 | Water sample data | 2010-02-10 01:35:30 | 24.51277 N, 25.54231 W | RRS Discovery D346 |
| 1018092 | CTD or STD cast | 2010-02-10 08:11:21 | 24.5142 N, 24.8471 W | RRS Discovery D346 |
| 1343406 | Water sample data | 2010-02-10 10:03:00 | 24.51549 N, 24.84693 W | RRS Discovery D346 |
| 1345505 | Water sample data | 2010-02-10 10:03:00 | 24.51549 N, 24.84693 W | RRS Discovery D346 |
| 1018111 | CTD or STD cast | 2010-02-10 15:58:39 | 24.4998 N, 24.1647 W | RRS Discovery D346 |
| 1343418 | Water sample data | 2010-02-10 17:49:00 | 24.50054 N, 24.16319 W | RRS Discovery D346 |
| 1345517 | Water sample data | 2010-02-10 17:49:00 | 24.50054 N, 24.16319 W | RRS Discovery D346 |
| 1018123 | CTD or STD cast | 2010-02-10 23:29:08 | 24.4942 N, 23.501 W | RRS Discovery D346 |
| 1343431 | Water sample data | 2010-02-11 01:17:00 | 24.49592 N, 23.50076 W | RRS Discovery D346 |
| 1345529 | Water sample data | 2010-02-11 01:17:00 | 24.49592 N, 23.50076 W | RRS Discovery D346 |
| 1018135 | CTD or STD cast | 2010-02-11 06:51:19 | 24.7142 N, 22.8842 W | RRS Discovery D346 |
| 1343443 | Water sample data | 2010-02-11 08:37:30 | 24.71531 N, 22.88196 W | RRS Discovery D346 |
| 1345530 | Water sample data | 2010-02-11 08:37:30 | 24.71531 N, 22.88196 W | RRS Discovery D346 |
| 1018147 | CTD or STD cast | 2010-02-11 14:07:15 | 24.9187 N, 22.2656 W | RRS Discovery D346 |
| 1343455 | Water sample data | 2010-02-11 15:47:30 | 24.91937 N, 22.2652 W | RRS Discovery D346 |
| 1345542 | Water sample data | 2010-02-11 15:47:30 | 24.91937 N, 22.2652 W | RRS Discovery D346 |
| 1018159 | CTD or STD cast | 2010-02-11 21:09:19 | 25.1367 N, 21.6523 W | RRS Discovery D346 |
| 1343467 | Water sample data | 2010-02-11 22:42:30 | 25.13793 N, 21.6519 W | RRS Discovery D346 |
| 1345554 | Water sample data | 2010-02-11 22:42:30 | 25.13793 N, 21.6519 W | RRS Discovery D346 |
| 1018160 | CTD or STD cast | 2010-02-12 03:51:43 | 25.3346 N, 21.0304 W | RRS Discovery D346 |
| 1343479 | Water sample data | 2010-02-12 05:24:30 | 25.33535 N, 21.03194 W | RRS Discovery D346 |
| 1345566 | Water sample data | 2010-02-12 05:24:30 | 25.33535 N, 21.03194 W | RRS Discovery D346 |
| 1018172 | CTD or STD cast | 2010-02-12 10:32:14 | 25.5458 N, 20.4184 W | RRS Discovery D346 |
| 1343480 | Water sample data | 2010-02-12 12:03:00 | 25.54707 N, 20.41807 W | RRS Discovery D346 |
| 1345578 | Water sample data | 2010-02-12 12:03:00 | 25.54707 N, 20.41807 W | RRS Discovery D346 |
| 1018184 | CTD or STD cast | 2010-02-12 17:10:41 | 25.7426 N, 19.7968 W | RRS Discovery D346 |
| 1343492 | Water sample data | 2010-02-12 18:35:30 | 25.74195 N, 19.79598 W | RRS Discovery D346 |
| 1345591 | Water sample data | 2010-02-12 18:35:30 | 25.74195 N, 19.79598 W | RRS Discovery D346 |
| 1018196 | CTD or STD cast | 2010-02-12 23:39:53 | 25.9624 N, 19.1884 W | RRS Discovery D346 |
| 1343511 | Water sample data | 2010-02-13 00:55:30 | 25.9632 N, 19.18957 W | RRS Discovery D346 |
| 1345609 | Water sample data | 2010-02-13 00:55:30 | 25.9632 N, 19.18957 W | RRS Discovery D346 |
| 1018203 | CTD or STD cast | 2010-02-13 05:53:44 | 26.1676 N, 18.5738 W | RRS Discovery D346 |
| 1343523 | Water sample data | 2010-02-13 07:12:30 | 26.16697 N, 18.57381 W | RRS Discovery D346 |
| 1345610 | Water sample data | 2010-02-13 07:12:30 | 26.16697 N, 18.57381 W | RRS Discovery D346 |
| 1018215 | CTD or STD cast | 2010-02-13 12:12:53 | 26.3764 N, 17.959 W | RRS Discovery D346 |
| 1343535 | Water sample data | 2010-02-13 13:35:00 | 26.37611 N, 17.96116 W | RRS Discovery D346 |
| 1345622 | Water sample data | 2010-02-13 13:35:00 | 26.37611 N, 17.96116 W | RRS Discovery D346 |
| 1018227 | CTD or STD cast | 2010-02-13 18:40:12 | 26.5763 N, 17.3344 W | RRS Discovery D346 |
| 1343547 | Water sample data | 2010-02-13 19:58:00 | 26.57625 N, 17.33568 W | RRS Discovery D346 |
| 1345634 | Water sample data | 2010-02-13 19:58:00 | 26.57625 N, 17.33568 W | RRS Discovery D346 |
| 1018239 | CTD or STD cast | 2010-02-14 01:05:26 | 26.7898 N, 16.7151 W | RRS Discovery D346 |
| 1343559 | Water sample data | 2010-02-14 02:27:00 | 26.78982 N, 16.71396 W | RRS Discovery D346 |
| 1345646 | Water sample data | 2010-02-14 02:27:00 | 26.78982 N, 16.71396 W | RRS Discovery D346 |
| 1018240 | CTD or STD cast | 2010-02-14 07:21:05 | 26.9886 N, 16.0968 W | RRS Discovery D346 |
| 1343560 | Water sample data | 2010-02-14 08:39:30 | 26.98827 N, 16.09626 W | RRS Discovery D346 |
| 1345658 | Water sample data | 2010-02-14 08:39:30 | 26.98827 N, 16.09626 W | RRS Discovery D346 |
| 1018252 | CTD or STD cast | 2010-02-14 13:39:01 | 27.1971 N, 15.483 W | RRS Discovery D346 |
| 1343572 | Water sample data | 2010-02-14 14:54:30 | 27.19634 N, 15.48435 W | RRS Discovery D346 |
| 1345671 | Water sample data | 2010-02-14 14:54:30 | 27.19634 N, 15.48435 W | RRS Discovery D346 |
| 1018264 | CTD or STD cast | 2010-02-14 19:50:24 | 27.4145 N, 14.8686 W | RRS Discovery D346 |
| 1343584 | Water sample data | 2010-02-14 20:56:30 | 27.41372 N, 14.8685 W | RRS Discovery D346 |
| 1345683 | Water sample data | 2010-02-14 20:56:30 | 27.41372 N, 14.8685 W | RRS Discovery D346 |
| 1018276 | CTD or STD cast | 2010-02-15 01:50:00 | 27.6229 N, 14.2368 W | RRS Discovery D346 |
| 1343596 | Water sample data | 2010-02-15 02:40:30 | 27.6221 N, 14.23772 W | RRS Discovery D346 |
| 1345695 | Water sample data | 2010-02-15 02:40:30 | 27.6221 N, 14.23772 W | RRS Discovery D346 |
| 1018288 | CTD or STD cast | 2010-02-15 06:33:01 | 27.7894 N, 13.7772 W | RRS Discovery D346 |
| 1343603 | Water sample data | 2010-02-15 07:23:30 | 27.78881 N, 13.77898 W | RRS Discovery D346 |
| 1345702 | Water sample data | 2010-02-15 07:23:30 | 27.78881 N, 13.77898 W | RRS Discovery D346 |
| 1018307 | CTD or STD cast | 2010-02-15 10:15:31 | 27.8667 N, 13.5561 W | RRS Discovery D346 |
| 1343615 | Water sample data | 2010-02-15 10:48:30 | 27.86678 N, 13.55629 W | RRS Discovery D346 |
| 1345714 | Water sample data | 2010-02-15 10:48:30 | 27.86678 N, 13.55629 W | RRS Discovery D346 |
| 1018319 | CTD or STD cast | 2010-02-15 13:02:52 | 27.9113 N, 13.4101 W | RRS Discovery D346 |
| 1343627 | Water sample data | 2010-02-15 13:25:00 | 27.911 N, 13.41072 W | RRS Discovery D346 |
| 1345726 | Water sample data | 2010-02-15 13:25:00 | 27.911 N, 13.41072 W | RRS Discovery D346 |
| 1018320 | CTD or STD cast | 2010-02-15 15:25:16 | 27.9275 N, 13.3692 W | RRS Discovery D346 |
| 1343639 | Water sample data | 2010-02-15 15:43:00 | 27.92782 N, 13.36938 W | RRS Discovery D346 |
| 1345738 | Water sample data | 2010-02-15 15:43:00 | 27.92782 N, 13.36938 W | RRS Discovery D346 |
| 1816672 | Currents -subsurface Eulerian | 2015-12-06 23:30:39 | 25.08129 N, 77.33905 W | RRS Discovery DY040 |
| 1816660 | Currents -subsurface Eulerian | 2015-12-06 23:50:53 | 25.08343 N, 77.34695 W | RRS Discovery DY040 |
| 1843817 | CTD or STD cast | 2015-12-09 21:27:40 | 26.4336 N, 78.6669 W | RRS Discovery DY040 |
| 1894909 | Water sample data | 2015-12-09 21:48:00 | 26.4336 N, 78.66688 W | RRS Discovery DY040 |
| 1842236 | CTD or STD cast | 2015-12-10 06:51:36 | 27.0016 N, 79.9975 W | RRS Discovery DY040 |
| 1894910 | Water sample data | 2015-12-10 06:54:00 | 27.00157 N, 79.99747 W | RRS Discovery DY040 |
| 1842248 | CTD or STD cast | 2015-12-10 08:14:49 | 27.0038 N, 79.9681 W | RRS Discovery DY040 |
| 1894922 | Water sample data | 2015-12-10 08:20:00 | 27.00379 N, 79.96814 W | RRS Discovery DY040 |
| 1842261 | CTD or STD cast | 2015-12-10 09:47:52 | 27.0048 N, 79.9353 W | RRS Discovery DY040 |
| 1894934 | Water sample data | 2015-12-10 09:57:00 | 27.00485 N, 79.93531 W | RRS Discovery DY040 |
| 1842273 | CTD or STD cast | 2015-12-10 11:35:38 | 27.0079 N, 79.8679 W | RRS Discovery DY040 |
| 1894946 | Water sample data | 2015-12-10 11:44:00 | 27.0079 N, 79.86786 W | RRS Discovery DY040 |
| 1842285 | CTD or STD cast | 2015-12-10 14:19:13 | 27.0191 N, 79.7837 W | RRS Discovery DY040 |
| 1894958 | Water sample data | 2015-12-10 14:37:00 | 27.01906 N, 79.78371 W | RRS Discovery DY040 |
| 1842297 | CTD or STD cast | 2015-12-10 23:21:05 | 27.016 N, 79.7803 W | RRS Discovery DY040 |
| 1894971 | Water sample data | 2015-12-10 23:37:00 | 27.01603 N, 79.78029 W | RRS Discovery DY040 |
| 1842304 | CTD or STD cast | 2015-12-11 02:01:34 | 27.0161 N, 79.681 W | RRS Discovery DY040 |
| 1894983 | Water sample data | 2015-12-11 02:19:00 | 27.01611 N, 79.68102 W | RRS Discovery DY040 |
| 1842316 | CTD or STD cast | 2015-12-11 04:47:24 | 27.0135 N, 79.6161 W | RRS Discovery DY040 |
| 1894995 | Water sample data | 2015-12-11 05:03:00 | 27.01355 N, 79.61612 W | RRS Discovery DY040 |
| 1842328 | CTD or STD cast | 2015-12-11 07:32:18 | 27.0103 N, 79.4994 W | RRS Discovery DY040 |
| 1895009 | Water sample data | 2015-12-11 07:48:00 | 27.01026 N, 79.49937 W | RRS Discovery DY040 |
| 1842341 | CTD or STD cast | 2015-12-11 10:39:27 | 27.0074 N, 79.383 W | RRS Discovery DY040 |
| 1895010 | Water sample data | 2015-12-11 10:55:00 | 27.00736 N, 79.38295 W | RRS Discovery DY040 |
| 1842353 | CTD or STD cast | 2015-12-11 13:38:24 | 27.004 N, 79.2805 W | RRS Discovery DY040 |
| 1895022 | Water sample data | 2015-12-11 13:55:00 | 27.00401 N, 79.28046 W | RRS Discovery DY040 |
| 1842365 | CTD or STD cast | 2015-12-11 16:03:34 | 27.0005 N, 79.1985 W | RRS Discovery DY040 |
| 1895034 | Water sample data | 2015-12-11 16:17:00 | 27.00051 N, 79.19847 W | RRS Discovery DY040 |
| 1842377 | CTD or STD cast | 2015-12-11 18:05:23 | 27.0 N, 79.1751 W | RRS Discovery DY040 |
| 1895046 | Water sample data | 2015-12-11 18:16:00 | 26.99999 N, 79.17506 W | RRS Discovery DY040 |
| 1842389 | CTD or STD cast | 2015-12-11 21:19:44 | 26.9999 N, 79.1582 W | RRS Discovery DY040 |
| 1895058 | Water sample data | 2015-12-11 21:30:00 | 26.99987 N, 79.15816 W | RRS Discovery DY040 |
| 1842390 | CTD or STD cast | 2015-12-12 02:38:21 | 27.0037 N, 79.9312 W | RRS Discovery DY040 |
| 1842408 | CTD or STD cast | 2015-12-12 03:40:29 | 27.0062 N, 79.865 W | RRS Discovery DY040 |
| 1842421 | CTD or STD cast | 2015-12-12 05:09:31 | 27.0148 N, 79.7805 W | RRS Discovery DY040 |
| 1842433 | CTD or STD cast | 2015-12-12 06:39:31 | 27.0165 N, 79.6833 W | RRS Discovery DY040 |
| 1842445 | CTD or STD cast | 2015-12-12 08:04:32 | 27.0173 N, 79.617 W | RRS Discovery DY040 |
| 1842457 | CTD or STD cast | 2015-12-12 09:50:24 | 27.012 N, 79.5017 W | RRS Discovery DY040 |
| 1842469 | CTD or STD cast | 2015-12-12 12:03:47 | 27.0067 N, 79.384 W | RRS Discovery DY040 |
| 1842470 | CTD or STD cast | 2015-12-12 14:00:37 | 27.0014 N, 79.2833 W | RRS Discovery DY040 |
| 1842482 | CTD or STD cast | 2015-12-12 15:44:36 | 26.9985 N, 79.2 W | RRS Discovery DY040 |
| 1842494 | CTD or STD cast | 2015-12-13 14:10:18 | 26.5003 N, 76.9335 W | RRS Discovery DY040 |
| 1895071 | Water sample data | 2015-12-13 14:24:00 | 26.50026 N, 76.93345 W | RRS Discovery DY040 |
| 1842501 | CTD or STD cast | 2015-12-13 16:08:20 | 26.5001 N, 76.8671 W | RRS Discovery DY040 |
| 1895083 | Water sample data | 2015-12-13 16:44:00 | 26.50011 N, 76.86712 W | RRS Discovery DY040 |
| 1842513 | CTD or STD cast | 2015-12-13 18:42:23 | 26.5167 N, 76.8252 W | RRS Discovery DY040 |
| 1895095 | Water sample data | 2015-12-13 19:12:00 | 26.51674 N, 76.82522 W | RRS Discovery DY040 |
| 1842525 | CTD or STD cast | 2015-12-13 20:58:39 | 26.5001 N, 76.8002 W | RRS Discovery DY040 |
| 1895102 | Water sample data | 2015-12-13 21:27:00 | 26.5001 N, 76.80023 W | RRS Discovery DY040 |
| 1842537 | CTD or STD cast | 2015-12-13 23:30:18 | 26.5001 N, 76.7836 W | RRS Discovery DY040 |
| 1895114 | Water sample data | 2015-12-14 00:14:00 | 26.50006 N, 76.78357 W | RRS Discovery DY040 |
| 1842549 | CTD or STD cast | 2015-12-14 02:49:16 | 26.5002 N, 76.7586 W | RRS Discovery DY040 |
| 1895126 | Water sample data | 2015-12-14 04:05:00 | 26.50015 N, 76.75859 W | RRS Discovery DY040 |
| 1842550 | CTD or STD cast | 2015-12-14 07:37:57 | 26.5001 N, 76.6835 W | RRS Discovery DY040 |
| 1895138 | Water sample data | 2015-12-14 09:06:00 | 26.50014 N, 76.68353 W | RRS Discovery DY040 |
| 1842562 | CTD or STD cast | 2015-12-14 13:30:55 | 26.5002 N, 76.6168 W | RRS Discovery DY040 |
| 1895151 | Water sample data | 2015-12-14 14:58:00 | 26.50018 N, 76.61682 W | RRS Discovery DY040 |
| 1842574 | CTD or STD cast | 2015-12-14 18:33:11 | 26.4999 N, 76.5333 W | RRS Discovery DY040 |
| 1895163 | Water sample data | 2015-12-14 20:02:00 | 26.49995 N, 76.53331 W | RRS Discovery DY040 |
| 1842586 | CTD or STD cast | 2015-12-14 23:27:18 | 26.5 N, 76.4333 W | RRS Discovery DY040 |
| 1895175 | Water sample data | 2015-12-15 00:55:00 | 26.50002 N, 76.43329 W | RRS Discovery DY040 |
| 1842598 | CTD or STD cast | 2015-12-15 04:31:56 | 26.5003 N, 76.3002 W | RRS Discovery DY040 |
| 1895187 | Water sample data | 2015-12-15 05:56:00 | 26.50032 N, 76.3002 W | RRS Discovery DY040 |
| 1842605 | CTD or STD cast | 2015-12-15 09:41:45 | 26.5002 N, 76.2167 W | RRS Discovery DY040 |
| 1895199 | Water sample data | 2015-12-15 11:05:00 | 26.50021 N, 76.21672 W | RRS Discovery DY040 |
| 1842617 | CTD or STD cast | 2015-12-15 14:59:13 | 26.5002 N, 76.1002 W | RRS Discovery DY040 |
| 1895206 | Water sample data | 2015-12-15 16:27:00 | 26.50017 N, 76.10016 W | RRS Discovery DY040 |
| 1842629 | CTD or STD cast | 2015-12-18 06:44:57 | 26.5001 N, 76.1004 W | RRS Discovery DY040 |
| 1842630 | CTD or STD cast | 2015-12-18 11:20:29 | 26.5002 N, 75.9001 W | RRS Discovery DY040 |
| 1895218 | Water sample data | 2015-12-18 12:52:00 | 26.50018 N, 75.90009 W | RRS Discovery DY040 |
| 1842642 | CTD or STD cast | 2015-12-18 17:35:36 | 26.5003 N, 75.7003 W | RRS Discovery DY040 |
| 1895231 | Water sample data | 2015-12-18 18:59:00 | 26.50033 N, 75.70033 W | RRS Discovery DY040 |
| 1842654 | CTD or STD cast | 2015-12-18 22:38:31 | 26.5002 N, 75.5 W | RRS Discovery DY040 |
| 1895243 | Water sample data | 2015-12-19 00:01:00 | 26.50021 N, 75.50003 W | RRS Discovery DY040 |
| 1842666 | CTD or STD cast | 2015-12-19 03:36:08 | 26.5002 N, 75.3001 W | RRS Discovery DY040 |
| 1895255 | Water sample data | 2015-12-19 04:56:00 | 26.50017 N, 75.30015 W | RRS Discovery DY040 |
| 1842678 | CTD or STD cast | 2015-12-19 08:30:20 | 26.5007 N, 75.0672 W | RRS Discovery DY040 |
| 1895267 | Water sample data | 2015-12-19 09:59:00 | 26.5007 N, 75.06721 W | RRS Discovery DY040 |
| 1842691 | CTD or STD cast | 2015-12-19 14:14:23 | 26.4997 N, 74.8003 W | RRS Discovery DY040 |
| 1895279 | Water sample data | 2015-12-19 15:38:00 | 26.49974 N, 74.80026 W | RRS Discovery DY040 |
| 1842709 | CTD or STD cast | 2015-12-19 19:39:22 | 26.5004 N, 74.5191 W | RRS Discovery DY040 |
| 1895280 | Water sample data | 2015-12-19 21:02:00 | 26.50042 N, 74.51914 W | RRS Discovery DY040 |
| 1842710 | CTD or STD cast | 2015-12-20 01:32:16 | 26.4997 N, 74.2376 W | RRS Discovery DY040 |
| 1895292 | Water sample data | 2015-12-20 02:58:00 | 26.49966 N, 74.23763 W | RRS Discovery DY040 |
| 1842722 | CTD or STD cast | 2015-12-20 07:08:20 | 26.5007 N, 73.9345 W | RRS Discovery DY040 |
| 1895311 | Water sample data | 2015-12-20 08:31:00 | 26.5007 N, 73.93448 W | RRS Discovery DY040 |
| 1842734 | CTD or STD cast | 2015-12-20 13:28:41 | 26.4979 N, 73.5674 W | RRS Discovery DY040 |
| 1895323 | Water sample data | 2015-12-20 15:03:00 | 26.49786 N, 73.56736 W | RRS Discovery DY040 |
| 1842746 | CTD or STD cast | 2015-12-20 19:47:18 | 26.4994 N, 73.202 W | RRS Discovery DY040 |
| 1895335 | Water sample data | 2015-12-20 21:19:00 | 26.49937 N, 73.20201 W | RRS Discovery DY040 |
| 1842758 | CTD or STD cast | 2015-12-21 02:30:13 | 26.5031 N, 72.8416 W | RRS Discovery DY040 |
| 1895347 | Water sample data | 2015-12-21 04:03:00 | 26.50306 N, 72.8416 W | RRS Discovery DY040 |
| 1842771 | CTD or STD cast | 2015-12-21 09:39:54 | 26.4997 N, 72.3777 W | RRS Discovery DY040 |
| 1895359 | Water sample data | 2015-12-21 11:14:00 | 26.49972 N, 72.37774 W | RRS Discovery DY040 |
| 1842783 | CTD or STD cast | 2015-12-21 17:12:11 | 26.5002 N, 71.9172 W | RRS Discovery DY040 |
| 1895360 | Water sample data | 2015-12-21 18:48:00 | 26.5002 N, 71.91718 W | RRS Discovery DY040 |
| 1842795 | CTD or STD cast | 2015-12-22 00:01:57 | 26.5018 N, 71.4606 W | RRS Discovery DY040 |
| 1895372 | Water sample data | 2015-12-22 01:40:00 | 26.50182 N, 71.46056 W | RRS Discovery DY040 |
| 1842802 | CTD or STD cast | 2015-12-22 07:19:08 | 26.5001 N, 71.0002 W | RRS Discovery DY040 |
| 1895384 | Water sample data | 2015-12-22 08:57:00 | 26.50008 N, 71.00023 W | RRS Discovery DY040 |
| 1842814 | CTD or STD cast | 2015-12-22 16:13:27 | 25.9993 N, 70.5373 W | RRS Discovery DY040 |
| 1895396 | Water sample data | 2015-12-22 17:54:00 | 25.99935 N, 70.53731 W | RRS Discovery DY040 |
| 1842826 | CTD or STD cast | 2015-12-23 00:49:54 | 25.5032 N, 70.0774 W | RRS Discovery DY040 |
| 1895403 | Water sample data | 2015-12-23 02:33:00 | 25.50317 N, 70.07744 W | RRS Discovery DY040 |
| 1842838 | CTD or STD cast | 2015-12-23 09:28:15 | 25.0035 N, 69.615 W | RRS Discovery DY040 |
| 1895415 | Water sample data | 2015-12-23 11:06:00 | 25.00353 N, 69.61504 W | RRS Discovery DY040 |
| 1842851 | CTD or STD cast | 2015-12-23 18:19:34 | 24.4996 N, 69.1511 W | RRS Discovery DY040 |
| 1895427 | Water sample data | 2015-12-23 20:01:00 | 24.49958 N, 69.15108 W | RRS Discovery DY040 |
| 1842863 | CTD or STD cast | 2015-12-24 03:32:56 | 24.5009 N, 68.417 W | RRS Discovery DY040 |
| 1895439 | Water sample data | 2015-12-24 05:11:00 | 24.50095 N, 68.41702 W | RRS Discovery DY040 |
| 1842875 | CTD or STD cast | 2015-12-24 12:30:26 | 24.5 N, 67.6849 W | RRS Discovery DY040 |
| 1895440 | Water sample data | 2015-12-24 14:13:00 | 24.50003 N, 67.68494 W | RRS Discovery DY040 |
| 1842887 | CTD or STD cast | 2015-12-24 22:17:38 | 24.5011 N, 66.9543 W | RRS Discovery DY040 |
| 1895452 | Water sample data | 2015-12-25 00:01:00 | 24.50106 N, 66.95433 W | RRS Discovery DY040 |
| 1842899 | CTD or STD cast | 2015-12-25 07:34:50 | 24.5 N, 66.2176 W | RRS Discovery DY040 |
| 1895464 | Water sample data | 2015-12-25 09:06:00 | 24.49999 N, 66.21761 W | RRS Discovery DY040 |
| 1842906 | CTD or STD cast | 2015-12-25 12:54:14 | 24.4964 N, 66.0287 W | RRS Discovery DY040 |
| 1895476 | Water sample data | 2015-12-25 14:41:00 | 24.49641 N, 66.02868 W | RRS Discovery DY040 |
| 1842918 | CTD or STD cast | 2015-12-25 20:08:00 | 24.4998 N, 65.4843 W | RRS Discovery DY040 |
| 1895488 | Water sample data | 2015-12-25 21:43:00 | 24.49975 N, 65.48434 W | RRS Discovery DY040 |
| 1842931 | CTD or STD cast | 2015-12-26 04:58:19 | 24.4994 N, 64.7511 W | RRS Discovery DY040 |
| 1895507 | Water sample data | 2015-12-26 06:40:00 | 24.49944 N, 64.75113 W | RRS Discovery DY040 |
| 1842943 | CTD or STD cast | 2015-12-26 14:53:09 | 24.4994 N, 64.0166 W | RRS Discovery DY040 |
| 1895519 | Water sample data | 2015-12-26 16:37:00 | 24.49939 N, 64.0166 W | RRS Discovery DY040 |
| 1842955 | CTD or STD cast | 2015-12-27 00:00:24 | 24.5023 N, 63.2847 W | RRS Discovery DY040 |
| 1895520 | Water sample data | 2015-12-27 01:43:00 | 24.50234 N, 63.28468 W | RRS Discovery DY040 |
| 1842967 | CTD or STD cast | 2015-12-27 09:07:59 | 24.503 N, 62.5543 W | RRS Discovery DY040 |
| 1895532 | Water sample data | 2015-12-27 10:49:00 | 24.50299 N, 62.5543 W | RRS Discovery DY040 |
| 1842979 | CTD or STD cast | 2015-12-27 18:06:49 | 24.4997 N, 61.8174 W | RRS Discovery DY040 |
| 1895544 | Water sample data | 2015-12-27 19:48:00 | 24.4997 N, 61.8174 W | RRS Discovery DY040 |
| 1842980 | CTD or STD cast | 2015-12-28 03:04:01 | 24.5004 N, 61.0834 W | RRS Discovery DY040 |
| 1895556 | Water sample data | 2015-12-28 04:43:00 | 24.50036 N, 61.08344 W | RRS Discovery DY040 |
| 1842992 | CTD or STD cast | 2015-12-28 11:39:32 | 24.4992 N, 60.3509 W | RRS Discovery DY040 |
| 1895568 | Water sample data | 2015-12-28 13:24:00 | 24.49924 N, 60.3509 W | RRS Discovery DY040 |
| 1843006 | CTD or STD cast | 2015-12-28 20:11:09 | 24.5002 N, 59.6163 W | RRS Discovery DY040 |
| 1895581 | Water sample data | 2015-12-28 21:56:00 | 24.50015 N, 59.61628 W | RRS Discovery DY040 |
| 1843018 | CTD or STD cast | 2015-12-29 04:28:19 | 24.4995 N, 58.8832 W | RRS Discovery DY040 |
| 1895593 | Water sample data | 2015-12-29 06:07:00 | 24.49949 N, 58.88324 W | RRS Discovery DY040 |
| 1843031 | CTD or STD cast | 2015-12-29 12:46:35 | 24.5 N, 58.1505 W | RRS Discovery DY040 |
| 1895600 | Water sample data | 2015-12-29 14:32:00 | 24.50002 N, 58.15049 W | RRS Discovery DY040 |
| 1843043 | CTD or STD cast | 2015-12-29 21:13:25 | 24.5021 N, 57.4169 W | RRS Discovery DY040 |
| 1895612 | Water sample data | 2015-12-29 23:01:00 | 24.50206 N, 57.41692 W | RRS Discovery DY040 |
| 1843055 | CTD or STD cast | 2015-12-30 05:26:36 | 24.5 N, 56.6834 W | RRS Discovery DY040 |
| 1895624 | Water sample data | 2015-12-30 07:14:00 | 24.5 N, 56.68337 W | RRS Discovery DY040 |
| 1843067 | CTD or STD cast | 2015-12-30 14:03:40 | 24.5 N, 55.9505 W | RRS Discovery DY040 |
| 1895636 | Water sample data | 2015-12-30 15:54:00 | 24.49998 N, 55.95053 W | RRS Discovery DY040 |
| 1843079 | CTD or STD cast | 2015-12-30 22:25:32 | 24.5003 N, 55.2185 W | RRS Discovery DY040 |
| 1895648 | Water sample data | 2015-12-31 00:21:00 | 24.50027 N, 55.21845 W | RRS Discovery DY040 |
| 1843080 | CTD or STD cast | 2015-12-31 06:43:58 | 24.5001 N, 54.4831 W | RRS Discovery DY040 |
| 1895661 | Water sample data | 2015-12-31 08:11:00 | 24.50013 N, 54.4831 W | RRS Discovery DY040 |
| 1843092 | CTD or STD cast | 2015-12-31 14:46:59 | 24.4996 N, 53.751 W | RRS Discovery DY040 |
| 1895673 | Water sample data | 2015-12-31 16:30:00 | 24.49957 N, 53.75104 W | RRS Discovery DY040 |
| 1843111 | CTD or STD cast | 2015-12-31 23:03:24 | 24.5006 N, 53.0179 W | RRS Discovery DY040 |
| 1895685 | Water sample data | 2016-01-01 00:40:00 | 24.50058 N, 53.01792 W | RRS Discovery DY040 |
| 1843123 | CTD or STD cast | 2016-01-01 07:00:37 | 24.5 N, 52.2839 W | RRS Discovery DY040 |
| 1895697 | Water sample data | 2016-01-01 08:40:00 | 24.49995 N, 52.28386 W | RRS Discovery DY040 |
| 1843135 | CTD or STD cast | 2016-01-01 15:06:23 | 24.5001 N, 51.5502 W | RRS Discovery DY040 |
| 1895704 | Water sample data | 2016-01-01 16:41:00 | 24.50015 N, 51.55017 W | RRS Discovery DY040 |
| 1843147 | CTD or STD cast | 2016-01-01 22:53:23 | 24.4996 N, 50.8158 W | RRS Discovery DY040 |
| 1895716 | Water sample data | 2016-01-02 00:28:00 | 24.49963 N, 50.81579 W | RRS Discovery DY040 |
| 1843159 | CTD or STD cast | 2016-01-02 06:37:51 | 24.5005 N, 50.0834 W | RRS Discovery DY040 |
| 1895728 | Water sample data | 2016-01-02 08:02:00 | 24.50051 N, 50.08341 W | RRS Discovery DY040 |
| 1843160 | CTD or STD cast | 2016-01-02 14:15:36 | 24.5004 N, 49.35 W | RRS Discovery DY040 |
| 1895741 | Water sample data | 2016-01-02 15:55:00 | 24.50039 N, 49.34996 W | RRS Discovery DY040 |
| 1843172 | CTD or STD cast | 2016-01-02 23:56:14 | 24.4991 N, 48.6174 W | RRS Discovery DY040 |
| 1895753 | Water sample data | 2016-01-03 01:06:00 | 24.49911 N, 48.61735 W | RRS Discovery DY040 |
| 1843184 | CTD or STD cast | 2016-01-03 07:14:28 | 24.5005 N, 47.8833 W | RRS Discovery DY040 |
| 1895765 | Water sample data | 2016-01-03 08:25:00 | 24.50049 N, 47.88333 W | RRS Discovery DY040 |
| 1843196 | CTD or STD cast | 2016-01-03 14:25:42 | 24.4992 N, 47.1503 W | RRS Discovery DY040 |
| 1895777 | Water sample data | 2016-01-03 15:35:00 | 24.49925 N, 47.15029 W | RRS Discovery DY040 |
| 1843203 | CTD or STD cast | 2016-01-03 20:52:59 | 24.4999 N, 46.5003 W | RRS Discovery DY040 |
| 1895789 | Water sample data | 2016-01-03 21:59:00 | 24.49989 N, 46.50032 W | RRS Discovery DY040 |
| 1843215 | CTD or STD cast | 2016-01-04 03:17:41 | 24.5004 N, 45.8509 W | RRS Discovery DY040 |
| 1895790 | Water sample data | 2016-01-04 04:14:00 | 24.5004 N, 45.85088 W | RRS Discovery DY040 |
| 1843227 | CTD or STD cast | 2016-01-04 09:13:58 | 24.4992 N, 45.1999 W | RRS Discovery DY040 |
| 1895808 | Water sample data | 2016-01-04 10:17:00 | 24.49925 N, 45.19992 W | RRS Discovery DY040 |
| 1843239 | CTD or STD cast | 2016-01-04 15:54:52 | 24.5003 N, 44.551 W | RRS Discovery DY040 |
| 1895821 | Water sample data | 2016-01-04 17:07:00 | 24.50032 N, 44.55096 W | RRS Discovery DY040 |
| 1843240 | CTD or STD cast | 2016-01-04 22:38:23 | 24.5 N, 43.9015 W | RRS Discovery DY040 |
| 1895833 | Water sample data | 2016-01-04 23:51:00 | 24.49998 N, 43.90148 W | RRS Discovery DY040 |
| 1843252 | CTD or STD cast | 2016-01-05 05:10:34 | 24.5001 N, 43.251 W | RRS Discovery DY040 |
| 1895845 | Water sample data | 2016-01-05 06:14:00 | 24.5001 N, 43.25099 W | RRS Discovery DY040 |
| 1843264 | CTD or STD cast | 2016-01-05 12:03:09 | 24.5002 N, 42.6004 W | RRS Discovery DY040 |
| 1895857 | Water sample data | 2016-01-05 13:22:00 | 24.50019 N, 42.60044 W | RRS Discovery DY040 |
| 1843276 | CTD or STD cast | 2016-01-05 19:19:18 | 24.4989 N, 41.9512 W | RRS Discovery DY040 |
| 1895869 | Water sample data | 2016-01-05 20:34:00 | 24.49891 N, 41.95117 W | RRS Discovery DY040 |
| 1843288 | CTD or STD cast | 2016-01-06 02:25:18 | 24.5 N, 41.3005 W | RRS Discovery DY040 |
| 1895870 | Water sample data | 2016-01-06 03:49:00 | 24.50001 N, 41.30048 W | RRS Discovery DY040 |
| 1843307 | CTD or STD cast | 2016-01-06 09:29:19 | 24.4995 N, 40.6491 W | RRS Discovery DY040 |
| 1895882 | Water sample data | 2016-01-06 11:01:00 | 24.49952 N, 40.64905 W | RRS Discovery DY040 |
| 1843319 | CTD or STD cast | 2016-01-06 16:50:45 | 24.4995 N, 40.0008 W | RRS Discovery DY040 |
| 1895894 | Water sample data | 2016-01-06 18:30:00 | 24.49953 N, 40.00082 W | RRS Discovery DY040 |
| 1843320 | CTD or STD cast | 2016-01-07 00:31:26 | 24.5007 N, 39.3502 W | RRS Discovery DY040 |
| 1895901 | Water sample data | 2016-01-07 02:02:00 | 24.50065 N, 39.35024 W | RRS Discovery DY040 |
| 1843332 | CTD or STD cast | 2016-01-07 07:34:52 | 24.5022 N, 38.6992 W | RRS Discovery DY040 |
| 1895913 | Water sample data | 2016-01-07 08:59:00 | 24.50221 N, 38.69916 W | RRS Discovery DY040 |
| 1843344 | CTD or STD cast | 2016-01-07 14:31:36 | 24.4992 N, 38.0671 W | RRS Discovery DY040 |
| 1895925 | Water sample data | 2016-01-07 16:10:00 | 24.49918 N, 38.06709 W | RRS Discovery DY040 |
| 1843356 | CTD or STD cast | 2016-01-07 21:39:49 | 24.5015 N, 37.4338 W | RRS Discovery DY040 |
| 1895937 | Water sample data | 2016-01-07 23:29:00 | 24.50153 N, 37.43381 W | RRS Discovery DY040 |
| 1843368 | CTD or STD cast | 2016-01-08 05:09:35 | 24.4996 N, 36.8003 W | RRS Discovery DY040 |
| 1895949 | Water sample data | 2016-01-08 06:58:00 | 24.49959 N, 36.80033 W | RRS Discovery DY040 |
| 1843381 | CTD or STD cast | 2016-01-08 12:54:51 | 24.4999 N, 36.1674 W | RRS Discovery DY040 |
| 1895950 | Water sample data | 2016-01-08 14:38:00 | 24.49994 N, 36.16738 W | RRS Discovery DY040 |
| 1843393 | CTD or STD cast | 2016-01-08 20:22:58 | 24.5024 N, 35.5341 W | RRS Discovery DY040 |
| 1895962 | Water sample data | 2016-01-08 22:03:00 | 24.50236 N, 35.5341 W | RRS Discovery DY040 |
| 1843400 | CTD or STD cast | 2016-01-09 03:31:59 | 24.4997 N, 34.8998 W | RRS Discovery DY040 |
| 1895974 | Water sample data | 2016-01-09 05:21:00 | 24.4997 N, 34.89983 W | RRS Discovery DY040 |
| 1843412 | CTD or STD cast | 2016-01-09 11:29:56 | 24.5 N, 34.2668 W | RRS Discovery DY040 |
| 1895986 | Water sample data | 2016-01-09 13:15:00 | 24.50004 N, 34.26684 W | RRS Discovery DY040 |
| 1843424 | CTD or STD cast | 2016-01-09 19:07:42 | 24.5017 N, 33.6359 W | RRS Discovery DY040 |
| 1895998 | Water sample data | 2016-01-09 20:51:00 | 24.50173 N, 33.63592 W | RRS Discovery DY040 |
| 1843436 | CTD or STD cast | 2016-01-10 02:48:42 | 24.5003 N, 33.0 W | RRS Discovery DY040 |
| 1896001 | Water sample data | 2016-01-10 04:32:00 | 24.5003 N, 33.0 W | RRS Discovery DY040 |
| 1843448 | CTD or STD cast | 2016-01-10 10:32:56 | 24.5008 N, 32.3659 W | RRS Discovery DY040 |
| 1896013 | Water sample data | 2016-01-10 12:14:00 | 24.50082 N, 32.36592 W | RRS Discovery DY040 |
| 1843461 | CTD or STD cast | 2016-01-10 17:59:44 | 24.5006 N, 31.7335 W | RRS Discovery DY040 |
| 1896025 | Water sample data | 2016-01-10 19:51:00 | 24.50056 N, 31.7335 W | RRS Discovery DY040 |
| 1843473 | CTD or STD cast | 2016-01-11 01:45:47 | 24.5002 N, 31.0998 W | RRS Discovery DY040 |
| 1896037 | Water sample data | 2016-01-11 03:27:00 | 24.5002 N, 31.09981 W | RRS Discovery DY040 |
| 1843485 | CTD or STD cast | 2016-01-11 08:58:24 | 24.4989 N, 30.4675 W | RRS Discovery DY040 |
| 1896049 | Water sample data | 2016-01-11 10:43:00 | 24.49885 N, 30.46751 W | RRS Discovery DY040 |
| 1843497 | CTD or STD cast | 2016-01-11 16:36:18 | 24.5002 N, 29.8335 W | RRS Discovery DY040 |
| 1896050 | Water sample data | 2016-01-11 18:12:00 | 24.50024 N, 29.83353 W | RRS Discovery DY040 |
| 1843504 | CTD or STD cast | 2016-01-11 23:59:25 | 24.5 N, 29.1999 W | RRS Discovery DY040 |
| 1896062 | Water sample data | 2016-01-12 01:44:00 | 24.50004 N, 29.19988 W | RRS Discovery DY040 |
| 1843516 | CTD or STD cast | 2016-01-12 07:29:36 | 24.5001 N, 28.5684 W | RRS Discovery DY040 |
| 1843528 | CTD or STD cast | 2016-01-12 15:30:33 | 24.4997 N, 27.9335 W | RRS Discovery DY040 |
| 1843541 | CTD or STD cast | 2016-01-14 08:55:59 | 24.5028 N, 27.214 W | RRS Discovery DY040 |
| 1843553 | CTD or STD cast | 2016-01-14 17:09:27 | 24.5003 N, 26.4748 W | RRS Discovery DY040 |
| 1843565 | CTD or STD cast | 2016-01-15 01:11:14 | 24.5007 N, 25.7332 W | RRS Discovery DY040 |
| 1843577 | CTD or STD cast | 2016-01-15 06:52:34 | 24.4985 N, 25.3573 W | RRS Discovery DY040 |
| 1843589 | CTD or STD cast | 2016-01-15 12:26:59 | 24.4998 N, 24.9919 W | RRS Discovery DY040 |
| 1843590 | CTD or STD cast | 2016-01-15 20:13:44 | 24.4983 N, 24.2501 W | RRS Discovery DY040 |
| 1843608 | CTD or STD cast | 2016-01-16 04:06:04 | 24.4998 N, 23.5003 W | RRS Discovery DY040 |
| 1843621 | CTD or STD cast | 2016-01-16 11:40:39 | 24.7082 N, 22.8835 W | RRS Discovery DY040 |
| 1843633 | CTD or STD cast | 2016-01-16 18:48:00 | 24.9169 N, 22.2672 W | RRS Discovery DY040 |
| 1843645 | CTD or STD cast | 2016-01-17 02:06:48 | 25.1261 N, 21.6498 W | RRS Discovery DY040 |
| 1843657 | CTD or STD cast | 2016-01-17 08:59:13 | 25.3344 N, 21.0338 W | RRS Discovery DY040 |
| 1843669 | CTD or STD cast | 2016-01-17 16:01:12 | 25.5426 N, 20.4175 W | RRS Discovery DY040 |
| 1843670 | CTD or STD cast | 2016-01-17 22:55:38 | 25.7513 N, 19.8005 W | RRS Discovery DY040 |
| 1843682 | CTD or STD cast | 2016-01-18 05:24:03 | 25.9609 N, 19.1836 W | RRS Discovery DY040 |
| 1843694 | CTD or STD cast | 2016-01-18 11:54:57 | 26.168 N, 18.5669 W | RRS Discovery DY040 |
| 1843701 | CTD or STD cast | 2016-01-18 18:21:09 | 26.3783 N, 17.9508 W | RRS Discovery DY040 |
| 1843713 | CTD or STD cast | 2016-01-19 00:54:42 | 26.5855 N, 17.3335 W | RRS Discovery DY040 |
| 1843725 | CTD or STD cast | 2016-01-19 07:14:47 | 26.7954 N, 16.7178 W | RRS Discovery DY040 |
| 1843737 | CTD or STD cast | 2016-01-19 13:59:23 | 27.0026 N, 16.1008 W | RRS Discovery DY040 |
| 1843749 | CTD or STD cast | 2016-01-19 21:43:47 | 27.2109 N, 15.4835 W | RRS Discovery DY040 |
| 1843750 | CTD or STD cast | 2016-01-20 03:50:14 | 27.42 N, 14.8689 W | RRS Discovery DY040 |
| 1843762 | CTD or STD cast | 2016-01-20 09:59:26 | 27.6291 N, 14.2511 W | RRS Discovery DY040 |
| 1843774 | CTD or STD cast | 2016-01-20 14:45:31 | 27.7856 N, 13.7843 W | RRS Discovery DY040 |
| 1843786 | CTD or STD cast | 2016-01-20 17:33:05 | 27.8653 N, 13.5508 W | RRS Discovery DY040 |
| 1843798 | CTD or STD cast | 2016-01-20 19:47:02 | 27.9133 N, 13.4086 W | RRS Discovery DY040 |
| 1843805 | CTD or STD cast | 2016-01-20 21:27:09 | 27.9267 N, 13.3671 W | RRS Discovery DY040 |
| 1896086 | Water sample data | 2016-01-12 17:14:00 | 24.49965 N, 27.93349 W | RRS Discovery DY040 |
| 1896098 | Water sample data | 2016-01-14 10:34:00 | 24.50282 N, 27.21398 W | RRS Discovery DY040 |
| 1896105 | Water sample data | 2016-01-14 18:47:00 | 24.50033 N, 26.47485 W | RRS Discovery DY040 |
| 1896117 | Water sample data | 2016-01-15 02:45:00 | 24.50074 N, 25.73321 W | RRS Discovery DY040 |
| 1896129 | Water sample data | 2016-01-15 14:02:00 | 24.49976 N, 24.99189 W | RRS Discovery DY040 |
| 1896130 | Water sample data | 2016-01-15 21:46:00 | 24.49831 N, 24.25008 W | RRS Discovery DY040 |
| 1896142 | Water sample data | 2016-01-16 05:46:00 | 24.4998 N, 23.5003 W | RRS Discovery DY040 |
| 1896154 | Water sample data | 2016-01-16 13:09:00 | 24.70819 N, 22.88352 W | RRS Discovery DY040 |
| 1896166 | Water sample data | 2016-01-16 20:18:00 | 24.91691 N, 22.26717 W | RRS Discovery DY040 |
| 1896178 | Water sample data | 2016-01-17 03:29:00 | 25.12609 N, 21.64978 W | RRS Discovery DY040 |
| 1896191 | Water sample data | 2016-01-17 10:22:00 | 25.33439 N, 21.03379 W | RRS Discovery DY040 |
| 1896209 | Water sample data | 2016-01-17 17:18:00 | 25.54257 N, 20.41748 W | RRS Discovery DY040 |
| 1896210 | Water sample data | 2016-01-18 00:05:00 | 25.75129 N, 19.80046 W | RRS Discovery DY040 |
| 1896222 | Water sample data | 2016-01-18 06:31:00 | 25.96091 N, 19.18355 W | RRS Discovery DY040 |
| 1896234 | Water sample data | 2016-01-18 12:57:00 | 26.16805 N, 18.56688 W | RRS Discovery DY040 |
| 1896246 | Water sample data | 2016-01-18 19:29:00 | 26.37832 N, 17.95081 W | RRS Discovery DY040 |
| 1896258 | Water sample data | 2016-01-19 01:59:00 | 26.58552 N, 17.33351 W | RRS Discovery DY040 |
| 1896271 | Water sample data | 2016-01-19 08:27:00 | 26.79537 N, 16.7178 W | RRS Discovery DY040 |
| 1896283 | Water sample data | 2016-01-19 15:02:00 | 27.00256 N, 16.1008 W | RRS Discovery DY040 |
| 1896295 | Water sample data | 2016-01-19 22:39:00 | 27.21087 N, 15.48352 W | RRS Discovery DY040 |
| 1896302 | Water sample data | 2016-01-20 04:39:00 | 27.41999 N, 14.86894 W | RRS Discovery DY040 |
| 1896314 | Water sample data | 2016-01-20 10:40:00 | 27.62906 N, 14.25112 W | RRS Discovery DY040 |
| 1896326 | Water sample data | 2016-01-20 15:15:00 | 27.78556 N, 13.78429 W | RRS Discovery DY040 |
| 1896338 | Water sample data | 2016-01-20 17:58:00 | 27.86528 N, 13.55085 W | RRS Discovery DY040 |
| 1896351 | Water sample data | 2016-01-20 20:05:00 | 27.91334 N, 13.40859 W | RRS Discovery DY040 |
| 1896363 | Water sample data | 2016-01-20 21:38:00 | 27.92669 N, 13.36707 W | RRS Discovery DY040 |
| 2026483 | Currents -subsurface Eulerian | 2020-01-19 19:25:56 | 26.50885 N, 78.82784 W | RRS James Cook JC191 |
| 2026495 | Currents -subsurface Eulerian | 2020-01-19 19:25:57 | 26.50886 N, 78.82783 W | RRS James Cook JC191 |
| 2023995 | CTD or STD cast | 2020-01-20 00:01:12 | 26.4335 N, 78.667 W | RRS James Cook JC191 |
| 2204938 | Currents -subsurface Eulerian | 2020-01-20 00:01:12 | 26.43346 N, 78.66696 W | RRS James Cook JC191 |
| 2025455 | CTD or STD cast | 2020-01-20 14:18:18 | 26.9997 N, 80.0011 W | RRS James Cook JC191 |
| 2290125 | Water sample data | 2020-01-20 14:18:18 | 26.9997 N, 80.0011 W | RRS James Cook JC191 |
| 2024009 | CTD or STD cast | 2020-01-20 15:44:53 | 27.0055 N, 79.9883 W | RRS James Cook JC191 |
| 2290137 | Water sample data | 2020-01-20 15:44:53 | 27.0055 N, 79.9883 W | RRS James Cook JC191 |
| 2024010 | CTD or STD cast | 2020-01-20 18:14:38 | 27.0125 N, 79.9326 W | RRS James Cook JC191 |
| 2290149 | Water sample data | 2020-01-20 18:14:38 | 27.0125 N, 79.9326 W | RRS James Cook JC191 |
| 2024022 | CTD or STD cast | 2020-01-20 21:12:54 | 27.0145 N, 79.8662 W | RRS James Cook JC191 |
| 2203554 | Currents -subsurface Eulerian | 2020-01-20 21:12:54 | 27.01583 N, 79.8662 W | RRS James Cook JC191 |
| 2290150 | Water sample data | 2020-01-20 21:12:54 | 27.0145 N, 79.8662 W | RRS James Cook JC191 |
| 2024034 | CTD or STD cast | 2020-01-21 00:17:06 | 27.0138 N, 79.7836 W | RRS James Cook JC191 |
| 2203566 | Currents -subsurface Eulerian | 2020-01-21 00:17:06 | 27.01725 N, 79.78354 W | RRS James Cook JC191 |
| 2290162 | Water sample data | 2020-01-21 00:17:06 | 27.0138 N, 79.7836 W | RRS James Cook JC191 |
| 2024046 | CTD or STD cast | 2020-01-21 03:35:37 | 27.0164 N, 79.6838 W | RRS James Cook JC191 |
| 2203578 | Currents -subsurface Eulerian | 2020-01-21 03:35:37 | 27.01959 N, 79.68375 W | RRS James Cook JC191 |
| 2290174 | Water sample data | 2020-01-21 03:35:37 | 27.0164 N, 79.6838 W | RRS James Cook JC191 |
| 2024058 | CTD or STD cast | 2020-01-21 06:30:48 | 27.0137 N, 79.6168 W | RRS James Cook JC191 |
| 2203591 | Currents -subsurface Eulerian | 2020-01-21 06:30:48 | 27.01509 N, 79.61686 W | RRS James Cook JC191 |
| 2290186 | Water sample data | 2020-01-21 06:30:48 | 27.0137 N, 79.6168 W | RRS James Cook JC191 |
| 2024071 | CTD or STD cast | 2020-01-21 09:42:16 | 27.0084 N, 79.4992 W | RRS James Cook JC191 |
| 2203609 | Currents -subsurface Eulerian | 2020-01-21 09:42:16 | 27.00911 N, 79.49924 W | RRS James Cook JC191 |
| 2290198 | Water sample data | 2020-01-21 09:42:16 | 27.0084 N, 79.4992 W | RRS James Cook JC191 |
| 2024083 | CTD or STD cast | 2020-01-21 12:34:59 | 27.0053 N, 79.3655 W | RRS James Cook JC191 |
| 2203610 | Currents -subsurface Eulerian | 2020-01-21 12:34:59 | 27.00612 N, 79.36547 W | RRS James Cook JC191 |
| 2290205 | Water sample data | 2020-01-21 12:34:59 | 27.0053 N, 79.3655 W | RRS James Cook JC191 |
| 2024095 | CTD or STD cast | 2020-01-21 15:28:50 | 27.0036 N, 79.2843 W | RRS James Cook JC191 |
| 2203622 | Currents -subsurface Eulerian | 2020-01-21 15:28:50 | 27.00495 N, 79.28433 W | RRS James Cook JC191 |
| 2290217 | Water sample data | 2020-01-21 15:28:50 | 27.0036 N, 79.2843 W | RRS James Cook JC191 |
| 2024102 | CTD or STD cast | 2020-01-21 17:57:47 | 27.0016 N, 79.2007 W | RRS James Cook JC191 |
| 2203634 | Currents -subsurface Eulerian | 2020-01-21 17:57:47 | 27.00251 N, 79.20072 W | RRS James Cook JC191 |
| 2290229 | Water sample data | 2020-01-21 17:57:47 | 27.0016 N, 79.2007 W | RRS James Cook JC191 |
| 2024114 | CTD or STD cast | 2020-01-21 20:44:22 | 27.0011 N, 79.1691 W | RRS James Cook JC191 |
| 2203646 | Currents -subsurface Eulerian | 2020-01-21 20:44:22 | 27.00168 N, 79.16967 W | RRS James Cook JC191 |
| 2290230 | Water sample data | 2020-01-21 20:44:22 | 27.0011 N, 79.1691 W | RRS James Cook JC191 |
| 2024126 | CTD or STD cast | 2020-01-22 23:48:14 | 26.5007 N, 76.9314 W | RRS James Cook JC191 |
| 2203658 | Currents -subsurface Eulerian | 2020-01-22 23:48:14 | 26.50071 N, 76.93138 W | RRS James Cook JC191 |
| 2290242 | Water sample data | 2020-01-22 23:48:14 | 26.5007 N, 76.9314 W | RRS James Cook JC191 |
| 2024138 | CTD or STD cast | 2020-01-23 02:53:07 | 26.4996 N, 76.8658 W | RRS James Cook JC191 |
| 2203671 | Currents -subsurface Eulerian | 2020-01-23 02:53:07 | 26.49962 N, 76.8658 W | RRS James Cook JC191 |
| 2290254 | Water sample data | 2020-01-23 02:53:07 | 26.4996 N, 76.8658 W | RRS James Cook JC191 |
| 2024151 | CTD or STD cast | 2020-01-23 05:37:19 | 26.516 N, 76.8254 W | RRS James Cook JC191 |
| 2203683 | Currents -subsurface Eulerian | 2020-01-23 05:37:19 | 26.51601 N, 76.82538 W | RRS James Cook JC191 |
| 2024163 | CTD or STD cast | 2020-01-23 08:48:32 | 26.4981 N, 76.8012 W | RRS James Cook JC191 |
| 2203695 | Currents -subsurface Eulerian | 2020-01-23 08:48:32 | 26.49813 N, 76.80121 W | RRS James Cook JC191 |
| 2290266 | Water sample data | 2020-01-23 08:48:32 | 26.4981 N, 76.8012 W | RRS James Cook JC191 |
| 2024175 | CTD or STD cast | 2020-01-23 12:09:24 | 26.4993 N, 76.7838 W | RRS James Cook JC191 |
| 2203702 | Currents -subsurface Eulerian | 2020-01-23 12:09:24 | 26.4993 N, 76.78379 W | RRS James Cook JC191 |
| 2290278 | Water sample data | 2020-01-23 12:09:24 | 26.4993 N, 76.7838 W | RRS James Cook JC191 |
| 2024187 | CTD or STD cast | 2020-01-23 16:42:37 | 26.4971 N, 76.7617 W | RRS James Cook JC191 |
| 2203714 | Currents -subsurface Eulerian | 2020-01-23 16:42:37 | 26.49599 N, 76.76321 W | RRS James Cook JC191 |
| 2290291 | Water sample data | 2020-01-23 16:42:37 | 26.4971 N, 76.7617 W | RRS James Cook JC191 |
| 2024199 | CTD or STD cast | 2020-01-23 22:13:20 | 26.4963 N, 76.6894 W | RRS James Cook JC191 |
| 2203726 | Currents -subsurface Eulerian | 2020-01-23 22:13:20 | 26.49708 N, 76.68819 W | RRS James Cook JC191 |
| 2290309 | Water sample data | 2020-01-23 22:13:20 | 26.4963 N, 76.6894 W | RRS James Cook JC191 |
| 2024206 | CTD or STD cast | 2020-01-24 02:57:58 | 26.496 N, 76.6896 W | RRS James Cook JC191 |
| 2203738 | Currents -subsurface Eulerian | 2020-01-24 02:57:58 | 26.49612 N, 76.68951 W | RRS James Cook JC191 |
| 2024218 | CTD or STD cast | 2020-01-24 07:20:49 | 26.4981 N, 76.6209 W | RRS James Cook JC191 |
| 2203751 | Currents -subsurface Eulerian | 2020-01-24 07:20:49 | 26.49741 N, 76.62218 W | RRS James Cook JC191 |
| 2290310 | Water sample data | 2020-01-24 07:20:49 | 26.4981 N, 76.6209 W | RRS James Cook JC191 |
| 2024231 | CTD or STD cast | 2020-01-24 12:29:31 | 26.5005 N, 76.5339 W | RRS James Cook JC191 |
| 2203763 | Currents -subsurface Eulerian | 2020-01-24 12:29:31 | 26.4986 N, 76.5394 W | RRS James Cook JC191 |
| 2290322 | Water sample data | 2020-01-24 12:29:31 | 26.5005 N, 76.5339 W | RRS James Cook JC191 |
| 2024243 | CTD or STD cast | 2020-01-24 17:50:33 | 26.4966 N, 76.4409 W | RRS James Cook JC191 |
| 2203775 | Currents -subsurface Eulerian | 2020-01-24 17:50:33 | 26.49845 N, 76.43779 W | RRS James Cook JC191 |
| 2290334 | Water sample data | 2020-01-24 17:50:33 | 26.4966 N, 76.4409 W | RRS James Cook JC191 |
| 2024255 | CTD or STD cast | 2020-01-24 23:31:56 | 26.4993 N, 76.3003 W | RRS James Cook JC191 |
| 2203787 | Currents -subsurface Eulerian | 2020-01-24 23:31:56 | 26.49873 N, 76.30161 W | RRS James Cook JC191 |
| 2290346 | Water sample data | 2020-01-24 23:31:56 | 26.4993 N, 76.3003 W | RRS James Cook JC191 |
| 2024267 | CTD or STD cast | 2020-01-25 04:36:12 | 26.4972 N, 76.2271 W | RRS James Cook JC191 |
| 2203799 | Currents -subsurface Eulerian | 2020-01-25 04:36:12 | 26.49743 N, 76.22669 W | RRS James Cook JC191 |
| 2290358 | Water sample data | 2020-01-25 04:36:12 | 26.4972 N, 76.2271 W | RRS James Cook JC191 |
| 2024279 | CTD or STD cast | 2020-01-25 08:00:50 | 26.5001 N, 76.1506 W | RRS James Cook JC191 |
| 2024280 | CTD or STD cast | 2020-01-25 10:44:28 | 26.4994 N, 76.1015 W | RRS James Cook JC191 |
| 2203806 | Currents -subsurface Eulerian | 2020-01-25 10:44:28 | 26.49833 N, 76.10302 W | RRS James Cook JC191 |
| 2290371 | Water sample data | 2020-01-25 10:44:28 | 26.4994 N, 76.1015 W | RRS James Cook JC191 |
| 2024292 | CTD or STD cast | 2020-01-25 15:48:42 | 26.4899 N, 75.9112 W | RRS James Cook JC191 |
| 2203818 | Currents -subsurface Eulerian | 2020-01-25 15:48:42 | 26.4908 N, 75.91096 W | RRS James Cook JC191 |
| 2290383 | Water sample data | 2020-01-25 15:48:42 | 26.4899 N, 75.9112 W | RRS James Cook JC191 |
| 2024311 | CTD or STD cast | 2020-01-25 21:14:56 | 26.4966 N, 75.7093 W | RRS James Cook JC191 |
| 2203831 | Currents -subsurface Eulerian | 2020-01-25 21:14:56 | 26.49725 N, 75.70822 W | RRS James Cook JC191 |
| 2290395 | Water sample data | 2020-01-25 21:14:56 | 26.4966 N, 75.7093 W | RRS James Cook JC191 |
| 2024323 | CTD or STD cast | 2020-01-26 02:14:20 | 26.4967 N, 75.5065 W | RRS James Cook JC191 |
| 2203843 | Currents -subsurface Eulerian | 2020-01-26 02:14:20 | 26.49652 N, 75.50689 W | RRS James Cook JC191 |
| 2290402 | Water sample data | 2020-01-26 02:14:20 | 26.4967 N, 75.5065 W | RRS James Cook JC191 |
| 2024335 | CTD or STD cast | 2020-01-26 07:09:29 | 26.496 N, 75.3066 W | RRS James Cook JC191 |
| 2203855 | Currents -subsurface Eulerian | 2020-01-26 07:09:29 | 26.49594 N, 75.30668 W | RRS James Cook JC191 |
| 2290414 | Water sample data | 2020-01-26 07:09:29 | 26.496 N, 75.3066 W | RRS James Cook JC191 |
| 2024347 | CTD or STD cast | 2020-01-26 12:18:27 | 26.5 N, 75.0668 W | RRS James Cook JC191 |
| 2203867 | Currents -subsurface Eulerian | 2020-01-26 12:18:27 | 26.50005 N, 75.06681 W | RRS James Cook JC191 |
| 2290426 | Water sample data | 2020-01-26 12:18:27 | 26.5 N, 75.0668 W | RRS James Cook JC191 |
| 2024359 | CTD or STD cast | 2020-01-26 17:33:39 | 26.5007 N, 74.8011 W | RRS James Cook JC191 |
| 2203879 | Currents -subsurface Eulerian | 2020-01-26 17:33:39 | 26.50102 N, 74.80094 W | RRS James Cook JC191 |
| 2290438 | Water sample data | 2020-01-26 17:33:39 | 26.5007 N, 74.8011 W | RRS James Cook JC191 |
| 2024360 | CTD or STD cast | 2020-01-26 22:49:55 | 26.4997 N, 74.5173 W | RRS James Cook JC191 |
| 2203880 | Currents -subsurface Eulerian | 2020-01-26 22:49:55 | 26.49968 N, 74.51728 W | RRS James Cook JC191 |
| 2290451 | Water sample data | 2020-01-26 22:49:55 | 26.4997 N, 74.5173 W | RRS James Cook JC191 |
| 2024372 | CTD or STD cast | 2020-01-27 04:03:49 | 26.4991 N, 74.2357 W | RRS James Cook JC191 |
| 2203892 | Currents -subsurface Eulerian | 2020-01-27 04:03:49 | 26.49897 N, 74.23589 W | RRS James Cook JC191 |
| 2290463 | Water sample data | 2020-01-27 04:03:49 | 26.4991 N, 74.2357 W | RRS James Cook JC191 |
| 2024384 | CTD or STD cast | 2020-01-27 09:24:56 | 26.4999 N, 73.9334 W | RRS James Cook JC191 |
| 2203911 | Currents -subsurface Eulerian | 2020-01-27 09:24:56 | 26.49989 N, 73.93344 W | RRS James Cook JC191 |
| 2290475 | Water sample data | 2020-01-27 09:24:56 | 26.4999 N, 73.9334 W | RRS James Cook JC191 |
| 2024396 | CTD or STD cast | 2020-01-27 15:06:46 | 26.5009 N, 73.5669 W | RRS James Cook JC191 |
| 2203923 | Currents -subsurface Eulerian | 2020-01-27 15:06:46 | 26.50087 N, 73.56689 W | RRS James Cook JC191 |
| 2290487 | Water sample data | 2020-01-27 15:06:46 | 26.5009 N, 73.5669 W | RRS James Cook JC191 |
| 2024403 | CTD or STD cast | 2020-01-27 21:22:32 | 26.4996 N, 73.2007 W | RRS James Cook JC191 |
| 2203935 | Currents -subsurface Eulerian | 2020-01-27 21:22:32 | 26.49956 N, 73.20074 W | RRS James Cook JC191 |
| 2290499 | Water sample data | 2020-01-27 21:22:32 | 26.4996 N, 73.2007 W | RRS James Cook JC191 |
| 2024415 | CTD or STD cast | 2020-01-28 03:39:24 | 26.5008 N, 72.8393 W | RRS James Cook JC191 |
| 2203947 | Currents -subsurface Eulerian | 2020-01-28 03:39:24 | 26.50079 N, 72.83935 W | RRS James Cook JC191 |
| 2290506 | Water sample data | 2020-01-28 03:39:24 | 26.5008 N, 72.8393 W | RRS James Cook JC191 |
| 2024427 | CTD or STD cast | 2020-01-28 10:08:43 | 26.5018 N, 72.4674 W | RRS James Cook JC191 |
| 2203959 | Currents -subsurface Eulerian | 2020-01-28 10:08:43 | 26.50184 N, 72.46735 W | RRS James Cook JC191 |
| 2290518 | Water sample data | 2020-01-28 10:08:43 | 26.5018 N, 72.4674 W | RRS James Cook JC191 |
| 2024439 | CTD or STD cast | 2020-01-28 16:06:25 | 26.5002 N, 72.0995 W | RRS James Cook JC191 |
| 2203960 | Currents -subsurface Eulerian | 2020-01-28 16:06:25 | 26.50037 N, 72.09904 W | RRS James Cook JC191 |
| 2290531 | Water sample data | 2020-01-28 16:06:25 | 26.5002 N, 72.0995 W | RRS James Cook JC191 |
| 2024440 | CTD or STD cast | 2020-01-28 22:17:16 | 26.5002 N, 71.7319 W | RRS James Cook JC191 |
| 2203972 | Currents -subsurface Eulerian | 2020-01-28 22:17:16 | 26.50024 N, 71.73192 W | RRS James Cook JC191 |
| 2290543 | Water sample data | 2020-01-28 22:17:16 | 26.5002 N, 71.7319 W | RRS James Cook JC191 |
| 2024452 | CTD or STD cast | 2020-01-29 05:14:51 | 26.4973 N, 71.3679 W | RRS James Cook JC191 |
| 2203984 | Currents -subsurface Eulerian | 2020-01-29 05:14:51 | 26.49733 N, 71.3679 W | RRS James Cook JC191 |
| 2290555 | Water sample data | 2020-01-29 05:14:51 | 26.4973 N, 71.3679 W | RRS James Cook JC191 |
| 2024464 | CTD or STD cast | 2020-01-29 11:34:36 | 26.4962 N, 70.9985 W | RRS James Cook JC191 |
| 2203996 | Currents -subsurface Eulerian | 2020-01-29 11:34:36 | 26.49573 N, 70.99822 W | RRS James Cook JC191 |
| 2290567 | Water sample data | 2020-01-29 11:34:36 | 26.4962 N, 70.9985 W | RRS James Cook JC191 |
| 2024476 | CTD or STD cast | 2020-01-29 18:55:15 | 26.0998 N, 70.6332 W | RRS James Cook JC191 |
| 2204011 | Currents -subsurface Eulerian | 2020-01-29 18:55:15 | 26.09981 N, 70.6332 W | RRS James Cook JC191 |
| 2290579 | Water sample data | 2020-01-29 18:55:15 | 26.0998 N, 70.6332 W | RRS James Cook JC191 |
| 2024488 | CTD or STD cast | 2020-01-30 02:07:06 | 25.6957 N, 70.2649 W | RRS James Cook JC191 |
| 2204023 | Currents -subsurface Eulerian | 2020-01-30 02:07:06 | 25.69526 N, 70.26464 W | RRS James Cook JC191 |
| 2290580 | Water sample data | 2020-01-30 02:07:06 | 25.6957 N, 70.2649 W | RRS James Cook JC191 |
| 2024507 | CTD or STD cast | 2020-01-30 09:32:18 | 25.2999 N, 69.9 W | RRS James Cook JC191 |
| 2204035 | Currents -subsurface Eulerian | 2020-01-30 09:32:18 | 25.29986 N, 69.9 W | RRS James Cook JC191 |
| 2290592 | Water sample data | 2020-01-30 09:32:18 | 25.2999 N, 69.9 W | RRS James Cook JC191 |
| 2024519 | CTD or STD cast | 2020-01-30 16:59:34 | 24.8997 N, 69.5324 W | RRS James Cook JC191 |
| 2204047 | Currents -subsurface Eulerian | 2020-01-30 16:59:34 | 24.90004 N, 69.53267 W | RRS James Cook JC191 |
| 2290611 | Water sample data | 2020-01-30 16:59:34 | 24.8997 N, 69.5324 W | RRS James Cook JC191 |
| 2024520 | CTD or STD cast | 2020-01-31 00:27:41 | 24.5002 N, 69.1501 W | RRS James Cook JC191 |
| 2204059 | Currents -subsurface Eulerian | 2020-01-31 00:27:41 | 24.50018 N, 69.15015 W | RRS James Cook JC191 |
| 2290623 | Water sample data | 2020-01-31 00:27:41 | 24.5002 N, 69.1501 W | RRS James Cook JC191 |
| 2024532 | CTD or STD cast | 2020-01-31 08:46:46 | 24.5 N, 68.4148 W | RRS James Cook JC191 |
| 2204060 | Currents -subsurface Eulerian | 2020-01-31 08:46:46 | 24.4999 N, 68.41518 W | RRS James Cook JC191 |
| 2290635 | Water sample data | 2020-01-31 08:46:46 | 24.5 N, 68.4148 W | RRS James Cook JC191 |
| 2024544 | CTD or STD cast | 2020-01-31 17:23:47 | 24.5004 N, 67.6679 W | RRS James Cook JC191 |
| 2204072 | Currents -subsurface Eulerian | 2020-01-31 17:23:47 | 24.50036 N, 67.66786 W | RRS James Cook JC191 |
| 2290647 | Water sample data | 2020-01-31 17:23:47 | 24.5004 N, 67.6679 W | RRS James Cook JC191 |
| 2024556 | CTD or STD cast | 2020-02-01 02:09:34 | 24.4977 N, 66.937 W | RRS James Cook JC191 |
| 2204084 | Currents -subsurface Eulerian | 2020-02-01 02:09:34 | 24.49872 N, 66.93594 W | RRS James Cook JC191 |
| 2290659 | Water sample data | 2020-02-01 02:09:34 | 24.4977 N, 66.937 W | RRS James Cook JC191 |
| 2024568 | CTD or STD cast | 2020-02-01 10:51:04 | 24.5001 N, 66.1681 W | RRS James Cook JC191 |
| 2204096 | Currents -subsurface Eulerian | 2020-02-01 10:51:04 | 24.50016 N, 66.16806 W | RRS James Cook JC191 |
| 2290660 | Water sample data | 2020-02-01 10:51:04 | 24.5001 N, 66.1681 W | RRS James Cook JC191 |
| 2024581 | CTD or STD cast | 2020-02-01 18:59:41 | 24.4998 N, 65.4677 W | RRS James Cook JC191 |
| 2204103 | Currents -subsurface Eulerian | 2020-02-01 18:59:41 | 24.4998 N, 65.46772 W | RRS James Cook JC191 |
| 2290672 | Water sample data | 2020-02-01 18:59:41 | 24.4998 N, 65.4677 W | RRS James Cook JC191 |
| 2024593 | CTD or STD cast | 2020-02-02 03:19:19 | 24.4991 N, 64.7344 W | RRS James Cook JC191 |
| 2204115 | Currents -subsurface Eulerian | 2020-02-02 03:19:19 | 24.49905 N, 64.73436 W | RRS James Cook JC191 |
| 2290684 | Water sample data | 2020-02-02 03:19:19 | 24.4991 N, 64.7344 W | RRS James Cook JC191 |
| 2024600 | CTD or STD cast | 2020-02-02 11:42:07 | 24.5006 N, 63.9991 W | RRS James Cook JC191 |
| 2204127 | Currents -subsurface Eulerian | 2020-02-02 11:42:07 | 24.50115 N, 63.99855 W | RRS James Cook JC191 |
| 2290696 | Water sample data | 2020-02-02 11:42:07 | 24.5006 N, 63.9991 W | RRS James Cook JC191 |
| 2024612 | CTD or STD cast | 2020-02-02 20:03:01 | 24.5004 N, 63.2651 W | RRS James Cook JC191 |
| 2204139 | Currents -subsurface Eulerian | 2020-02-02 20:03:01 | 24.50081 N, 63.26458 W | RRS James Cook JC191 |
| 2290703 | Water sample data | 2020-02-02 20:03:01 | 24.5004 N, 63.2651 W | RRS James Cook JC191 |
| 2024624 | CTD or STD cast | 2020-02-03 04:33:43 | 24.4999 N, 62.5313 W | RRS James Cook JC191 |
| 2204140 | Currents -subsurface Eulerian | 2020-02-03 04:33:43 | 24.49999 N, 62.53127 W | RRS James Cook JC191 |
| 2290715 | Water sample data | 2020-02-03 04:33:43 | 24.4999 N, 62.5313 W | RRS James Cook JC191 |
| 2024636 | CTD or STD cast | 2020-02-03 13:06:52 | 24.5 N, 61.8006 W | RRS James Cook JC191 |
| 2204152 | Currents -subsurface Eulerian | 2020-02-03 13:06:52 | 24.49998 N, 61.80063 W | RRS James Cook JC191 |
| 2290727 | Water sample data | 2020-02-03 13:06:52 | 24.5 N, 61.8006 W | RRS James Cook JC191 |
| 2024648 | CTD or STD cast | 2020-02-03 21:34:05 | 24.4999 N, 61.0667 W | RRS James Cook JC191 |
| 2204164 | Currents -subsurface Eulerian | 2020-02-03 21:34:05 | 24.49988 N, 61.06666 W | RRS James Cook JC191 |
| 2290739 | Water sample data | 2020-02-03 21:34:05 | 24.4999 N, 61.0667 W | RRS James Cook JC191 |
| 2024661 | CTD or STD cast | 2020-02-04 06:13:38 | 24.4998 N, 60.3334 W | RRS James Cook JC191 |
| 2204176 | Currents -subsurface Eulerian | 2020-02-04 06:13:38 | 24.49976 N, 60.33342 W | RRS James Cook JC191 |
| 2290740 | Water sample data | 2020-02-04 06:13:38 | 24.4998 N, 60.3334 W | RRS James Cook JC191 |
| 2024673 | CTD or STD cast | 2020-02-04 14:48:01 | 24.5001 N, 59.6015 W | RRS James Cook JC191 |
| 2204188 | Currents -subsurface Eulerian | 2020-02-04 14:48:01 | 24.50012 N, 59.60153 W | RRS James Cook JC191 |
| 2290752 | Water sample data | 2020-02-04 14:48:01 | 24.5001 N, 59.6015 W | RRS James Cook JC191 |
| 2024685 | CTD or STD cast | 2020-02-04 23:30:35 | 24.5007 N, 58.8673 W | RRS James Cook JC191 |
| 2204207 | Currents -subsurface Eulerian | 2020-02-04 23:30:35 | 24.5007 N, 58.86727 W | RRS James Cook JC191 |
| 2290764 | Water sample data | 2020-02-04 23:30:35 | 24.5007 N, 58.8673 W | RRS James Cook JC191 |
| 2024697 | CTD or STD cast | 2020-02-05 08:17:31 | 24.4998 N, 58.1335 W | RRS James Cook JC191 |
| 2204219 | Currents -subsurface Eulerian | 2020-02-05 08:17:31 | 24.49983 N, 58.13348 W | RRS James Cook JC191 |
| 2290776 | Water sample data | 2020-02-05 08:17:31 | 24.4998 N, 58.1335 W | RRS James Cook JC191 |
| 2024704 | CTD or STD cast | 2020-02-05 17:27:37 | 24.4995 N, 57.3957 W | RRS James Cook JC191 |
| 2290788 | Water sample data | 2020-02-05 17:27:37 | 24.4995 N, 57.3957 W | RRS James Cook JC191 |
| 2024716 | CTD or STD cast | 2020-02-06 02:17:43 | 24.4992 N, 56.6679 W | RRS James Cook JC191 |
| 2290807 | Water sample data | 2020-02-06 02:17:43 | 24.4992 N, 56.6679 W | RRS James Cook JC191 |
| 2024728 | CTD or STD cast | 2020-02-06 11:12:04 | 24.5 N, 55.9501 W | RRS James Cook JC191 |
| 2290819 | Water sample data | 2020-02-06 11:12:04 | 24.5 N, 55.9501 W | RRS James Cook JC191 |
| 2024741 | CTD or STD cast | 2020-02-06 19:49:38 | 24.5001 N, 55.2007 W | RRS James Cook JC191 |
| 2290820 | Water sample data | 2020-02-06 19:49:38 | 24.5001 N, 55.2007 W | RRS James Cook JC191 |
| 2024753 | CTD or STD cast | 2020-02-07 04:42:52 | 24.5001 N, 54.473 W | RRS James Cook JC191 |
| 2204220 | Currents -subsurface Eulerian | 2020-02-07 04:42:52 | 24.50012 N, 54.47298 W | RRS James Cook JC191 |
| 2290832 | Water sample data | 2020-02-07 04:42:52 | 24.5001 N, 54.473 W | RRS James Cook JC191 |
| 2024765 | CTD or STD cast | 2020-02-07 13:17:06 | 24.5 N, 53.7335 W | RRS James Cook JC191 |
| 2204232 | Currents -subsurface Eulerian | 2020-02-07 13:17:06 | 24.50004 N, 53.73355 W | RRS James Cook JC191 |
| 2290844 | Water sample data | 2020-02-07 13:17:06 | 24.5 N, 53.7335 W | RRS James Cook JC191 |
| 2024777 | CTD or STD cast | 2020-02-08 05:02:07 | 24.8391 N, 53.1018 W | RRS James Cook JC191 |
| 2204244 | Currents -subsurface Eulerian | 2020-02-08 05:02:07 | 24.83909 N, 53.10176 W | RRS James Cook JC191 |
| 2290856 | Water sample data | 2020-02-08 05:02:07 | 24.8391 N, 53.1018 W | RRS James Cook JC191 |
| 2024789 | CTD or STD cast | 2020-02-08 13:04:53 | 25.1103 N, 52.668 W | RRS James Cook JC191 |
| 2204256 | Currents -subsurface Eulerian | 2020-02-08 13:04:53 | 25.1103 N, 52.66804 W | RRS James Cook JC191 |
| 2290868 | Water sample data | 2020-02-08 13:04:53 | 25.1103 N, 52.668 W | RRS James Cook JC191 |
| 2024790 | CTD or STD cast | 2020-02-08 21:05:27 | 25.1251 N, 52.1676 W | RRS James Cook JC191 |
| 2204268 | Currents -subsurface Eulerian | 2020-02-08 21:05:27 | 25.12514 N, 52.16757 W | RRS James Cook JC191 |
| 2290881 | Water sample data | 2020-02-08 21:05:27 | 25.1251 N, 52.1676 W | RRS James Cook JC191 |
| 2024808 | CTD or STD cast | 2020-02-09 05:18:26 | 25.022 N, 51.667 W | RRS James Cook JC191 |
| 2204281 | Currents -subsurface Eulerian | 2020-02-09 05:18:26 | 25.02195 N, 51.66697 W | RRS James Cook JC191 |
| 2290893 | Water sample data | 2020-02-09 05:18:26 | 25.022 N, 51.667 W | RRS James Cook JC191 |
| 2024821 | CTD or STD cast | 2020-02-09 12:51:25 | 24.9374 N, 51.1672 W | RRS James Cook JC191 |
| 2204293 | Currents -subsurface Eulerian | 2020-02-09 12:51:25 | 24.93734 N, 51.1672 W | RRS James Cook JC191 |
| 2290900 | Water sample data | 2020-02-09 12:51:25 | 24.9374 N, 51.1672 W | RRS James Cook JC191 |
| 2024833 | CTD or STD cast | 2020-02-09 21:04:40 | 24.7985 N, 50.6323 W | RRS James Cook JC191 |
| 2204300 | Currents -subsurface Eulerian | 2020-02-09 21:04:40 | 24.79846 N, 50.63224 W | RRS James Cook JC191 |
| 2290912 | Water sample data | 2020-02-09 21:04:40 | 24.7985 N, 50.6323 W | RRS James Cook JC191 |
| 2024845 | CTD or STD cast | 2020-02-10 04:47:05 | 24.669 N, 50.0904 W | RRS James Cook JC191 |
| 2204312 | Currents -subsurface Eulerian | 2020-02-10 04:47:05 | 24.66904 N, 50.09041 W | RRS James Cook JC191 |
| 2290924 | Water sample data | 2020-02-10 04:47:05 | 24.669 N, 50.0904 W | RRS James Cook JC191 |
| 2024857 | CTD or STD cast | 2020-02-10 12:29:31 | 24.5208 N, 49.5344 W | RRS James Cook JC191 |
| 2204324 | Currents -subsurface Eulerian | 2020-02-10 12:29:31 | 24.52084 N, 49.53437 W | RRS James Cook JC191 |
| 2290936 | Water sample data | 2020-02-10 12:29:31 | 24.5208 N, 49.5344 W | RRS James Cook JC191 |
| 2024869 | CTD or STD cast | 2020-02-10 20:32:43 | 24.3492 N, 49.0089 W | RRS James Cook JC191 |
| 2204336 | Currents -subsurface Eulerian | 2020-02-10 20:32:43 | 24.34913 N, 49.0089 W | RRS James Cook JC191 |
| 2290948 | Water sample data | 2020-02-10 20:32:43 | 24.3492 N, 49.0089 W | RRS James Cook JC191 |
| 2024870 | CTD or STD cast | 2020-02-11 04:09:03 | 24.1968 N, 48.4729 W | RRS James Cook JC191 |
| 2204348 | Currents -subsurface Eulerian | 2020-02-11 04:09:03 | 24.19674 N, 48.47288 W | RRS James Cook JC191 |
| 2290961 | Water sample data | 2020-02-11 04:09:03 | 24.1968 N, 48.4729 W | RRS James Cook JC191 |
| 2024882 | CTD or STD cast | 2020-02-11 11:36:15 | 24.0662 N, 47.9429 W | RRS James Cook JC191 |
| 2204361 | Currents -subsurface Eulerian | 2020-02-11 11:36:15 | 24.06625 N, 47.9429 W | RRS James Cook JC191 |
| 2290973 | Water sample data | 2020-02-11 11:36:15 | 24.0662 N, 47.9429 W | RRS James Cook JC191 |
| 2024894 | CTD or STD cast | 2020-02-11 18:38:29 | 23.9753 N, 47.4089 W | RRS James Cook JC191 |
| 2204373 | Currents -subsurface Eulerian | 2020-02-11 18:38:29 | 23.97524 N, 47.40885 W | RRS James Cook JC191 |
| 2290985 | Water sample data | 2020-02-11 18:38:29 | 23.9753 N, 47.4089 W | RRS James Cook JC191 |
| 2024901 | CTD or STD cast | 2020-02-12 01:39:02 | 23.8994 N, 46.8758 W | RRS James Cook JC191 |
| 2204385 | Currents -subsurface Eulerian | 2020-02-12 01:39:02 | 23.89938 N, 46.87576 W | RRS James Cook JC191 |
| 2290997 | Water sample data | 2020-02-12 01:39:02 | 23.8994 N, 46.8758 W | RRS James Cook JC191 |
| 2024913 | CTD or STD cast | 2020-02-12 08:43:41 | 23.8739 N, 46.3346 W | RRS James Cook JC191 |
| 2204397 | Currents -subsurface Eulerian | 2020-02-12 08:43:41 | 23.87387 N, 46.33456 W | RRS James Cook JC191 |
| 2291000 | Water sample data | 2020-02-12 08:43:41 | 23.8739 N, 46.3346 W | RRS James Cook JC191 |
| 2024925 | CTD or STD cast | 2020-02-12 15:43:00 | 23.7676 N, 45.8023 W | RRS James Cook JC191 |
| 2204404 | Currents -subsurface Eulerian | 2020-02-12 15:43:00 | 23.76762 N, 45.80232 W | RRS James Cook JC191 |
| 2291012 | Water sample data | 2020-02-12 15:43:00 | 23.7676 N, 45.8023 W | RRS James Cook JC191 |
| 2024937 | CTD or STD cast | 2020-02-12 22:28:34 | 23.7324 N, 45.2687 W | RRS James Cook JC191 |
| 2204416 | Currents -subsurface Eulerian | 2020-02-12 22:28:34 | 23.73243 N, 45.26874 W | RRS James Cook JC191 |
| 2291024 | Water sample data | 2020-02-12 22:28:34 | 23.7324 N, 45.2687 W | RRS James Cook JC191 |
| 2024949 | CTD or STD cast | 2020-02-13 05:27:33 | 23.6356 N, 44.7355 W | RRS James Cook JC191 |
| 2204428 | Currents -subsurface Eulerian | 2020-02-13 05:27:33 | 23.6356 N, 44.73546 W | RRS James Cook JC191 |
| 2291036 | Water sample data | 2020-02-13 05:27:33 | 23.6356 N, 44.7355 W | RRS James Cook JC191 |
| 2024950 | CTD or STD cast | 2020-02-13 12:14:25 | 23.535 N, 44.2086 W | RRS James Cook JC191 |
| 2204441 | Currents -subsurface Eulerian | 2020-02-13 12:14:25 | 23.53502 N, 44.2086 W | RRS James Cook JC191 |
| 2291048 | Water sample data | 2020-02-13 12:14:25 | 23.535 N, 44.2086 W | RRS James Cook JC191 |
| 2024962 | CTD or STD cast | 2020-02-13 19:18:33 | 23.45 N, 43.6724 W | RRS James Cook JC191 |
| 2204453 | Currents -subsurface Eulerian | 2020-02-13 19:18:33 | 23.44995 N, 43.67238 W | RRS James Cook JC191 |
| 2291061 | Water sample data | 2020-02-13 19:18:33 | 23.45 N, 43.6724 W | RRS James Cook JC191 |
| 2024974 | CTD or STD cast | 2020-02-14 02:29:04 | 23.3731 N, 43.1416 W | RRS James Cook JC191 |
| 2204465 | Currents -subsurface Eulerian | 2020-02-14 02:29:04 | 23.37314 N, 43.14158 W | RRS James Cook JC191 |
| 2291073 | Water sample data | 2020-02-14 02:29:04 | 23.3731 N, 43.1416 W | RRS James Cook JC191 |
| 2024986 | CTD or STD cast | 2020-02-14 09:43:40 | 23.2504 N, 42.6006 W | RRS James Cook JC191 |
| 2204477 | Currents -subsurface Eulerian | 2020-02-14 09:43:40 | 23.25036 N, 42.60058 W | RRS James Cook JC191 |
| 2291085 | Water sample data | 2020-02-14 09:43:40 | 23.2504 N, 42.6006 W | RRS James Cook JC191 |
| 2024998 | CTD or STD cast | 2020-02-14 17:52:03 | 23.3336 N, 41.8837 W | RRS James Cook JC191 |
| 2204489 | Currents -subsurface Eulerian | 2020-02-14 17:52:03 | 23.33359 N, 41.88368 W | RRS James Cook JC191 |
| 2291097 | Water sample data | 2020-02-14 17:52:03 | 23.3336 N, 41.8837 W | RRS James Cook JC191 |
| 2025001 | CTD or STD cast | 2020-02-14 23:32:42 | 23.4002 N, 41.467 W | RRS James Cook JC191 |
| 2204490 | Currents -subsurface Eulerian | 2020-02-14 23:32:42 | 23.40022 N, 41.46702 W | RRS James Cook JC191 |
| 2025013 | CTD or STD cast | 2020-02-15 04:44:48 | 23.4499 N, 41.0501 W | RRS James Cook JC191 |
| 2204508 | Currents -subsurface Eulerian | 2020-02-15 04:44:48 | 23.44993 N, 41.05008 W | RRS James Cook JC191 |
| 2291104 | Water sample data | 2020-02-15 04:44:48 | 23.4499 N, 41.0501 W | RRS James Cook JC191 |
| 2025025 | CTD or STD cast | 2020-02-15 12:58:41 | 23.5796 N, 40.3333 W | RRS James Cook JC191 |
| 2204521 | Currents -subsurface Eulerian | 2020-02-15 12:58:41 | 23.57964 N, 40.3333 W | RRS James Cook JC191 |
| 2291116 | Water sample data | 2020-02-15 12:58:41 | 23.5796 N, 40.3333 W | RRS James Cook JC191 |
| 2025037 | CTD or STD cast | 2020-02-15 21:19:54 | 23.7096 N, 39.6166 W | RRS James Cook JC191 |
| 2204533 | Currents -subsurface Eulerian | 2020-02-15 21:19:54 | 23.70954 N, 39.6166 W | RRS James Cook JC191 |
| 2291128 | Water sample data | 2020-02-15 21:19:54 | 23.7096 N, 39.6166 W | RRS James Cook JC191 |
| 2025049 | CTD or STD cast | 2020-02-16 05:37:59 | 23.839 N, 38.9001 W | RRS James Cook JC191 |
| 2204545 | Currents -subsurface Eulerian | 2020-02-16 05:37:59 | 23.83905 N, 38.90008 W | RRS James Cook JC191 |
| 2291141 | Water sample data | 2020-02-16 05:37:59 | 23.839 N, 38.9001 W | RRS James Cook JC191 |
| 2025050 | CTD or STD cast | 2020-02-16 14:03:56 | 23.9691 N, 38.1825 W | RRS James Cook JC191 |
| 2204557 | Currents -subsurface Eulerian | 2020-02-16 14:03:56 | 23.96907 N, 38.18249 W | RRS James Cook JC191 |
| 2291153 | Water sample data | 2020-02-16 14:03:56 | 23.9691 N, 38.1825 W | RRS James Cook JC191 |
| 2025062 | CTD or STD cast | 2020-02-16 22:39:30 | 24.1008 N, 37.4739 W | RRS James Cook JC191 |
| 2204569 | Currents -subsurface Eulerian | 2020-02-16 22:39:30 | 24.10099 N, 37.47323 W | RRS James Cook JC191 |
| 2291165 | Water sample data | 2020-02-16 22:39:30 | 24.1008 N, 37.4739 W | RRS James Cook JC191 |
| 2025074 | CTD or STD cast | 2020-02-17 07:15:13 | 24.2284 N, 36.7507 W | RRS James Cook JC191 |
| 2204570 | Currents -subsurface Eulerian | 2020-02-17 07:15:13 | 24.22838 N, 36.75068 W | RRS James Cook JC191 |
| 2291177 | Water sample data | 2020-02-17 07:15:13 | 24.2284 N, 36.7507 W | RRS James Cook JC191 |
| 2025086 | CTD or STD cast | 2020-02-17 15:38:45 | 24.3584 N, 36.0334 W | RRS James Cook JC191 |
| 2204582 | Currents -subsurface Eulerian | 2020-02-17 15:38:45 | 24.3584 N, 36.03344 W | RRS James Cook JC191 |
| 2291189 | Water sample data | 2020-02-17 15:38:45 | 24.3584 N, 36.0334 W | RRS James Cook JC191 |
| 2025098 | CTD or STD cast | 2020-02-18 00:02:12 | 24.4889 N, 35.3154 W | RRS James Cook JC191 |
| 2204594 | Currents -subsurface Eulerian | 2020-02-18 00:02:12 | 24.48888 N, 35.31544 W | RRS James Cook JC191 |
| 2291190 | Water sample data | 2020-02-18 00:02:12 | 24.4889 N, 35.3154 W | RRS James Cook JC191 |
| 2025105 | CTD or STD cast | 2020-02-18 08:10:24 | 24.4999 N, 34.6006 W | RRS James Cook JC191 |
| 2204601 | Currents -subsurface Eulerian | 2020-02-18 08:10:24 | 24.49993 N, 34.60058 W | RRS James Cook JC191 |
| 2291208 | Water sample data | 2020-02-18 08:10:24 | 24.4999 N, 34.6006 W | RRS James Cook JC191 |
| 2025117 | CTD or STD cast | 2020-02-18 16:55:51 | 24.4998 N, 33.9021 W | RRS James Cook JC191 |
| 2204613 | Currents -subsurface Eulerian | 2020-02-18 16:55:51 | 24.49977 N, 33.90207 W | RRS James Cook JC191 |
| 2291221 | Water sample data | 2020-02-18 16:55:51 | 24.4998 N, 33.9021 W | RRS James Cook JC191 |
| 2025129 | CTD or STD cast | 2020-02-19 01:54:28 | 24.5 N, 33.2 W | RRS James Cook JC191 |
| 2204625 | Currents -subsurface Eulerian | 2020-02-19 01:54:28 | 24.5 N, 33.20005 W | RRS James Cook JC191 |
| 2291233 | Water sample data | 2020-02-19 01:54:28 | 24.5 N, 33.2 W | RRS James Cook JC191 |
| 2025130 | CTD or STD cast | 2020-02-19 10:45:51 | 24.4997 N, 32.5002 W | RRS James Cook JC191 |
| 2204637 | Currents -subsurface Eulerian | 2020-02-19 10:45:51 | 24.4997 N, 32.50024 W | RRS James Cook JC191 |
| 2291245 | Water sample data | 2020-02-19 10:45:51 | 24.4997 N, 32.5002 W | RRS James Cook JC191 |
| 2025142 | CTD or STD cast | 2020-02-19 19:36:45 | 24.4999 N, 31.8 W | RRS James Cook JC191 |
| 2204649 | Currents -subsurface Eulerian | 2020-02-19 19:36:45 | 24.49994 N, 31.80004 W | RRS James Cook JC191 |
| 2291257 | Water sample data | 2020-02-19 19:36:45 | 24.4999 N, 31.8 W | RRS James Cook JC191 |
| 2025154 | CTD or STD cast | 2020-02-20 04:28:29 | 24.5 N, 31.1022 W | RRS James Cook JC191 |
| 2204650 | Currents -subsurface Eulerian | 2020-02-20 04:28:29 | 24.5 N, 31.10224 W | RRS James Cook JC191 |
| 2291269 | Water sample data | 2020-02-20 04:28:29 | 24.5 N, 31.1022 W | RRS James Cook JC191 |
| 2025166 | CTD or STD cast | 2020-02-20 13:33:17 | 24.5006 N, 30.3999 W | RRS James Cook JC191 |
| 2204662 | Currents -subsurface Eulerian | 2020-02-20 13:33:17 | 24.50059 N, 30.3999 W | RRS James Cook JC191 |
| 2291270 | Water sample data | 2020-02-20 13:33:17 | 24.5006 N, 30.3999 W | RRS James Cook JC191 |
| 2025178 | CTD or STD cast | 2020-02-20 22:16:29 | 24.5 N, 29.7003 W | RRS James Cook JC191 |
| 2204674 | Currents -subsurface Eulerian | 2020-02-20 22:16:29 | 24.50005 N, 29.70032 W | RRS James Cook JC191 |
| 2291282 | Water sample data | 2020-02-20 22:16:29 | 24.5 N, 29.7003 W | RRS James Cook JC191 |
| 2025191 | CTD or STD cast | 2020-02-21 08:42:59 | 24.499 N, 28.7181 W | RRS James Cook JC191 |
| 2204686 | Currents -subsurface Eulerian | 2020-02-21 08:42:59 | 24.49898 N, 28.71812 W | RRS James Cook JC191 |
| 2291294 | Water sample data | 2020-02-21 08:42:59 | 24.499 N, 28.7181 W | RRS James Cook JC191 |
| 2025209 | CTD or STD cast | 2020-02-21 19:08:53 | 24.4998 N, 27.7333 W | RRS James Cook JC191 |
| 2204698 | Currents -subsurface Eulerian | 2020-02-21 19:08:53 | 24.49983 N, 27.73331 W | RRS James Cook JC191 |
| 2291301 | Water sample data | 2020-02-21 19:08:53 | 24.4998 N, 27.7333 W | RRS James Cook JC191 |
| 2025210 | CTD or STD cast | 2020-02-22 05:43:45 | 24.4996 N, 26.7505 W | RRS James Cook JC191 |
| 2204705 | Currents -subsurface Eulerian | 2020-02-22 05:43:45 | 24.49963 N, 26.75052 W | RRS James Cook JC191 |
| 2291313 | Water sample data | 2020-02-22 05:43:45 | 24.4996 N, 26.7505 W | RRS James Cook JC191 |
| 2025222 | CTD or STD cast | 2020-02-22 15:45:32 | 24.4997 N, 25.7666 W | RRS James Cook JC191 |
| 2204717 | Currents -subsurface Eulerian | 2020-02-22 15:45:32 | 24.49974 N, 25.76663 W | RRS James Cook JC191 |
| 2291325 | Water sample data | 2020-02-22 15:45:32 | 24.4997 N, 25.7666 W | RRS James Cook JC191 |
| 2025234 | CTD or STD cast | 2020-02-23 01:06:40 | 24.4999 N, 24.783 W | RRS James Cook JC191 |
| 2204729 | Currents -subsurface Eulerian | 2020-02-23 01:06:40 | 24.49996 N, 24.78297 W | RRS James Cook JC191 |
| 2291337 | Water sample data | 2020-02-23 01:06:40 | 24.4999 N, 24.783 W | RRS James Cook JC191 |
| 2025246 | CTD or STD cast | 2020-02-23 10:13:18 | 24.4997 N, 23.8 W | RRS James Cook JC191 |
| 2204730 | Currents -subsurface Eulerian | 2020-02-23 10:13:18 | 24.49973 N, 23.80002 W | RRS James Cook JC191 |
| 2291349 | Water sample data | 2020-02-23 10:13:18 | 24.4997 N, 23.8 W | RRS James Cook JC191 |
| 2025258 | CTD or STD cast | 2020-02-23 18:55:44 | 24.7335 N, 22.8159 W | RRS James Cook JC191 |
| 2204742 | Currents -subsurface Eulerian | 2020-02-23 18:55:44 | 24.7332 N, 22.81607 W | RRS James Cook JC191 |
| 2291350 | Water sample data | 2020-02-23 18:55:44 | 24.7335 N, 22.8159 W | RRS James Cook JC191 |
| 2025271 | CTD or STD cast | 2020-02-24 02:33:58 | 24.9813 N, 22.1516 W | RRS James Cook JC191 |
| 2204754 | Currents -subsurface Eulerian | 2020-02-24 02:33:58 | 24.9813 N, 22.15156 W | RRS James Cook JC191 |
| 2291362 | Water sample data | 2020-02-24 02:33:58 | 24.9813 N, 22.1516 W | RRS James Cook JC191 |
| 2025283 | CTD or STD cast | 2020-02-24 10:25:34 | 25.2161 N, 21.4847 W | RRS James Cook JC191 |
| 2204766 | Currents -subsurface Eulerian | 2020-02-24 10:25:34 | 25.21614 N, 21.48467 W | RRS James Cook JC191 |
| 2291374 | Water sample data | 2020-02-24 10:25:34 | 25.2161 N, 21.4847 W | RRS James Cook JC191 |
| 2025295 | CTD or STD cast | 2020-02-24 18:05:13 | 25.4502 N, 20.8001 W | RRS James Cook JC191 |
| 2204778 | Currents -subsurface Eulerian | 2020-02-24 18:05:13 | 25.45015 N, 20.80008 W | RRS James Cook JC191 |
| 2291386 | Water sample data | 2020-02-24 18:05:13 | 25.4502 N, 20.8001 W | RRS James Cook JC191 |
| 2025302 | CTD or STD cast | 2020-02-25 01:09:24 | 25.65 N, 20.2501 W | RRS James Cook JC191 |
| 2204791 | Currents -subsurface Eulerian | 2020-02-25 01:09:24 | 25.65002 N, 20.25008 W | RRS James Cook JC191 |
| 2291398 | Water sample data | 2020-02-25 01:09:24 | 25.65 N, 20.2501 W | RRS James Cook JC191 |
| 2025314 | CTD or STD cast | 2020-02-25 09:00:10 | 25.9166 N, 19.484 W | RRS James Cook JC191 |
| 2204809 | Currents -subsurface Eulerian | 2020-02-25 09:00:10 | 25.91656 N, 19.48406 W | RRS James Cook JC191 |
| 2291405 | Water sample data | 2020-02-25 09:00:10 | 25.9166 N, 19.484 W | RRS James Cook JC191 |
| 2025326 | CTD or STD cast | 2020-02-25 15:29:34 | 26.1334 N, 18.9167 W | RRS James Cook JC191 |
| 2204810 | Currents -subsurface Eulerian | 2020-02-25 15:29:34 | 26.13335 N, 18.9167 W | RRS James Cook JC191 |
| 2291417 | Water sample data | 2020-02-25 15:29:34 | 26.1334 N, 18.9167 W | RRS James Cook JC191 |
| 2025338 | CTD or STD cast | 2020-02-25 23:05:48 | 26.3835 N, 18.166 W | RRS James Cook JC191 |
| 2204822 | Currents -subsurface Eulerian | 2020-02-25 23:05:48 | 26.38352 N, 18.16598 W | RRS James Cook JC191 |
| 2291429 | Water sample data | 2020-02-25 23:05:48 | 26.3835 N, 18.166 W | RRS James Cook JC191 |
| 2025351 | CTD or STD cast | 2020-02-26 06:24:21 | 26.5997 N, 17.4671 W | RRS James Cook JC191 |
| 2204834 | Currents -subsurface Eulerian | 2020-02-26 06:24:21 | 26.59966 N, 17.46712 W | RRS James Cook JC191 |
| 2291430 | Water sample data | 2020-02-26 06:24:21 | 26.5997 N, 17.4671 W | RRS James Cook JC191 |
| 2025363 | CTD or STD cast | 2020-02-26 13:56:45 | 26.8185 N, 16.7849 W | RRS James Cook JC191 |
| 2204846 | Currents -subsurface Eulerian | 2020-02-26 13:56:45 | 26.81795 N, 16.78466 W | RRS James Cook JC191 |
| 2291442 | Water sample data | 2020-02-26 13:56:45 | 26.8185 N, 16.7849 W | RRS James Cook JC191 |
| 2025375 | CTD or STD cast | 2020-02-26 21:12:45 | 27.0495 N, 16.1174 W | RRS James Cook JC191 |
| 2204858 | Currents -subsurface Eulerian | 2020-02-26 21:12:45 | 27.04948 N, 16.1174 W | RRS James Cook JC191 |
| 2291454 | Water sample data | 2020-02-26 21:12:45 | 27.0495 N, 16.1174 W | RRS James Cook JC191 |
| 2025387 | CTD or STD cast | 2020-02-27 03:18:04 | 27.2329 N, 15.6002 W | RRS James Cook JC191 |
| 2204871 | Currents -subsurface Eulerian | 2020-02-27 03:18:04 | 27.23292 N, 15.60019 W | RRS James Cook JC191 |
| 2291466 | Water sample data | 2020-02-27 03:18:04 | 27.2329 N, 15.6002 W | RRS James Cook JC191 |
| 2025399 | CTD or STD cast | 2020-02-27 07:56:34 | 27.333 N, 15.2336 W | RRS James Cook JC191 |
| 2204883 | Currents -subsurface Eulerian | 2020-02-27 07:56:34 | 27.33305 N, 15.23364 W | RRS James Cook JC191 |
| 2025406 | CTD or STD cast | 2020-02-27 12:19:04 | 27.4336 N, 14.867 W | RRS James Cook JC191 |
| 2204895 | Currents -subsurface Eulerian | 2020-02-27 12:19:04 | 27.43362 N, 14.86702 W | RRS James Cook JC191 |
| 2291478 | Water sample data | 2020-02-27 12:19:04 | 27.4336 N, 14.867 W | RRS James Cook JC191 |
| 2025418 | CTD or STD cast | 2020-02-27 17:58:28 | 27.6168 N, 14.2335 W | RRS James Cook JC191 |
| 2204902 | Currents -subsurface Eulerian | 2020-02-27 17:58:28 | 27.61676 N, 14.23346 W | RRS James Cook JC191 |
| 2291491 | Water sample data | 2020-02-27 17:58:28 | 27.6168 N, 14.2335 W | RRS James Cook JC191 |
| 2025431 | CTD or STD cast | 2020-02-27 22:50:49 | 27.7833 N, 13.7667 W | RRS James Cook JC191 |
| 2204914 | Currents -subsurface Eulerian | 2020-02-27 22:50:49 | 27.78331 N, 13.76672 W | RRS James Cook JC191 |
| 2291509 | Water sample data | 2020-02-27 22:50:49 | 27.7833 N, 13.7667 W | RRS James Cook JC191 |
| 2025443 | CTD or STD cast | 2020-02-28 16:21:48 | 28.4309 N, 13.2276 W | RRS James Cook JC191 |
| 2204926 | Currents -subsurface Eulerian | 2020-02-28 16:21:48 | 28.43094 N, 13.22758 W | RRS James Cook JC191 |
| 2291510 | Water sample data | 2020-02-28 16:21:48 | 28.4309 N, 13.2276 W | RRS James Cook JC191 |
