Metadata Report for BODC Series Reference Number 808729
Metadata Summary
Problem Reports
Data Access Policy
Narrative Documents
Project Information
Data Activity or Cruise Information
Fixed Station Information
BODC Quality Flags
SeaDataNet Quality Flags
Metadata Summary
Data Description |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Data Identifiers |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Time Co-ordinates(UT) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Spatial Co-ordinates | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Parameters |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Problem Reports
No Problem Report Found in the Database
Data Access Policy
Open Data
These data have no specific confidentiality restrictions for users. However, users must acknowledge data sources as it is not ethical to publish data without proper attribution. Any publication or other output resulting from usage of the data should include an acknowledgment.
If the Information Provider does not provide a specific attribution statement, or if you are using Information from several Information Providers and multiple attributions are not practical in your product or application, you may consider using the following:
"Contains public sector information licensed under the Open Government Licence v1.0."
Narrative Documents
Kongsberg Simrad EA500 bathymetric echosounder
The EA500 is a bathymetric echosounder that can be used in water as deep as 10,000 m. It features triple frequency operation with a separate digitiser for each channel and high transmitted power with an instantaneous dynamic range of 160 dB. The instrument can operate with several pulses in the water simultaneously and has bottom tracking capabilities. A wide range of transducers (single beam, split beam or side-looking) is available and the ping rate is adjustable up to 10 pings per second. The split beam operation measures the athwartships inclination angle of the seabed.
This instrument was introduced in June 1989 and and replaced by the EA 600 in 2000.
Specifications
| Operational range | 1, 5, 10, 15, 25, 50, 100, 150, 250, 500, 750, 1000, 2500, 5000 and 10000 m |
| Phasing | 0 to 10000 m in 1 m increments (manual or automatic) |
| Non saturated instantaneous input range | -160 to 0 dB |
| Output power regulation | 0 to 20 dB relative to full power |
| Noise figure | 10 dB |
| Operating temperature | 0 to 55°C |
| Ping rate | max 10 pings per second (adjustable) |
Further details can be found in the manufacturer's specification sheet.
Global Positioning Satellite System
A location system of unspecified make or model that determines location on the Earth's surface using the Global Positioning Satellite Network. Angular co-ordinates are given relative to WGS84 CRS. Other parameters such as platform velocity may be derived from this.
RAPID Cruise D279 Underway Navigation and Bathymetry Instrumentation
There are four GPS receivers on RRS Discovery; the Trimble 4000 differential GPS which is a differential GPS, the Glonas GPS which uses a combination of Russian and American satellite networks, the Ashtech GPS and GPS G12.
Two sources of bathymetric data were available on this cruise; a Precision Echosounding (PES) hull mounted fish transducer, and a Simrad EA500 hydrographic echosounder.
RAPID Cruise D279 Underway Meteorology, Surface Hydrography and Navigation Series
Cruise details
| Dates | 4 April 2004 - 10 May 2004 |
|---|---|
| Principal Scientific Officer | Dr Stuart Cunningham (SOC) |
| Cruise Report | Cunningham, S. A., 2005. RRS Discovery Cruise D279 04 APR - 10 MAY 2004. A Transatlantic hydrography section at 24.5°N. Southampton, UK, National Oceanoraphy Centre Southampton.(National Oceanography Centre Southampton Cruise Report No. 54). |
D279 travelled from Freeport in the Bahamas across the Atlantic to Tenerife in Spain. After initially focussing on the collection of chemical data from the Florida Current at 27°N, the main focus of the cruise was the collection of hydrographic data across the Atlantic Ocean between approximately 24 and 27.5°N.
It should be noted that the data series supplied by the originator covers 04 April to 08 May 2004, which is less that the duration of the cruise.
Data Processing Procedures
Two minute averaged sea surface hydrographic and meteorological data, together with navigation and bathymetric files, were transferred from PSTAR format into BODC internal format (QXF), using time (UTC) as the primary linking key, to allow use of the in-house visualisation tool (EDSERPLO). Reformatting and data calibration was carried out, and is discussed in the individual instrument sections. Each data channel was visually inspected and any spikes or periods of dubious data flagged as suspect. The capabilities of the workstation screening software allows comparative screening checks between channels.
The qxf file then underwent a further step. This involved using Matlab to split the qxf file into three separate qxf files. One contained data for hydrography, one for meterological data and the final qxf file held the navigation data.
RAPID Cruise D279 Underway Navigation and Bathymetry Processing
Originator's processing
Data from all four navigation strams along with the ship's gyrocompass readings were logged to the RVS system. A standard PSTAR best navigation file was updated regularly from the bestnav data stream. The preferred input for bestnav is the Trimble 4000 as it has been found to be more accurate on previous cruises. If there were gaps in the Trimble 4000 data, the bestnav process used other inputs as necessary in the order Glonass, Ashtech, G12, gyro.
The PES fish transducer was deployed shortly after leaving Freeport and was used in preference to the hull transducer for the duration of the cruise. The Simrad Echosounder was used continously throughout the cruise for bottom detection.
BODC Processing
Latitude and Longitude
A program was run which locates any gap in the latitude and longitude channels and checks to ensure that the ship's speed does not exceed 15 knots. No excessive ship speeds were found. There are several short gaps in latitude and longitude, which were filled with linear interpolation using the BODC program navint. Distance run was recomputed to create a continuous record.
Ship's velocity
Ship's east-west and north-south velocities were converted from ms-1 to cm-1 at BODC
Bathymetry
Bathymetry data were corrected for variations in speed of sound using Carter's tables during on-board processing.
Project Information
No Project Information held for the Series
Data Activity or Cruise Information
Cruise
| Cruise Name | D279 |
| Departure Date | 2004-04-04 |
| Arrival Date | 2004-05-10 |
| Principal Scientist(s) | Stuart A Cunningham (Southampton Oceanography Centre) |
| Ship | RRS Discovery |
Complete Cruise Metadata Report is available here
Fixed Station Information
Fixed Station Information
| Station Name | 24.5 degrees N Hydrographic Transatlantic section - A05 |
| Category | Offshore route/traverse |
24.5 degrees N Hydrographic Transatlantic section - A05
The hydrographic transatlantic section at 24.5 degrees North has been occupied 8 times, namely in 1957, 1981, 1992, 1998, 2004, 2010, 2015 and 2020. The section is an attempt to calculate the transports of water and its constituents (heat, salinity, nutrients, biological productivity) along this latitude, and to compare the data so that the degree of change in the North Atlantic transports can be revealed. The Hydrographic Programme of the international World Ocean Circulation Experiment (WOCE) designated this section as A05. Since WOCE, the section occupations contribute to the Global Ocean Ship-Based Hydrographic Investigations Program (GO-SHIP).
Map of stations
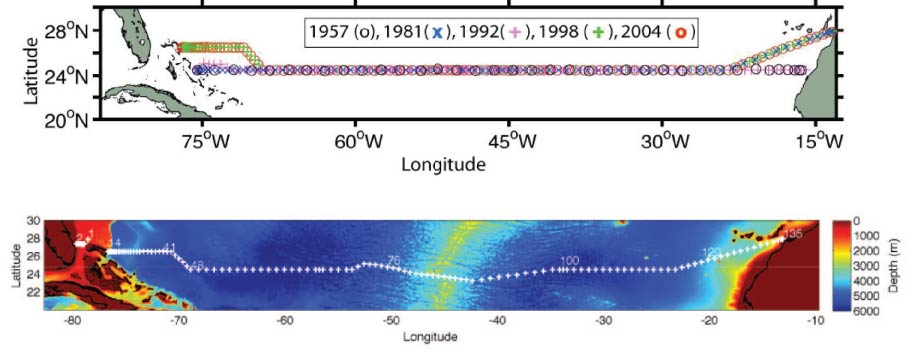
The station positions for most of the occupied sections are shown in the above figures. Sections occupied in 1957, 1981, 1992, 1998 and 2004 are shown in the upper figure. The section occupied in 2010 is shown in the lower figure.
The 1957 and 1992 sections each went zonally along 24.5 degrees N from the African coast to the Bahama Islands. Because of diplomatic clearance issues, the 1981, 1998, 2004, 2010 and 2015 sections angled southwestward from the African coast at about 28 degrees N to join the 24.5 degrees N section at about 23 degrees W. The 1998, 2004 and 2010 sections angled northwestward at about 73 degrees W to finish the section along 26.5 degrees N. The 2010 and 2020 sections deviated from the previous sections across the Mid-Atlantic Ridge (MAR) in order to sample the deepest channel and capture the passage of the deep water across the MAR.
Table 1: Occupations of the section
| Year | Cruise | Reference |
|---|---|---|
| 1957 | - | Fuglister (1960) |
| 1981 | - | Roemmich and Wunsch (1985) |
| 1992 | RV Hesperides HE06 | Parilla et al. (1994) |
| 1998 | RV Ronald H. Brown | Baringer and Molinari (1999) |
| 2004 | RRS Discovery D279 | Bryden et al. (2005b) |
| 2010 | RRS Discovery D346 | King et al. (2012) |
| 2015 | RRS Discovery DY040 | King et al. (2016) |
| 2020 | RRS James Cook JC191 | Sanchez-Franks, A. (2020) |
References
Baringer, M. O. N. and R. L. Molinari, 1999. Atlantic Ocean baroclinic heat flux at 24 to 26°N. Geophysical Research Letters, 26, 353-356.
Bryden, H. L., H. R. Longworth, and S. Cunningham, 2005b. Slowing of the Atlantic meridional overturning circulation at 25°N. Nature, 438, 655-657.
Fuglister, F. C., 1960. Atlantic Ocean Atlas of Temperature and Salinity Profiles and Data from the International Geophysical Year of 1957-1958. Vol. 1, Woods Hole Oceanographic Institution Atlas Series, WHOI, Woods Hole, Massachusetts.
King, B. A. et al., 2012. RRS Discovery Cruise 346, 05 Jan-19 Feb 2010. The 2010 transatlantic hydrography section at 24.5N. Southampton, UK, National Oceanography Centre Southampton, 177pp. (National Oceanography Centre Cruise Report, No. 16).
King, B. A. et al., 2016. RRS Discovery Cruise DY040 (RAGNARoCC), 06 Dec 2015 - 22 Jan 2016. The 2015 transatlantic hydrography section at 24.5N. Southampton, UK, National Oceanography Centre Southampton, 159pp. (National Oceanography Centre Cruise Report).
Parilla, G., A.Lavin, H. Bryden, M. Garcia, and R. Millard, 1994. Rising temperatures in the subtropical North Atlantic Ocean over the past 35 years. Nature, 369, 48-51.
Roemmich, D. and C. Wunsch, 1985. Two transatlantic sections: meridional circulation and heat flux in the subtropical North Atlantic Ocean. Deep Sea Research, 32, 619-664.
Sanchez-Franks, A., 2020. RRS James Cook Cruise JC191, 19 January - 1 March 2020. Hydrographic sections from the Florida Straits to the Canaries Current across 24N in the Atlantic Ocean. Southampton, UK, National Oceanography Centre Southampton, 262pp. (National Oceanography Centre Cruise Report, No. 70).
Related Fixed Station activities are detailed in Appendix 1
BODC Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| Blank | Unqualified |
| < | Below detection limit |
| > | In excess of quoted value |
| A | Taxonomic flag for affinis (aff.) |
| B | Beginning of CTD Down/Up Cast |
| C | Taxonomic flag for confer (cf.) |
| D | Thermometric depth |
| E | End of CTD Down/Up Cast |
| G | Non-taxonomic biological characteristic uncertainty |
| H | Extrapolated value |
| I | Taxonomic flag for single species (sp.) |
| K | Improbable value - unknown quality control source |
| L | Improbable value - originator's quality control |
| M | Improbable value - BODC quality control |
| N | Null value |
| O | Improbable value - user quality control |
| P | Trace/calm |
| Q | Indeterminate |
| R | Replacement value |
| S | Estimated value |
| T | Interpolated value |
| U | Uncalibrated |
| W | Control value |
| X | Excessive difference |
SeaDataNet Quality Control Flags
The following single character qualifying flags may be associated with one or more individual parameters with a data cycle:
| Flag | Description |
|---|---|
| 0 | no quality control |
| 1 | good value |
| 2 | probably good value |
| 3 | probably bad value |
| 4 | bad value |
| 5 | changed value |
| 6 | value below detection |
| 7 | value in excess |
| 8 | interpolated value |
| 9 | missing value |
| A | value phenomenon uncertain |
| B | nominal value |
| Q | value below limit of quantification |
Appendix 1: 24.5 degrees N Hydrographic Transatlantic section - A05
Related series for this Fixed Station are presented in the table below. Further information can be found by following the appropriate links.
If you are interested in these series, please be aware we offer a multiple file download service. Should your credentials be insufficient for automatic download, the service also offers a referral to our Enquiries Officer who may be able to negotiate access.
| Series Identifier | Data Category | Start date/time | Start position | Cruise |
|---|---|---|---|---|
| 670065 | Currents -subsurface Eulerian | 2004-04-04 15:03:48 | 26.52083 N, 78.76967 W | RRS Discovery D279 |
| 669236 | Currents -subsurface Eulerian | 2004-04-04 16:25:05 | 26.49567 N, 78.86267 W | RRS Discovery D279 |
| 808717 | Meteorology -unspecified | 2004-04-04 16:43:00 | 26.4933 N, 78.9181 W | RRS Discovery D279 |
| 808705 | Surface temp/sal | 2004-04-04 16:43:00 | 26.4933 N, 78.9181 W | RRS Discovery D279 |
| 1058174 | CTD or STD cast | 2004-04-04 17:51:00 | 26.48517 N, 79.005 W | RRS Discovery D279 |
| 669248 | Currents -subsurface Eulerian | 2004-04-05 00:00:08 | 27.0 N, 79.385 W | RRS Discovery D279 |
| 670077 | Currents -subsurface Eulerian | 2004-04-05 00:01:51 | 27.0 N, 79.38733 W | RRS Discovery D279 |
| 1058186 | CTD or STD cast | 2004-04-05 06:21:00 | 27.01383 N, 79.93633 W | RRS Discovery D279 |
| 1261135 | Water sample data | 2004-04-05 06:30:30 | 27.01383 N, 79.93636 W | RRS Discovery D279 |
| 1058198 | CTD or STD cast | 2004-04-05 08:25:00 | 27.02917 N, 79.8625 W | RRS Discovery D279 |
| 1261147 | Water sample data | 2004-04-05 08:39:30 | 27.02919 N, 79.86256 W | RRS Discovery D279 |
| 1058205 | CTD or STD cast | 2004-04-05 10:11:00 | 27.0175 N, 79.77617 W | RRS Discovery D279 |
| 1261159 | Water sample data | 2004-04-05 10:29:00 | 27.01755 N, 79.7761 W | RRS Discovery D279 |
| 1058217 | CTD or STD cast | 2004-04-05 12:50:00 | 27.01467 N, 79.6825 W | RRS Discovery D279 |
| 1261160 | Water sample data | 2004-04-05 13:13:00 | 27.01469 N, 79.68244 W | RRS Discovery D279 |
| 1058229 | CTD or STD cast | 2004-04-05 15:45:00 | 27.01533 N, 79.6175 W | RRS Discovery D279 |
| 1261172 | Water sample data | 2004-04-05 16:03:30 | 27.01531 N, 79.61749 W | RRS Discovery D279 |
| 1058230 | CTD or STD cast | 2004-04-05 18:39:00 | 27.0155 N, 79.5035 W | RRS Discovery D279 |
| 1261184 | Water sample data | 2004-04-05 19:04:00 | 27.01549 N, 79.50347 W | RRS Discovery D279 |
| 1058242 | CTD or STD cast | 2004-04-05 21:15:00 | 27.01483 N, 79.388 W | RRS Discovery D279 |
| 1261196 | Water sample data | 2004-04-05 21:34:00 | 27.01489 N, 79.38806 W | RRS Discovery D279 |
| 1058254 | CTD or STD cast | 2004-04-05 23:26:00 | 27.00067 N, 79.28067 W | RRS Discovery D279 |
| 1261203 | Water sample data | 2004-04-05 23:45:00 | 27.00061 N, 79.28068 W | RRS Discovery D279 |
| 669261 | Currents -subsurface Eulerian | 2004-04-06 00:00:08 | 27.00333 N, 79.28133 W | RRS Discovery D279 |
| 670089 | Currents -subsurface Eulerian | 2004-04-06 00:01:57 | 27.00367 N, 79.2815 W | RRS Discovery D279 |
| 1058266 | CTD or STD cast | 2004-04-06 01:40:00 | 26.99867 N, 79.19433 W | RRS Discovery D279 |
| 1261215 | Water sample data | 2004-04-06 01:54:00 | 26.9986 N, 79.19434 W | RRS Discovery D279 |
| 1058278 | CTD or STD cast | 2004-04-06 17:39:00 | 26.507 N, 76.92733 W | RRS Discovery D279 |
| 669273 | Currents -subsurface Eulerian | 2004-04-07 00:00:11 | 25.887 N, 77.46883 W | RRS Discovery D279 |
| 670090 | Currents -subsurface Eulerian | 2004-04-07 08:50:31 | 26.38083 N, 78.58417 W | RRS Discovery D279 |
| 1058291 | CTD or STD cast | 2004-04-07 20:51:00 | 26.508 N, 76.92733 W | RRS Discovery D279 |
| 1261227 | Water sample data | 2004-04-07 20:55:30 | 26.50796 N, 76.92735 W | RRS Discovery D279 |
| 1058309 | CTD or STD cast | 2004-04-07 22:45:00 | 26.52717 N, 76.80633 W | RRS Discovery D279 |
| 1261239 | Water sample data | 2004-04-07 23:38:00 | 26.52716 N, 76.80634 W | RRS Discovery D279 |
| 669285 | Currents -subsurface Eulerian | 2004-04-08 00:00:14 | 26.53633 N, 76.804 W | RRS Discovery D279 |
| 670108 | Currents -subsurface Eulerian | 2004-04-08 00:02:35 | 26.537 N, 76.804 W | RRS Discovery D279 |
| 1058310 | CTD or STD cast | 2004-04-08 02:38:00 | 26.51267 N, 76.78183 W | RRS Discovery D279 |
| 1261240 | Water sample data | 2004-04-08 03:46:30 | 26.51263 N, 76.78186 W | RRS Discovery D279 |
| 1058322 | CTD or STD cast | 2004-04-08 07:02:00 | 26.51533 N, 76.7455 W | RRS Discovery D279 |
| 1261252 | Water sample data | 2004-04-08 08:42:00 | 26.5154 N, 76.74548 W | RRS Discovery D279 |
| 1058334 | CTD or STD cast | 2004-04-08 12:49:00 | 26.5085 N, 76.68817 W | RRS Discovery D279 |
| 1261264 | Water sample data | 2004-04-08 14:52:30 | 26.50856 N, 76.68817 W | RRS Discovery D279 |
| 1058346 | CTD or STD cast | 2004-04-08 19:07:00 | 26.5075 N, 76.6375 W | RRS Discovery D279 |
| 1263640 | Water sample data | 2004-04-08 22:57:30 | 26.50756 N, 76.6375 W | RRS Discovery D279 |
| 669297 | Currents -subsurface Eulerian | 2004-04-09 00:00:18 | 26.49267 N, 76.61167 W | RRS Discovery D279 |
| 670121 | Currents -subsurface Eulerian | 2004-04-09 00:02:39 | 26.4925 N, 76.61133 W | RRS Discovery D279 |
| 1058358 | CTD or STD cast | 2004-04-09 06:33:00 | 26.49917 N, 76.528 W | RRS Discovery D279 |
| 1261276 | Water sample data | 2004-04-09 08:42:00 | 26.49914 N, 76.52803 W | RRS Discovery D279 |
| 1058371 | CTD or STD cast | 2004-04-09 13:30:00 | 26.5005 N, 76.429 W | RRS Discovery D279 |
| 1261288 | Water sample data | 2004-04-09 15:36:30 | 26.50056 N, 76.42902 W | RRS Discovery D279 |
| 1058383 | CTD or STD cast | 2004-04-09 19:44:00 | 26.49233 N, 76.302 W | RRS Discovery D279 |
| 1261307 | Water sample data | 2004-04-09 21:32:30 | 26.49241 N, 76.30192 W | RRS Discovery D279 |
| 669304 | Currents -subsurface Eulerian | 2004-04-10 00:00:17 | 26.48233 N, 76.299 W | RRS Discovery D279 |
| 670133 | Currents -subsurface Eulerian | 2004-04-10 00:01:23 | 26.4825 N, 76.298 W | RRS Discovery D279 |
| 1058395 | CTD or STD cast | 2004-04-10 01:18:00 | 26.487 N, 76.20983 W | RRS Discovery D279 |
| 1261319 | Water sample data | 2004-04-10 03:06:00 | 26.48706 N, 76.20988 W | RRS Discovery D279 |
| 1058402 | CTD or STD cast | 2004-04-10 07:32:00 | 26.49883 N, 76.09567 W | RRS Discovery D279 |
| 1261320 | Water sample data | 2004-04-10 09:05:00 | 26.49878 N, 76.0957 W | RRS Discovery D279 |
| 1058414 | CTD or STD cast | 2004-04-10 12:50:00 | 26.5025 N, 75.91033 W | RRS Discovery D279 |
| 1261332 | Water sample data | 2004-04-10 14:25:00 | 26.50244 N, 75.91032 W | RRS Discovery D279 |
| 1263652 | Water sample data | 2004-04-10 14:25:00 | 26.50244 N, 75.91032 W | RRS Discovery D279 |
| 1058426 | CTD or STD cast | 2004-04-10 17:56:00 | 26.49167 N, 75.70367 W | RRS Discovery D279 |
| 1261344 | Water sample data | 2004-04-10 19:28:00 | 26.49172 N, 75.70361 W | RRS Discovery D279 |
| 1263664 | Water sample data | 2004-04-10 19:28:00 | 26.49172 N, 75.70361 W | RRS Discovery D279 |
| 1058438 | CTD or STD cast | 2004-04-10 23:18:00 | 26.482 N, 75.5145 W | RRS Discovery D279 |
| 669316 | Currents -subsurface Eulerian | 2004-04-11 00:00:20 | 26.48567 N, 75.51267 W | RRS Discovery D279 |
| 670145 | Currents -subsurface Eulerian | 2004-04-11 00:01:30 | 26.4855 N, 75.51267 W | RRS Discovery D279 |
| 1261356 | Water sample data | 2004-04-11 00:53:00 | 26.48208 N, 75.51453 W | RRS Discovery D279 |
| 1058451 | CTD or STD cast | 2004-04-11 04:40:00 | 26.4915 N, 75.3075 W | RRS Discovery D279 |
| 1261368 | Water sample data | 2004-04-11 06:09:00 | 26.49153 N, 75.30758 W | RRS Discovery D279 |
| 1058463 | CTD or STD cast | 2004-04-11 10:01:00 | 26.51533 N, 75.0745 W | RRS Discovery D279 |
| 1261381 | Water sample data | 2004-04-11 11:42:30 | 26.51535 N, 75.07456 W | RRS Discovery D279 |
| 1263676 | Water sample data | 2004-04-11 11:42:30 | 26.51535 N, 75.07456 W | RRS Discovery D279 |
| 1058475 | CTD or STD cast | 2004-04-11 15:36:00 | 26.5105 N, 74.7975 W | RRS Discovery D279 |
| 1058487 | CTD or STD cast | 2004-04-11 17:37:00 | 26.50933 N, 74.789 W | RRS Discovery D279 |
| 1261393 | Water sample data | 2004-04-11 19:07:00 | 26.50938 N, 74.789 W | RRS Discovery D279 |
| 1058499 | CTD or STD cast | 2004-04-11 23:35:00 | 26.52 N, 74.49667 W | RRS Discovery D279 |
| 669328 | Currents -subsurface Eulerian | 2004-04-12 00:00:23 | 26.51167 N, 74.50683 W | RRS Discovery D279 |
| 670157 | Currents -subsurface Eulerian | 2004-04-12 00:01:35 | 26.51183 N, 74.5065 W | RRS Discovery D279 |
| 1261400 | Water sample data | 2004-04-12 01:13:00 | 26.52004 N, 74.49662 W | RRS Discovery D279 |
| 1058506 | CTD or STD cast | 2004-04-12 04:44:00 | 26.5095 N, 74.2365 W | RRS Discovery D279 |
| 1261412 | Water sample data | 2004-04-12 06:25:30 | 26.50953 N, 74.23645 W | RRS Discovery D279 |
| 1058518 | CTD or STD cast | 2004-04-12 09:53:00 | 26.50117 N, 73.93 W | RRS Discovery D279 |
| 1261424 | Water sample data | 2004-04-12 11:42:00 | 26.50118 N, 73.93001 W | RRS Discovery D279 |
| 1263688 | Water sample data | 2004-04-12 11:42:00 | 26.50118 N, 73.93001 W | RRS Discovery D279 |
| 1058531 | CTD or STD cast | 2004-04-12 15:34:00 | 26.51033 N, 73.56367 W | RRS Discovery D279 |
| 1261436 | Water sample data | 2004-04-12 17:24:30 | 26.5104 N, 73.56369 W | RRS Discovery D279 |
| 1058543 | CTD or STD cast | 2004-04-12 21:16:00 | 26.4995 N, 73.19567 W | RRS Discovery D279 |
| 1261448 | Water sample data | 2004-04-12 23:04:00 | 26.49947 N, 73.19566 W | RRS Discovery D279 |
| 669341 | Currents -subsurface Eulerian | 2004-04-13 00:00:23 | 26.49967 N, 73.1775 W | RRS Discovery D279 |
| 670169 | Currents -subsurface Eulerian | 2004-04-13 00:01:38 | 26.49967 N, 73.177 W | RRS Discovery D279 |
| 1058555 | CTD or STD cast | 2004-04-13 03:17:00 | 26.50217 N, 72.847 W | RRS Discovery D279 |
| 1261461 | Water sample data | 2004-04-13 05:08:00 | 26.50223 N, 72.84708 W | RRS Discovery D279 |
| 1058567 | CTD or STD cast | 2004-04-13 10:09:00 | 26.49967 N, 72.486 W | RRS Discovery D279 |
| 1261473 | Water sample data | 2004-04-13 12:03:00 | 26.49968 N, 72.48593 W | RRS Discovery D279 |
| 1263707 | Water sample data | 2004-04-13 12:03:00 | 26.49968 N, 72.48593 W | RRS Discovery D279 |
| 1058579 | CTD or STD cast | 2004-04-13 16:59:00 | 26.48817 N, 72.0065 W | RRS Discovery D279 |
| 1261485 | Water sample data | 2004-04-13 18:48:30 | 26.48818 N, 72.00642 W | RRS Discovery D279 |
| 1058580 | CTD or STD cast | 2004-04-13 22:59:00 | 26.483 N, 71.75167 W | RRS Discovery D279 |
| 669353 | Currents -subsurface Eulerian | 2004-04-14 00:00:26 | 26.48417 N, 71.74883 W | RRS Discovery D279 |
| 670170 | Currents -subsurface Eulerian | 2004-04-14 00:01:42 | 26.484 N, 71.74883 W | RRS Discovery D279 |
| 1261497 | Water sample data | 2004-04-14 00:51:00 | 26.48295 N, 71.75166 W | RRS Discovery D279 |
| 1058592 | CTD or STD cast | 2004-04-14 05:43:00 | 26.50817 N, 71.34333 W | RRS Discovery D279 |
| 1058611 | CTD or STD cast | 2004-04-14 11:50:00 | 26.49 N, 70.98683 W | RRS Discovery D279 |
| 1261504 | Water sample data | 2004-04-14 13:45:00 | 26.48999 N, 70.98682 W | RRS Discovery D279 |
| 1263719 | Water sample data | 2004-04-14 13:45:00 | 26.48999 N, 70.98682 W | RRS Discovery D279 |
| 1058623 | CTD or STD cast | 2004-04-14 18:37:00 | 26.13383 N, 70.60133 W | RRS Discovery D279 |
| 1261516 | Water sample data | 2004-04-14 20:27:00 | 26.1338 N, 70.60127 W | RRS Discovery D279 |
| 669365 | Currents -subsurface Eulerian | 2004-04-15 00:00:29 | 25.89667 N, 70.37383 W | RRS Discovery D279 |
| 670182 | Currents -subsurface Eulerian | 2004-04-15 00:01:46 | 25.89333 N, 70.371 W | RRS Discovery D279 |
| 1058635 | CTD or STD cast | 2004-04-15 01:16:00 | 25.76517 N, 70.23817 W | RRS Discovery D279 |
| 1261528 | Water sample data | 2004-04-15 03:02:00 | 25.7652 N, 70.23813 W | RRS Discovery D279 |
| 1058647 | CTD or STD cast | 2004-04-15 08:00:00 | 25.38033 N, 69.87733 W | RRS Discovery D279 |
| 1261541 | Water sample data | 2004-04-15 10:01:30 | 25.38039 N, 69.87737 W | RRS Discovery D279 |
| 1058659 | CTD or STD cast | 2004-04-15 15:03:00 | 25.00083 N, 69.50617 W | RRS Discovery D279 |
| 1261553 | Water sample data | 2004-04-15 17:03:00 | 25.00084 N, 69.50616 W | RRS Discovery D279 |
| 1263720 | Water sample data | 2004-04-15 17:03:00 | 25.00084 N, 69.50616 W | RRS Discovery D279 |
| 1058660 | CTD or STD cast | 2004-04-15 22:49:00 | 24.49417 N, 69.14683 W | RRS Discovery D279 |
| 669377 | Currents -subsurface Eulerian | 2004-04-16 00:00:30 | 24.49467 N, 69.144 W | RRS Discovery D279 |
| 670194 | Currents -subsurface Eulerian | 2004-04-16 00:01:50 | 24.49467 N, 69.14417 W | RRS Discovery D279 |
| 1261565 | Water sample data | 2004-04-16 00:38:30 | 24.49411 N, 69.14676 W | RRS Discovery D279 |
| 1058672 | CTD or STD cast | 2004-04-16 06:51:00 | 24.50883 N, 68.4135 W | RRS Discovery D279 |
| 1261577 | Water sample data | 2004-04-16 08:48:00 | 24.50879 N, 68.41349 W | RRS Discovery D279 |
| 1058684 | CTD or STD cast | 2004-04-16 14:59:00 | 24.51067 N, 67.67067 W | RRS Discovery D279 |
| 1261589 | Water sample data | 2004-04-16 16:45:30 | 24.51074 N, 67.67065 W | RRS Discovery D279 |
| 1058696 | CTD or STD cast | 2004-04-16 22:38:00 | 24.48733 N, 66.92317 W | RRS Discovery D279 |
| 669389 | Currents -subsurface Eulerian | 2004-04-17 00:00:33 | 24.48767 N, 66.924 W | RRS Discovery D279 |
| 670201 | Currents -subsurface Eulerian | 2004-04-17 00:01:56 | 24.48767 N, 66.92383 W | RRS Discovery D279 |
| 1261590 | Water sample data | 2004-04-17 00:27:00 | 24.4873 N, 66.92314 W | RRS Discovery D279 |
| 1058703 | CTD or STD cast | 2004-04-17 06:16:00 | 24.50283 N, 66.19233 W | RRS Discovery D279 |
| 1261608 | Water sample data | 2004-04-17 08:01:30 | 24.5029 N, 66.19226 W | RRS Discovery D279 |
| 1058715 | CTD or STD cast | 2004-04-17 13:46:00 | 24.49567 N, 65.4635 W | RRS Discovery D279 |
| 1261621 | Water sample data | 2004-04-17 15:33:30 | 24.49573 N, 65.46346 W | RRS Discovery D279 |
| 1263732 | Water sample data | 2004-04-17 15:33:30 | 24.49573 N, 65.46346 W | RRS Discovery D279 |
| 1058727 | CTD or STD cast | 2004-04-17 21:36:00 | 24.50917 N, 64.65933 W | RRS Discovery D279 |
| 1261633 | Water sample data | 2004-04-17 23:29:00 | 24.50919 N, 64.65941 W | RRS Discovery D279 |
| 669390 | Currents -subsurface Eulerian | 2004-04-18 00:00:37 | 24.51317 N, 64.6635 W | RRS Discovery D279 |
| 670213 | Currents -subsurface Eulerian | 2004-04-18 00:02:00 | 24.51317 N, 64.66367 W | RRS Discovery D279 |
| 1058739 | CTD or STD cast | 2004-04-18 05:20:00 | 24.49783 N, 64.00117 W | RRS Discovery D279 |
| 1261645 | Water sample data | 2004-04-18 07:09:00 | 24.49787 N, 64.00118 W | RRS Discovery D279 |
| 1058740 | CTD or STD cast | 2004-04-18 13:33:00 | 24.505 N, 63.268 W | RRS Discovery D279 |
| 1261657 | Water sample data | 2004-04-18 15:19:30 | 24.50496 N, 63.26804 W | RRS Discovery D279 |
| 1058752 | CTD or STD cast | 2004-04-18 21:28:00 | 24.504 N, 62.528 W | RRS Discovery D279 |
| 1261669 | Water sample data | 2004-04-18 23:19:30 | 24.50405 N, 62.52804 W | RRS Discovery D279 |
| 669408 | Currents -subsurface Eulerian | 2004-04-19 00:00:37 | 24.502 N, 62.53 W | RRS Discovery D279 |
| 670225 | Currents -subsurface Eulerian | 2004-04-19 00:02:05 | 24.502 N, 62.53 W | RRS Discovery D279 |
| 1058764 | CTD or STD cast | 2004-04-19 05:19:00 | 24.5075 N, 61.7985 W | RRS Discovery D279 |
| 1261670 | Water sample data | 2004-04-19 07:12:00 | 24.50751 N, 61.79844 W | RRS Discovery D279 |
| 1058776 | CTD or STD cast | 2004-04-19 13:06:00 | 24.50117 N, 61.063 W | RRS Discovery D279 |
| 1261682 | Water sample data | 2004-04-19 15:02:30 | 24.5012 N, 61.06298 W | RRS Discovery D279 |
| 1263744 | Water sample data | 2004-04-19 15:02:30 | 24.5012 N, 61.06298 W | RRS Discovery D279 |
| 1058788 | CTD or STD cast | 2004-04-19 21:00:00 | 24.512 N, 60.32317 W | RRS Discovery D279 |
| 1261694 | Water sample data | 2004-04-19 22:59:30 | 24.51196 N, 60.32312 W | RRS Discovery D279 |
| 669421 | Currents -subsurface Eulerian | 2004-04-20 00:00:40 | 24.522 N, 60.31867 W | RRS Discovery D279 |
| 670237 | Currents -subsurface Eulerian | 2004-04-20 00:02:09 | 24.52217 N, 60.3185 W | RRS Discovery D279 |
| 1058807 | CTD or STD cast | 2004-04-20 05:10:00 | 24.51533 N, 59.59183 W | RRS Discovery D279 |
| 1261701 | Water sample data | 2004-04-20 07:11:00 | 24.51532 N, 59.59186 W | RRS Discovery D279 |
| 1058819 | CTD or STD cast | 2004-04-20 13:18:00 | 24.49817 N, 58.85783 W | RRS Discovery D279 |
| 1261713 | Water sample data | 2004-04-20 15:19:30 | 24.49814 N, 58.85783 W | RRS Discovery D279 |
| 1058820 | CTD or STD cast | 2004-04-20 20:51:00 | 24.4995 N, 58.1325 W | RRS Discovery D279 |
| 1261725 | Water sample data | 2004-04-20 22:44:30 | 24.49944 N, 58.13257 W | RRS Discovery D279 |
| 669433 | Currents -subsurface Eulerian | 2004-04-21 00:00:40 | 24.497 N, 58.13167 W | RRS Discovery D279 |
| 670249 | Currents -subsurface Eulerian | 2004-04-21 00:02:15 | 24.49683 N, 58.13167 W | RRS Discovery D279 |
| 1058832 | CTD or STD cast | 2004-04-21 04:40:00 | 24.50217 N, 57.38867 W | RRS Discovery D279 |
| 1261737 | Water sample data | 2004-04-21 06:33:30 | 24.50212 N, 57.38867 W | RRS Discovery D279 |
| 1058844 | CTD or STD cast | 2004-04-21 12:35:00 | 24.49517 N, 56.66717 W | RRS Discovery D279 |
| 1261749 | Water sample data | 2004-04-21 14:28:00 | 24.49509 N, 56.66721 W | RRS Discovery D279 |
| 1263756 | Water sample data | 2004-04-21 14:28:00 | 24.49509 N, 56.66721 W | RRS Discovery D279 |
| 1058856 | CTD or STD cast | 2004-04-21 20:18:00 | 24.51683 N, 55.93533 W | RRS Discovery D279 |
| 1261750 | Water sample data | 2004-04-21 22:15:00 | 24.51691 N, 55.93536 W | RRS Discovery D279 |
| 669445 | Currents -subsurface Eulerian | 2004-04-22 00:00:44 | 24.53217 N, 55.943 W | RRS Discovery D279 |
| 670250 | Currents -subsurface Eulerian | 2004-04-22 00:02:19 | 24.5325 N, 55.94317 W | RRS Discovery D279 |
| 1058868 | CTD or STD cast | 2004-04-22 04:24:00 | 24.5045 N, 55.2125 W | RRS Discovery D279 |
| 1261762 | Water sample data | 2004-04-22 06:12:00 | 24.50449 N, 55.21244 W | RRS Discovery D279 |
| 1058881 | CTD or STD cast | 2004-04-22 12:13:00 | 24.49967 N, 54.47367 W | RRS Discovery D279 |
| 1261774 | Water sample data | 2004-04-22 13:59:30 | 24.49975 N, 54.47366 W | RRS Discovery D279 |
| 1263768 | Water sample data | 2004-04-22 13:59:30 | 24.49975 N, 54.47366 W | RRS Discovery D279 |
| 1058893 | CTD or STD cast | 2004-04-22 19:54:00 | 24.49433 N, 53.73617 W | RRS Discovery D279 |
| 1261786 | Water sample data | 2004-04-22 21:44:30 | 24.49426 N, 53.73616 W | RRS Discovery D279 |
| 669457 | Currents -subsurface Eulerian | 2004-04-23 00:00:45 | 24.49033 N, 53.71083 W | RRS Discovery D279 |
| 670262 | Currents -subsurface Eulerian | 2004-04-23 00:02:21 | 24.49083 N, 53.70517 W | RRS Discovery D279 |
| 1058900 | CTD or STD cast | 2004-04-23 02:54:00 | 24.49767 N, 53.17817 W | RRS Discovery D279 |
| 1261798 | Water sample data | 2004-04-23 04:51:30 | 24.49765 N, 53.17809 W | RRS Discovery D279 |
| 1058912 | CTD or STD cast | 2004-04-23 09:52:00 | 24.5045 N, 52.63733 W | RRS Discovery D279 |
| 1261805 | Water sample data | 2004-04-23 11:34:30 | 24.50445 N, 52.63738 W | RRS Discovery D279 |
| 1058924 | CTD or STD cast | 2004-04-23 16:06:00 | 24.49933 N, 52.1615 W | RRS Discovery D279 |
| 1261817 | Water sample data | 2004-04-23 17:41:30 | 24.49938 N, 52.16146 W | RRS Discovery D279 |
| 1263781 | Water sample data | 2004-04-23 17:41:30 | 24.49938 N, 52.16146 W | RRS Discovery D279 |
| 1058936 | CTD or STD cast | 2004-04-23 23:07:00 | 24.49967 N, 51.538 W | RRS Discovery D279 |
| 669469 | Currents -subsurface Eulerian | 2004-04-24 00:00:47 | 24.49883 N, 51.53633 W | RRS Discovery D279 |
| 670274 | Currents -subsurface Eulerian | 2004-04-24 00:02:26 | 24.499 N, 51.53633 W | RRS Discovery D279 |
| 1261829 | Water sample data | 2004-04-24 00:51:30 | 24.49971 N, 51.53798 W | RRS Discovery D279 |
| 1058948 | CTD or STD cast | 2004-04-24 05:59:00 | 24.50767 N, 50.997 W | RRS Discovery D279 |
| 1058961 | CTD or STD cast | 2004-04-24 13:03:00 | 24.4995 N, 50.44167 W | RRS Discovery D279 |
| 1261830 | Water sample data | 2004-04-24 14:37:30 | 24.49953 N, 50.44174 W | RRS Discovery D279 |
| 1263793 | Water sample data | 2004-04-24 14:37:30 | 24.49953 N, 50.44174 W | RRS Discovery D279 |
| 1058973 | CTD or STD cast | 2004-04-24 19:22:00 | 24.51017 N, 49.87517 W | RRS Discovery D279 |
| 1261842 | Water sample data | 2004-04-24 20:56:00 | 24.51019 N, 49.87516 W | RRS Discovery D279 |
| 669470 | Currents -subsurface Eulerian | 2004-04-25 00:00:47 | 24.50883 N, 49.63033 W | RRS Discovery D279 |
| 670286 | Currents -subsurface Eulerian | 2004-04-25 00:02:30 | 24.5085 N, 49.6245 W | RRS Discovery D279 |
| 1058985 | CTD or STD cast | 2004-04-25 01:47:00 | 24.50733 N, 49.334 W | RRS Discovery D279 |
| 1261854 | Water sample data | 2004-04-25 03:38:30 | 24.50729 N, 49.33404 W | RRS Discovery D279 |
| 1058997 | CTD or STD cast | 2004-04-25 08:42:00 | 24.49733 N, 48.77483 W | RRS Discovery D279 |
| 1261866 | Water sample data | 2004-04-25 10:15:30 | 24.49732 N, 48.7748 W | RRS Discovery D279 |
| 1059000 | CTD or STD cast | 2004-04-25 16:05:00 | 24.5055 N, 47.96267 W | RRS Discovery D279 |
| 1261878 | Water sample data | 2004-04-25 17:24:30 | 24.50545 N, 47.96263 W | RRS Discovery D279 |
| 1263800 | Water sample data | 2004-04-25 17:24:30 | 24.50545 N, 47.96263 W | RRS Discovery D279 |
| 1059012 | CTD or STD cast | 2004-04-25 23:23:00 | 24.49883 N, 47.12483 W | RRS Discovery D279 |
| 669482 | Currents -subsurface Eulerian | 2004-04-26 00:00:49 | 24.498 N, 47.12617 W | RRS Discovery D279 |
| 670298 | Currents -subsurface Eulerian | 2004-04-26 00:02:13 | 24.498 N, 47.12617 W | RRS Discovery D279 |
| 1261891 | Water sample data | 2004-04-26 00:40:00 | 24.49882 N, 47.1249 W | RRS Discovery D279 |
| 1059024 | CTD or STD cast | 2004-04-26 05:05:00 | 24.49583 N, 46.57467 W | RRS Discovery D279 |
| 1261909 | Water sample data | 2004-04-26 06:19:30 | 24.49575 N, 46.57467 W | RRS Discovery D279 |
| 1059036 | CTD or STD cast | 2004-04-26 10:29:00 | 24.4955 N, 46.0355 W | RRS Discovery D279 |
| 1261910 | Water sample data | 2004-04-26 11:31:30 | 24.49544 N, 46.03556 W | RRS Discovery D279 |
| 1059048 | CTD or STD cast | 2004-04-26 15:41:00 | 24.50483 N, 45.49033 W | RRS Discovery D279 |
| 1261922 | Water sample data | 2004-04-26 16:55:30 | 24.50475 N, 45.49031 W | RRS Discovery D279 |
| 1263812 | Water sample data | 2004-04-26 16:55:30 | 24.50475 N, 45.49031 W | RRS Discovery D279 |
| 1059061 | CTD or STD cast | 2004-04-26 21:27:00 | 24.48583 N, 44.94583 W | RRS Discovery D279 |
| 1261934 | Water sample data | 2004-04-26 22:40:30 | 24.48584 N, 44.94587 W | RRS Discovery D279 |
| 669494 | Currents -subsurface Eulerian | 2004-04-27 00:00:51 | 24.46567 N, 44.961 W | RRS Discovery D279 |
| 670305 | Currents -subsurface Eulerian | 2004-04-27 00:02:18 | 24.4655 N, 44.96133 W | RRS Discovery D279 |
| 1059073 | CTD or STD cast | 2004-04-27 03:29:00 | 24.502 N, 44.3955 W | RRS Discovery D279 |
| 1261946 | Water sample data | 2004-04-27 04:47:00 | 24.50196 N, 44.39555 W | RRS Discovery D279 |
| 1059085 | CTD or STD cast | 2004-04-27 09:26:00 | 24.50033 N, 43.84383 W | RRS Discovery D279 |
| 1261958 | Water sample data | 2004-04-27 10:43:30 | 24.50028 N, 43.84384 W | RRS Discovery D279 |
| 1059097 | CTD or STD cast | 2004-04-27 16:18:00 | 24.5095 N, 43.00717 W | RRS Discovery D279 |
| 1261971 | Water sample data | 2004-04-27 17:48:00 | 24.50957 N, 43.00718 W | RRS Discovery D279 |
| 1263824 | Water sample data | 2004-04-27 17:48:00 | 24.50957 N, 43.00718 W | RRS Discovery D279 |
| 1059104 | CTD or STD cast | 2004-04-27 23:41:00 | 24.499 N, 42.18417 W | RRS Discovery D279 |
| 669501 | Currents -subsurface Eulerian | 2004-04-28 00:00:54 | 24.49883 N, 42.17967 W | RRS Discovery D279 |
| 670317 | Currents -subsurface Eulerian | 2004-04-28 00:02:23 | 24.499 N, 42.17967 W | RRS Discovery D279 |
| 1261983 | Water sample data | 2004-04-28 01:14:00 | 24.49908 N, 42.18412 W | RRS Discovery D279 |
| 1059116 | CTD or STD cast | 2004-04-28 06:08:00 | 24.50867 N, 41.63983 W | RRS Discovery D279 |
| 1261995 | Water sample data | 2004-04-28 07:35:30 | 24.50871 N, 41.63991 W | RRS Discovery D279 |
| 1263836 | Water sample data | 2004-04-28 07:35:30 | 24.50871 N, 41.63991 W | RRS Discovery D279 |
| 1059128 | CTD or STD cast | 2004-04-28 12:30:00 | 24.50317 N, 41.09183 W | RRS Discovery D279 |
| 1262009 | Water sample data | 2004-04-28 14:05:00 | 24.50313 N, 41.0919 W | RRS Discovery D279 |
| 1059141 | CTD or STD cast | 2004-04-28 20:10:00 | 24.51183 N, 40.2815 W | RRS Discovery D279 |
| 1262010 | Water sample data | 2004-04-28 21:41:30 | 24.51178 N, 40.28147 W | RRS Discovery D279 |
| 669513 | Currents -subsurface Eulerian | 2004-04-29 00:00:56 | 24.50817 N, 40.17767 W | RRS Discovery D279 |
| 670329 | Currents -subsurface Eulerian | 2004-04-29 00:02:26 | 24.50783 N, 40.17283 W | RRS Discovery D279 |
| 1059153 | CTD or STD cast | 2004-04-29 05:12:00 | 24.49767 N, 39.245 W | RRS Discovery D279 |
| 1262022 | Water sample data | 2004-04-29 06:52:30 | 24.49775 N, 39.24506 W | RRS Discovery D279 |
| 1059165 | CTD or STD cast | 2004-04-29 12:35:00 | 24.499 N, 38.5235 W | RRS Discovery D279 |
| 1262034 | Water sample data | 2004-04-29 13:53:30 | 24.49894 N, 38.52354 W | RRS Discovery D279 |
| 1263848 | Water sample data | 2004-04-29 13:53:30 | 24.49894 N, 38.52354 W | RRS Discovery D279 |
| 1059177 | CTD or STD cast | 2004-04-29 19:58:00 | 24.499 N, 37.69517 W | RRS Discovery D279 |
| 1262046 | Water sample data | 2004-04-29 21:40:00 | 24.49908 N, 37.69516 W | RRS Discovery D279 |
| 669525 | Currents -subsurface Eulerian | 2004-04-30 00:00:57 | 24.49667 N, 37.63267 W | RRS Discovery D279 |
| 670330 | Currents -subsurface Eulerian | 2004-04-30 00:02:31 | 24.497 N, 37.62767 W | RRS Discovery D279 |
| 1059189 | CTD or STD cast | 2004-04-30 04:00:00 | 24.4895 N, 36.88 W | RRS Discovery D279 |
| 1262058 | Water sample data | 2004-04-30 05:32:30 | 24.48948 N, 36.87996 W | RRS Discovery D279 |
| 1059190 | CTD or STD cast | 2004-04-30 11:34:00 | 24.49267 N, 36.04583 W | RRS Discovery D279 |
| 1262071 | Water sample data | 2004-04-30 13:16:30 | 24.49267 N, 36.04583 W | RRS Discovery D279 |
| 1059208 | CTD or STD cast | 2004-04-30 19:27:00 | 24.5045 N, 35.22867 W | RRS Discovery D279 |
| 1262083 | Water sample data | 2004-04-30 21:01:00 | 24.50443 N, 35.22859 W | RRS Discovery D279 |
| 1263861 | Water sample data | 2004-04-30 21:01:00 | 24.50443 N, 35.22859 W | RRS Discovery D279 |
| 669537 | Currents -subsurface Eulerian | 2004-05-01 00:01:01 | 24.50583 N, 34.99483 W | RRS Discovery D279 |
| 670342 | Currents -subsurface Eulerian | 2004-05-01 00:02:37 | 24.5055 N, 34.98917 W | RRS Discovery D279 |
| 1059221 | CTD or STD cast | 2004-05-01 03:08:00 | 24.49567 N, 34.38933 W | RRS Discovery D279 |
| 1262095 | Water sample data | 2004-05-01 04:39:00 | 24.49572 N, 34.38929 W | RRS Discovery D279 |
| 1059233 | CTD or STD cast | 2004-05-01 10:19:00 | 24.49917 N, 33.57333 W | RRS Discovery D279 |
| 1262102 | Water sample data | 2004-05-01 12:02:30 | 24.49909 N, 33.57325 W | RRS Discovery D279 |
| 1263873 | Water sample data | 2004-05-01 12:02:30 | 24.49909 N, 33.57325 W | RRS Discovery D279 |
| 1059245 | CTD or STD cast | 2004-05-01 18:36:00 | 24.50967 N, 32.65717 W | RRS Discovery D279 |
| 1262114 | Water sample data | 2004-05-01 20:20:00 | 24.50971 N, 32.6571 W | RRS Discovery D279 |
| 669549 | Currents -subsurface Eulerian | 2004-05-02 00:01:01 | 24.50667 N, 32.324 W | RRS Discovery D279 |
| 670354 | Currents -subsurface Eulerian | 2004-05-02 00:02:39 | 24.50667 N, 32.3185 W | RRS Discovery D279 |
| 1059257 | CTD or STD cast | 2004-05-02 03:05:00 | 24.4995 N, 31.73083 W | RRS Discovery D279 |
| 1262126 | Water sample data | 2004-05-02 04:51:30 | 24.49957 N, 31.73084 W | RRS Discovery D279 |
| 1059269 | CTD or STD cast | 2004-05-02 11:21:00 | 24.49517 N, 30.81267 W | RRS Discovery D279 |
| 1262138 | Water sample data | 2004-05-02 12:57:30 | 24.49512 N, 30.8127 W | RRS Discovery D279 |
| 1059270 | CTD or STD cast | 2004-05-02 19:32:00 | 24.5015 N, 29.89 W | RRS Discovery D279 |
| 1262151 | Water sample data | 2004-05-02 21:17:30 | 24.50153 N, 29.89004 W | RRS Discovery D279 |
| 1263885 | Water sample data | 2004-05-02 21:17:30 | 24.50153 N, 29.89004 W | RRS Discovery D279 |
| 669550 | Currents -subsurface Eulerian | 2004-05-03 00:01:02 | 24.502 N, 29.71967 W | RRS Discovery D279 |
| 670366 | Currents -subsurface Eulerian | 2004-05-03 00:01:05 | 24.502 N, 29.7195 W | RRS Discovery D279 |
| 1059282 | CTD or STD cast | 2004-05-03 03:53:00 | 24.50283 N, 28.98767 W | RRS Discovery D279 |
| 1262163 | Water sample data | 2004-05-03 05:31:00 | 24.50279 N, 28.98761 W | RRS Discovery D279 |
| 1059294 | CTD or STD cast | 2004-05-03 12:04:00 | 24.50117 N, 28.06867 W | RRS Discovery D279 |
| 1262175 | Water sample data | 2004-05-03 13:40:30 | 24.50125 N, 28.06863 W | RRS Discovery D279 |
| 1263897 | Water sample data | 2004-05-03 13:40:30 | 24.50125 N, 28.06863 W | RRS Discovery D279 |
| 1059301 | CTD or STD cast | 2004-05-03 20:13:00 | 24.51183 N, 27.1485 W | RRS Discovery D279 |
| 1262187 | Water sample data | 2004-05-03 21:51:00 | 24.51183 N, 27.14855 W | RRS Discovery D279 |
| 669562 | Currents -subsurface Eulerian | 2004-05-04 00:01:08 | 24.52783 N, 27.0845 W | RRS Discovery D279 |
| 670378 | Currents -subsurface Eulerian | 2004-05-04 00:01:10 | 24.52783 N, 27.0845 W | RRS Discovery D279 |
| 1059313 | CTD or STD cast | 2004-05-04 04:27:00 | 24.499 N, 26.23133 W | RRS Discovery D279 |
| 1262199 | Water sample data | 2004-05-04 06:00:30 | 24.49902 N, 26.23132 W | RRS Discovery D279 |
| 1263904 | Water sample data | 2004-05-04 06:00:30 | 24.49902 N, 26.23132 W | RRS Discovery D279 |
| 1059325 | CTD or STD cast | 2004-05-04 12:13:00 | 24.50117 N, 25.31767 W | RRS Discovery D279 |
| 1262206 | Water sample data | 2004-05-04 13:41:00 | 24.50115 N, 25.31769 W | RRS Discovery D279 |
| 1059337 | CTD or STD cast | 2004-05-04 20:22:00 | 24.49533 N, 24.404 W | RRS Discovery D279 |
| 1262218 | Water sample data | 2004-05-04 21:53:00 | 24.49529 N, 24.40399 W | RRS Discovery D279 |
| 669574 | Currents -subsurface Eulerian | 2004-05-05 00:01:06 | 24.4945 N, 24.3445 W | RRS Discovery D279 |
| 670391 | Currents -subsurface Eulerian | 2004-05-05 00:01:14 | 24.49467 N, 24.34417 W | RRS Discovery D279 |
| 1059349 | CTD or STD cast | 2004-05-05 04:31:00 | 24.51333 N, 23.49467 W | RRS Discovery D279 |
| 1262231 | Water sample data | 2004-05-05 05:59:00 | 24.51341 N, 23.49472 W | RRS Discovery D279 |
| 1059350 | CTD or STD cast | 2004-05-05 11:36:00 | 24.73817 N, 22.82233 W | RRS Discovery D279 |
| 1262243 | Water sample data | 2004-05-05 13:00:30 | 24.73816 N, 22.82232 W | RRS Discovery D279 |
| 1263916 | Water sample data | 2004-05-05 13:00:30 | 24.73816 N, 22.82232 W | RRS Discovery D279 |
| 1059362 | CTD or STD cast | 2004-05-05 18:40:00 | 24.985 N, 22.1485 W | RRS Discovery D279 |
| 1262255 | Water sample data | 2004-05-05 20:05:30 | 24.98499 N, 22.14856 W | RRS Discovery D279 |
| 669586 | Currents -subsurface Eulerian | 2004-05-06 00:01:10 | 25.13767 N, 21.69683 W | RRS Discovery D279 |
| 670409 | Currents -subsurface Eulerian | 2004-05-06 00:01:18 | 25.13783 N, 21.69633 W | RRS Discovery D279 |
| 1059374 | CTD or STD cast | 2004-05-06 01:18:00 | 25.22167 N, 21.47767 W | RRS Discovery D279 |
| 1262267 | Water sample data | 2004-05-06 02:48:30 | 25.22166 N, 21.47765 W | RRS Discovery D279 |
| 1059386 | CTD or STD cast | 2004-05-06 08:20:00 | 25.45017 N, 20.8045 W | RRS Discovery D279 |
| 1262279 | Water sample data | 2004-05-06 09:49:00 | 25.4502 N, 20.80444 W | RRS Discovery D279 |
| 1059398 | CTD or STD cast | 2004-05-06 16:19:00 | 25.64983 N, 20.24267 W | RRS Discovery D279 |
| 1262280 | Water sample data | 2004-05-06 17:37:00 | 25.64986 N, 20.24262 W | RRS Discovery D279 |
| 1263928 | Water sample data | 2004-05-06 17:37:00 | 25.64986 N, 20.24262 W | RRS Discovery D279 |
| 669598 | Currents -subsurface Eulerian | 2004-05-07 00:01:11 | 25.93033 N, 19.48033 W | RRS Discovery D279 |
| 670410 | Currents -subsurface Eulerian | 2004-05-07 00:01:22 | 25.9305 N, 19.48033 W | RRS Discovery D279 |
| 1059405 | CTD or STD cast | 2004-05-07 07:40:00 | 25.92033 N, 19.48617 W | RRS Discovery D279 |
| 1262292 | Water sample data | 2004-05-07 08:55:30 | 25.9204 N, 19.48611 W | RRS Discovery D279 |
| 1059417 | CTD or STD cast | 2004-05-07 13:35:00 | 26.13367 N, 18.90983 W | RRS Discovery D279 |
| 1262311 | Water sample data | 2004-05-07 14:36:00 | 26.13359 N, 18.90979 W | RRS Discovery D279 |
| 1263941 | Water sample data | 2004-05-07 14:36:00 | 26.13359 N, 18.90979 W | RRS Discovery D279 |
| 1059429 | CTD or STD cast | 2004-05-07 20:00:00 | 26.3855 N, 18.16067 W | RRS Discovery D279 |
| 1262323 | Water sample data | 2004-05-07 21:09:00 | 26.38548 N, 18.16072 W | RRS Discovery D279 |
| 669605 | Currents -subsurface Eulerian | 2004-05-08 00:01:14 | 26.47383 N, 17.85767 W | RRS Discovery D279 |
| 670422 | Currents -subsurface Eulerian | 2004-05-08 00:01:27 | 26.474 N, 17.85683 W | RRS Discovery D279 |
| 1059430 | CTD or STD cast | 2004-05-08 02:09:00 | 26.5965 N, 17.469 W | RRS Discovery D279 |
| 1262335 | Water sample data | 2004-05-08 03:19:30 | 26.59654 N, 17.46892 W | RRS Discovery D279 |
| 1059442 | CTD or STD cast | 2004-05-08 08:25:00 | 26.8145 N, 16.7845 W | RRS Discovery D279 |
| 1262347 | Water sample data | 2004-05-08 09:35:00 | 26.81446 N, 16.78454 W | RRS Discovery D279 |
| 1059454 | CTD or STD cast | 2004-05-08 15:31:00 | 27.04317 N, 16.122 W | RRS Discovery D279 |
| 1262359 | Water sample data | 2004-05-08 16:36:30 | 27.04313 N, 16.12192 W | RRS Discovery D279 |
| 1263953 | Water sample data | 2004-05-08 16:36:30 | 27.04313 N, 16.12192 W | RRS Discovery D279 |
| 1059466 | CTD or STD cast | 2004-05-08 20:50:00 | 27.2335 N, 15.59217 W | RRS Discovery D279 |
| 1262360 | Water sample data | 2004-05-08 21:49:30 | 27.23351 N, 15.59212 W | RRS Discovery D279 |
| 669617 | Currents -subsurface Eulerian | 2004-05-09 00:01:17 | 27.283 N, 15.4135 W | RRS Discovery D279 |
| 670434 | Currents -subsurface Eulerian | 2004-05-09 00:01:31 | 27.28317 N, 15.41283 W | RRS Discovery D279 |
| 1059478 | CTD or STD cast | 2004-05-09 03:15:00 | 27.43333 N, 14.86033 W | RRS Discovery D279 |
| 1262372 | Water sample data | 2004-05-09 04:03:30 | 27.43333 N, 14.86033 W | RRS Discovery D279 |
| 1059491 | CTD or STD cast | 2004-05-09 08:34:00 | 27.62067 N, 14.22867 W | RRS Discovery D279 |
| 1262384 | Water sample data | 2004-05-09 09:15:30 | 27.62067 N, 14.2287 W | RRS Discovery D279 |
| 1059509 | CTD or STD cast | 2004-05-09 12:38:00 | 27.82917 N, 13.8175 W | RRS Discovery D279 |
| 1262396 | Water sample data | 2004-05-09 13:06:30 | 27.82909 N, 13.81754 W | RRS Discovery D279 |
| 1058149 | CTD or STD cast | 2004-05-09 15:21:00 | 27.8525 N, 13.551 W | RRS Discovery D279 |
| 1262403 | Water sample data | 2004-05-09 15:48:00 | 27.85246 N, 13.55102 W | RRS Discovery D279 |
| 1058150 | CTD or STD cast | 2004-05-09 17:16:00 | 27.88 N, 13.42 W | RRS Discovery D279 |
| 1262415 | Water sample data | 2004-05-09 17:33:30 | 27.88 N, 13.41992 W | RRS Discovery D279 |
| 1058162 | CTD or STD cast | 2004-05-09 18:38:00 | 27.91583 N, 13.37383 W | RRS Discovery D279 |
| 1262427 | Water sample data | 2004-05-09 18:50:00 | 27.91582 N, 13.37385 W | RRS Discovery D279 |
| 1193136 | Currents -subsurface Eulerian | 2010-01-06 07:37:25 | 26.6371 N, 79.0754 W | RRS Discovery D346 |
| 1028897 | Currents -subsurface Eulerian | 2010-01-06 07:39:35 | 26.6414 N, 79.0798 W | RRS Discovery D346 |
| 1016859 | CTD or STD cast | 2010-01-06 16:49:44 | 27.835 N, 78.8402 W | RRS Discovery D346 |
| 1016860 | CTD or STD cast | 2010-01-07 04:19:57 | 27.3382 N, 79.9475 W | RRS Discovery D346 |
| 1342255 | Water sample data | 2010-01-07 04:31:30 | 27.33804 N, 79.9478 W | RRS Discovery D346 |
| 1344298 | Water sample data | 2010-01-07 04:31:30 | 27.33804 N, 79.9478 W | RRS Discovery D346 |
| 1016872 | CTD or STD cast | 2010-01-07 05:54:33 | 27.3456 N, 79.8516 W | RRS Discovery D346 |
| 1342267 | Water sample data | 2010-01-07 06:10:30 | 27.34605 N, 79.85183 W | RRS Discovery D346 |
| 1344305 | Water sample data | 2010-01-07 06:10:30 | 27.34605 N, 79.85183 W | RRS Discovery D346 |
| 1016884 | CTD or STD cast | 2010-01-07 07:51:44 | 27.3518 N, 79.7548 W | RRS Discovery D346 |
| 1342279 | Water sample data | 2010-01-07 08:15:30 | 27.35158 N, 79.75398 W | RRS Discovery D346 |
| 1344317 | Water sample data | 2010-01-07 08:15:30 | 27.35158 N, 79.75398 W | RRS Discovery D346 |
| 1016896 | CTD or STD cast | 2010-01-07 10:04:16 | 27.3402 N, 79.6742 W | RRS Discovery D346 |
| 1342280 | Water sample data | 2010-01-07 10:33:00 | 27.34112 N, 79.67438 W | RRS Discovery D346 |
| 1344329 | Water sample data | 2010-01-07 10:33:00 | 27.34112 N, 79.67438 W | RRS Discovery D346 |
| 1016903 | CTD or STD cast | 2010-01-07 12:41:28 | 27.344 N, 79.5779 W | RRS Discovery D346 |
| 1342292 | Water sample data | 2010-01-07 13:18:00 | 27.34423 N, 79.57801 W | RRS Discovery D346 |
| 1344330 | Water sample data | 2010-01-07 13:18:00 | 27.34423 N, 79.57801 W | RRS Discovery D346 |
| 1016915 | CTD or STD cast | 2010-01-07 15:33:24 | 27.3443 N, 79.5024 W | RRS Discovery D346 |
| 1342311 | Water sample data | 2010-01-07 15:59:30 | 27.34771 N, 79.50364 W | RRS Discovery D346 |
| 1344342 | Water sample data | 2010-01-07 15:59:30 | 27.34771 N, 79.50364 W | RRS Discovery D346 |
| 1016927 | CTD or STD cast | 2010-01-07 17:53:11 | 27.3472 N, 79.4168 W | RRS Discovery D346 |
| 1342323 | Water sample data | 2010-01-07 18:27:30 | 27.35106 N, 79.41633 W | RRS Discovery D346 |
| 1344354 | Water sample data | 2010-01-07 18:27:30 | 27.35106 N, 79.41633 W | RRS Discovery D346 |
| 1016939 | CTD or STD cast | 2010-01-07 20:23:31 | 27.3335 N, 79.3357 W | RRS Discovery D346 |
| 1342335 | Water sample data | 2010-01-07 20:48:30 | 27.33586 N, 79.33549 W | RRS Discovery D346 |
| 1344366 | Water sample data | 2010-01-07 20:48:30 | 27.33586 N, 79.33549 W | RRS Discovery D346 |
| 1016940 | CTD or STD cast | 2010-01-07 22:31:48 | 27.3323 N, 79.2504 W | RRS Discovery D346 |
| 1342347 | Water sample data | 2010-01-07 22:49:00 | 27.3329 N, 79.25042 W | RRS Discovery D346 |
| 1016952 | CTD or STD cast | 2010-01-08 00:16:51 | 27.3352 N, 79.2083 W | RRS Discovery D346 |
| 1342359 | Water sample data | 2010-01-08 00:34:30 | 27.3349 N, 79.20777 W | RRS Discovery D346 |
| 1344378 | Water sample data | 2010-01-08 00:34:30 | 27.3349 N, 79.20777 W | RRS Discovery D346 |
| 1016964 | CTD or STD cast | 2010-01-08 02:04:45 | 27.3382 N, 79.1836 W | RRS Discovery D346 |
| 1342360 | Water sample data | 2010-01-08 02:16:30 | 27.3387 N, 79.18341 W | RRS Discovery D346 |
| 1344391 | Water sample data | 2010-01-08 02:16:30 | 27.3387 N, 79.18341 W | RRS Discovery D346 |
| 1016976 | CTD or STD cast | 2010-01-08 04:01:57 | 27.3347 N, 79.1742 W | RRS Discovery D346 |
| 1344409 | Water sample data | 2010-01-08 04:09:30 | 27.33507 N, 79.17418 W | RRS Discovery D346 |
| 1016988 | CTD or STD cast | 2010-01-08 18:54:09 | 26.5012 N, 76.9342 W | RRS Discovery D346 |
| 1342372 | Water sample data | 2010-01-08 19:09:30 | 26.50108 N, 76.93452 W | RRS Discovery D346 |
| 1344410 | Water sample data | 2010-01-08 19:09:30 | 26.50108 N, 76.93452 W | RRS Discovery D346 |
| 1017003 | CTD or STD cast | 2010-01-08 20:35:52 | 26.4989 N, 76.8648 W | RRS Discovery D346 |
| 1342384 | Water sample data | 2010-01-08 21:21:30 | 26.4984 N, 76.86464 W | RRS Discovery D346 |
| 1344422 | Water sample data | 2010-01-08 21:21:30 | 26.4984 N, 76.86464 W | RRS Discovery D346 |
| 1017015 | CTD or STD cast | 2010-01-08 23:27:40 | 26.5328 N, 76.8162 W | RRS Discovery D346 |
| 1344434 | Water sample data | 2010-01-09 00:28:30 | 26.53293 N, 76.81668 W | RRS Discovery D346 |
| 1017027 | CTD or STD cast | 2010-01-09 03:13:18 | 26.5032 N, 76.7821 W | RRS Discovery D346 |
| 1342396 | Water sample data | 2010-01-09 04:19:00 | 26.50393 N, 76.78135 W | RRS Discovery D346 |
| 1344446 | Water sample data | 2010-01-09 04:19:00 | 26.50393 N, 76.78135 W | RRS Discovery D346 |
| 1017039 | CTD or STD cast | 2010-01-09 06:55:58 | 26.4988 N, 76.8008 W | RRS Discovery D346 |
| 1344458 | Water sample data | 2010-01-09 07:51:30 | 26.49865 N, 76.80089 W | RRS Discovery D346 |
| 1017040 | CTD or STD cast | 2010-01-09 10:02:51 | 26.4957 N, 76.7613 W | RRS Discovery D346 |
| 1342403 | Water sample data | 2010-01-09 12:03:30 | 26.49469 N, 76.76098 W | RRS Discovery D346 |
| 1344471 | Water sample data | 2010-01-09 12:03:30 | 26.49469 N, 76.76098 W | RRS Discovery D346 |
| 1017052 | CTD or STD cast | 2010-01-09 16:12:40 | 26.4992 N, 76.6826 W | RRS Discovery D346 |
| 1342415 | Water sample data | 2010-01-09 18:20:00 | 26.49875 N, 76.68424 W | RRS Discovery D346 |
| 1344483 | Water sample data | 2010-01-09 18:20:00 | 26.49875 N, 76.68424 W | RRS Discovery D346 |
| 1017064 | CTD or STD cast | 2010-01-09 23:15:14 | 26.4971 N, 76.6298 W | RRS Discovery D346 |
| 1342427 | Water sample data | 2010-01-10 01:14:30 | 26.49684 N, 76.62938 W | RRS Discovery D346 |
| 1344495 | Water sample data | 2010-01-10 01:14:30 | 26.49684 N, 76.62938 W | RRS Discovery D346 |
| 1017076 | CTD or STD cast | 2010-01-10 05:21:19 | 26.4961 N, 76.5379 W | RRS Discovery D346 |
| 1342439 | Water sample data | 2010-01-10 07:12:00 | 26.49494 N, 76.53818 W | RRS Discovery D346 |
| 1344502 | Water sample data | 2010-01-10 07:12:00 | 26.49494 N, 76.53818 W | RRS Discovery D346 |
| 1017088 | CTD or STD cast | 2010-01-10 13:48:19 | 26.4837 N, 76.4433 W | RRS Discovery D346 |
| 1342440 | Water sample data | 2010-01-10 15:48:00 | 26.48189 N, 76.44609 W | RRS Discovery D346 |
| 1344514 | Water sample data | 2010-01-10 15:48:00 | 26.48189 N, 76.44609 W | RRS Discovery D346 |
| 1017107 | CTD or STD cast | 2010-01-10 19:47:24 | 26.4959 N, 76.3029 W | RRS Discovery D346 |
| 1342452 | Water sample data | 2010-01-10 21:51:30 | 26.49375 N, 76.30589 W | RRS Discovery D346 |
| 1344526 | Water sample data | 2010-01-10 21:51:30 | 26.49375 N, 76.30589 W | RRS Discovery D346 |
| 1017119 | CTD or STD cast | 2010-01-11 01:49:13 | 26.4871 N, 76.2249 W | RRS Discovery D346 |
| 1342464 | Water sample data | 2010-01-11 03:50:00 | 26.48586 N, 76.22706 W | RRS Discovery D346 |
| 1344538 | Water sample data | 2010-01-11 03:50:00 | 26.48586 N, 76.22706 W | RRS Discovery D346 |
| 1017120 | CTD or STD cast | 2010-01-11 13:50:38 | 26.4958 N, 76.1087 W | RRS Discovery D346 |
| 1342476 | Water sample data | 2010-01-11 15:47:30 | 26.49558 N, 76.10989 W | RRS Discovery D346 |
| 1344551 | Water sample data | 2010-01-11 15:47:30 | 26.49558 N, 76.10989 W | RRS Discovery D346 |
| 1017132 | CTD or STD cast | 2010-01-11 19:54:21 | 26.5018 N, 75.9088 W | RRS Discovery D346 |
| 1342488 | Water sample data | 2010-01-11 21:55:00 | 26.5022 N, 75.91209 W | RRS Discovery D346 |
| 1344563 | Water sample data | 2010-01-11 21:55:00 | 26.5022 N, 75.91209 W | RRS Discovery D346 |
| 1017144 | CTD or STD cast | 2010-01-12 02:11:17 | 26.4985 N, 75.726 W | RRS Discovery D346 |
| 1342507 | Water sample data | 2010-01-12 04:02:00 | 26.49871 N, 75.72734 W | RRS Discovery D346 |
| 1344575 | Water sample data | 2010-01-12 04:02:00 | 26.49871 N, 75.72734 W | RRS Discovery D346 |
| 1017156 | CTD or STD cast | 2010-01-12 07:56:03 | 26.5005 N, 75.5089 W | RRS Discovery D346 |
| 1342519 | Water sample data | 2010-01-12 09:46:00 | 26.49974 N, 75.51019 W | RRS Discovery D346 |
| 1344587 | Water sample data | 2010-01-12 09:46:00 | 26.49974 N, 75.51019 W | RRS Discovery D346 |
| 1017168 | CTD or STD cast | 2010-01-12 13:26:37 | 26.4969 N, 75.312 W | RRS Discovery D346 |
| 1342520 | Water sample data | 2010-01-12 15:19:30 | 26.49867 N, 75.31252 W | RRS Discovery D346 |
| 1344599 | Water sample data | 2010-01-12 15:19:30 | 26.49867 N, 75.31252 W | RRS Discovery D346 |
| 1017181 | CTD or STD cast | 2010-01-12 19:12:23 | 26.5032 N, 75.0731 W | RRS Discovery D346 |
| 1342532 | Water sample data | 2010-01-12 21:02:00 | 26.50328 N, 75.07471 W | RRS Discovery D346 |
| 1344606 | Water sample data | 2010-01-12 21:02:00 | 26.50328 N, 75.07471 W | RRS Discovery D346 |
| 1017193 | CTD or STD cast | 2010-01-13 00:51:19 | 26.4966 N, 74.8041 W | RRS Discovery D346 |
| 1342544 | Water sample data | 2010-01-13 02:44:00 | 26.4942 N, 74.80497 W | RRS Discovery D346 |
| 1344618 | Water sample data | 2010-01-13 02:44:00 | 26.4942 N, 74.80497 W | RRS Discovery D346 |
| 1017200 | CTD or STD cast | 2010-01-13 06:37:22 | 26.498 N, 74.5169 W | RRS Discovery D346 |
| 1342556 | Water sample data | 2010-01-13 08:23:30 | 26.49863 N, 74.51781 W | RRS Discovery D346 |
| 1344631 | Water sample data | 2010-01-13 08:23:30 | 26.49863 N, 74.51781 W | RRS Discovery D346 |
| 1017212 | CTD or STD cast | 2010-01-13 12:17:23 | 26.498 N, 74.2419 W | RRS Discovery D346 |
| 1342568 | Water sample data | 2010-01-13 14:01:30 | 26.49713 N, 74.24363 W | RRS Discovery D346 |
| 1344643 | Water sample data | 2010-01-13 14:01:30 | 26.49713 N, 74.24363 W | RRS Discovery D346 |
| 1017224 | CTD or STD cast | 2010-01-13 18:01:56 | 26.5031 N, 73.9388 W | RRS Discovery D346 |
| 1342581 | Water sample data | 2010-01-13 19:54:30 | 26.5028 N, 73.94002 W | RRS Discovery D346 |
| 1344655 | Water sample data | 2010-01-13 19:54:30 | 26.5028 N, 73.94002 W | RRS Discovery D346 |
| 1017236 | CTD or STD cast | 2010-01-14 00:23:58 | 26.5164 N, 73.5857 W | RRS Discovery D346 |
| 1342593 | Water sample data | 2010-01-14 02:18:30 | 26.51838 N, 73.58549 W | RRS Discovery D346 |
| 1344667 | Water sample data | 2010-01-14 02:18:30 | 26.51838 N, 73.58549 W | RRS Discovery D346 |
| 1017248 | CTD or STD cast | 2010-01-14 07:00:21 | 26.5102 N, 73.2055 W | RRS Discovery D346 |
| 1342600 | Water sample data | 2010-01-14 08:53:00 | 26.51268 N, 73.20587 W | RRS Discovery D346 |
| 1344679 | Water sample data | 2010-01-14 08:53:00 | 26.51268 N, 73.20587 W | RRS Discovery D346 |
| 1017261 | CTD or STD cast | 2010-01-14 13:20:01 | 26.5059 N, 72.8415 W | RRS Discovery D346 |
| 1342612 | Water sample data | 2010-01-14 15:19:00 | 26.50665 N, 72.84284 W | RRS Discovery D346 |
| 1017273 | CTD or STD cast | 2010-01-14 20:04:06 | 26.5077 N, 72.4638 W | RRS Discovery D346 |
| 1342624 | Water sample data | 2010-01-14 22:06:30 | 26.51143 N, 72.46429 W | RRS Discovery D346 |
| 1344680 | Water sample data | 2010-01-14 22:06:30 | 26.51143 N, 72.46429 W | RRS Discovery D346 |
| 1017285 | CTD or STD cast | 2010-01-15 02:45:17 | 26.5136 N, 72.1067 W | RRS Discovery D346 |
| 1342636 | Water sample data | 2010-01-15 04:48:30 | 26.51372 N, 72.10567 W | RRS Discovery D346 |
| 1344692 | Water sample data | 2010-01-15 04:48:30 | 26.51372 N, 72.10567 W | RRS Discovery D346 |
| 1017297 | CTD or STD cast | 2010-01-15 09:36:12 | 26.5137 N, 71.7189 W | RRS Discovery D346 |
| 1342648 | Water sample data | 2010-01-15 11:55:30 | 26.51671 N, 71.71356 W | RRS Discovery D346 |
| 1344711 | Water sample data | 2010-01-15 11:55:30 | 26.51671 N, 71.71356 W | RRS Discovery D346 |
| 1017304 | CTD or STD cast | 2010-01-15 16:39:02 | 26.4959 N, 71.3615 W | RRS Discovery D346 |
| 1342661 | Water sample data | 2010-01-15 18:41:00 | 26.49692 N, 71.36012 W | RRS Discovery D346 |
| 1344723 | Water sample data | 2010-01-15 18:41:00 | 26.49692 N, 71.36012 W | RRS Discovery D346 |
| 1017316 | CTD or STD cast | 2010-01-15 23:14:46 | 26.4757 N, 71.0042 W | RRS Discovery D346 |
| 1342673 | Water sample data | 2010-01-16 01:28:30 | 26.47532 N, 71.0031 W | RRS Discovery D346 |
| 1344735 | Water sample data | 2010-01-16 01:28:30 | 26.47532 N, 71.0031 W | RRS Discovery D346 |
| 1017328 | CTD or STD cast | 2010-01-16 07:15:08 | 26.1026 N, 70.6338 W | RRS Discovery D346 |
| 1342685 | Water sample data | 2010-01-16 09:28:00 | 26.10572 N, 70.63513 W | RRS Discovery D346 |
| 1344747 | Water sample data | 2010-01-16 09:28:00 | 26.10572 N, 70.63513 W | RRS Discovery D346 |
| 1017341 | CTD or STD cast | 2010-01-16 15:26:34 | 25.699 N, 70.2657 W | RRS Discovery D346 |
| 1342697 | Water sample data | 2010-01-16 17:30:00 | 25.69979 N, 70.26573 W | RRS Discovery D346 |
| 1344759 | Water sample data | 2010-01-16 17:30:00 | 25.69979 N, 70.26573 W | RRS Discovery D346 |
| 1017353 | CTD or STD cast | 2010-01-16 23:16:01 | 25.3052 N, 69.9027 W | RRS Discovery D346 |
| 1342704 | Water sample data | 2010-01-17 01:09:00 | 25.30513 N, 69.90303 W | RRS Discovery D346 |
| 1344760 | Water sample data | 2010-01-17 01:09:00 | 25.30513 N, 69.90303 W | RRS Discovery D346 |
| 1017365 | CTD or STD cast | 2010-01-17 06:58:12 | 24.9046 N, 69.5358 W | RRS Discovery D346 |
| 1342716 | Water sample data | 2010-01-17 08:53:30 | 24.90678 N, 69.53661 W | RRS Discovery D346 |
| 1344772 | Water sample data | 2010-01-17 08:53:30 | 24.90678 N, 69.53661 W | RRS Discovery D346 |
| 1017377 | CTD or STD cast | 2010-01-17 14:35:13 | 24.505 N, 69.1528 W | RRS Discovery D346 |
| 1342728 | Water sample data | 2010-01-17 16:27:30 | 24.5057 N, 69.15375 W | RRS Discovery D346 |
| 1344784 | Water sample data | 2010-01-17 16:27:30 | 24.5057 N, 69.15375 W | RRS Discovery D346 |
| 1017389 | CTD or STD cast | 2010-01-17 23:07:47 | 24.5094 N, 68.4072 W | RRS Discovery D346 |
| 1342741 | Water sample data | 2010-01-18 01:05:30 | 24.50824 N, 68.40497 W | RRS Discovery D346 |
| 1344796 | Water sample data | 2010-01-18 01:05:30 | 24.50824 N, 68.40497 W | RRS Discovery D346 |
| 1017390 | CTD or STD cast | 2010-01-18 08:04:51 | 24.5084 N, 67.67 W | RRS Discovery D346 |
| 1342753 | Water sample data | 2010-01-18 09:59:00 | 24.5104 N, 67.66965 W | RRS Discovery D346 |
| 1344803 | Water sample data | 2010-01-18 09:59:00 | 24.5104 N, 67.66965 W | RRS Discovery D346 |
| 1017408 | CTD or STD cast | 2010-01-18 16:05:22 | 24.4999 N, 66.9392 W | RRS Discovery D346 |
| 1342765 | Water sample data | 2010-01-18 18:03:00 | 24.49903 N, 66.9409 W | RRS Discovery D346 |
| 1344815 | Water sample data | 2010-01-18 18:03:00 | 24.49903 N, 66.9409 W | RRS Discovery D346 |
| 1017421 | CTD or STD cast | 2010-01-19 00:15:47 | 24.4991 N, 66.2105 W | RRS Discovery D346 |
| 1342777 | Water sample data | 2010-01-19 01:58:30 | 24.49835 N, 66.20922 W | RRS Discovery D346 |
| 1344827 | Water sample data | 2010-01-19 01:58:30 | 24.49835 N, 66.20922 W | RRS Discovery D346 |
| 1017433 | CTD or STD cast | 2010-01-19 07:57:03 | 24.5016 N, 65.4893 W | RRS Discovery D346 |
| 1342789 | Water sample data | 2010-01-19 10:00:30 | 24.5019 N, 65.49149 W | RRS Discovery D346 |
| 1344839 | Water sample data | 2010-01-19 10:00:30 | 24.5019 N, 65.49149 W | RRS Discovery D346 |
| 1017445 | CTD or STD cast | 2010-01-19 16:43:48 | 24.4989 N, 64.7677 W | RRS Discovery D346 |
| 1342790 | Water sample data | 2010-01-19 18:52:30 | 24.49843 N, 64.76879 W | RRS Discovery D346 |
| 1344840 | Water sample data | 2010-01-19 18:52:30 | 24.49843 N, 64.76879 W | RRS Discovery D346 |
| 1017457 | CTD or STD cast | 2010-01-20 01:50:12 | 24.5136 N, 64.0161 W | RRS Discovery D346 |
| 1342808 | Water sample data | 2010-01-20 03:41:30 | 24.51382 N, 64.01524 W | RRS Discovery D346 |
| 1344852 | Water sample data | 2010-01-20 03:41:30 | 24.51382 N, 64.01524 W | RRS Discovery D346 |
| 1017469 | CTD or STD cast | 2010-01-20 10:06:29 | 24.4954 N, 63.2919 W | RRS Discovery D346 |
| 1342821 | Water sample data | 2010-01-20 11:53:30 | 24.49555 N, 63.29101 W | RRS Discovery D346 |
| 1344864 | Water sample data | 2010-01-20 11:53:30 | 24.49555 N, 63.29101 W | RRS Discovery D346 |
| 1017470 | CTD or STD cast | 2010-01-20 18:06:51 | 24.5011 N, 62.5559 W | RRS Discovery D346 |
| 1342833 | Water sample data | 2010-01-20 20:08:00 | 24.49957 N, 62.5552 W | RRS Discovery D346 |
| 1344876 | Water sample data | 2010-01-20 20:08:00 | 24.49957 N, 62.5552 W | RRS Discovery D346 |
| 1017482 | CTD or STD cast | 2010-01-21 02:46:15 | 24.5084 N, 61.8063 W | RRS Discovery D346 |
| 1342845 | Water sample data | 2010-01-21 04:34:30 | 24.50759 N, 61.80467 W | RRS Discovery D346 |
| 1344888 | Water sample data | 2010-01-21 04:34:30 | 24.50759 N, 61.80467 W | RRS Discovery D346 |
| 1017494 | CTD or STD cast | 2010-01-21 10:24:47 | 24.5016 N, 61.0844 W | RRS Discovery D346 |
| 1342857 | Water sample data | 2010-01-21 12:15:30 | 24.50159 N, 61.08662 W | RRS Discovery D346 |
| 1344907 | Water sample data | 2010-01-21 12:15:30 | 24.50159 N, 61.08662 W | RRS Discovery D346 |
| 1017501 | CTD or STD cast | 2010-01-21 18:17:55 | 24.4995 N, 60.3471 W | RRS Discovery D346 |
| 1342869 | Water sample data | 2010-01-21 20:22:00 | 24.49924 N, 60.34854 W | RRS Discovery D346 |
| 1344919 | Water sample data | 2010-01-21 20:22:00 | 24.49924 N, 60.34854 W | RRS Discovery D346 |
| 1017513 | CTD or STD cast | 2010-01-22 02:45:20 | 24.5062 N, 59.6282 W | RRS Discovery D346 |
| 1342870 | Water sample data | 2010-01-22 04:40:00 | 24.50682 N, 59.62942 W | RRS Discovery D346 |
| 1344920 | Water sample data | 2010-01-22 04:40:00 | 24.50682 N, 59.62942 W | RRS Discovery D346 |
| 1017525 | CTD or STD cast | 2010-01-22 11:17:42 | 24.498 N, 58.8964 W | RRS Discovery D346 |
| 1342882 | Water sample data | 2010-01-22 13:13:00 | 24.49885 N, 58.89326 W | RRS Discovery D346 |
| 1344932 | Water sample data | 2010-01-22 13:13:00 | 24.49885 N, 58.89326 W | RRS Discovery D346 |
| 1017537 | CTD or STD cast | 2010-01-22 19:59:35 | 24.5018 N, 58.1505 W | RRS Discovery D346 |
| 1342894 | Water sample data | 2010-01-22 21:50:00 | 24.50281 N, 58.15082 W | RRS Discovery D346 |
| 1344944 | Water sample data | 2010-01-22 21:50:00 | 24.50281 N, 58.15082 W | RRS Discovery D346 |
| 1017549 | CTD or STD cast | 2010-01-23 04:34:49 | 24.502 N, 57.3985 W | RRS Discovery D346 |
| 1342901 | Water sample data | 2010-01-23 06:47:00 | 24.50162 N, 57.39886 W | RRS Discovery D346 |
| 1344956 | Water sample data | 2010-01-23 06:47:00 | 24.50162 N, 57.39886 W | RRS Discovery D346 |
| 1018332 | CTD or STD cast | 2010-01-23 11:20:12 | 24.4967 N, 57.0506 W | RRS Discovery D346 |
| 1017550 | CTD or STD cast | 2010-01-23 19:57:17 | 24.4891 N, 56.6897 W | RRS Discovery D346 |
| 1342913 | Water sample data | 2010-01-23 22:10:00 | 24.48782 N, 56.69055 W | RRS Discovery D346 |
| 1344968 | Water sample data | 2010-01-23 22:10:00 | 24.48782 N, 56.69055 W | RRS Discovery D346 |
| 1017562 | CTD or STD cast | 2010-01-24 05:36:09 | 24.4799 N, 55.9437 W | RRS Discovery D346 |
| 1344981 | Water sample data | 2010-01-24 08:13:00 | 24.47713 N, 55.94313 W | RRS Discovery D346 |
| 1017574 | CTD or STD cast | 2010-01-24 18:34:57 | 24.4963 N, 55.2389 W | RRS Discovery D346 |
| 1342925 | Water sample data | 2010-01-24 20:50:30 | 24.4984 N, 55.24135 W | RRS Discovery D346 |
| 1344993 | Water sample data | 2010-01-24 20:50:30 | 24.4984 N, 55.24135 W | RRS Discovery D346 |
| 1017586 | CTD or STD cast | 2010-01-25 05:52:38 | 24.5097 N, 54.4528 W | RRS Discovery D346 |
| 1342937 | Water sample data | 2010-01-25 08:19:30 | 24.50906 N, 54.45181 W | RRS Discovery D346 |
| 1345007 | Water sample data | 2010-01-25 08:19:30 | 24.50906 N, 54.45181 W | RRS Discovery D346 |
| 1017598 | CTD or STD cast | 2010-01-25 15:08:50 | 24.51 N, 53.938 W | RRS Discovery D346 |
| 1342949 | Water sample data | 2010-01-25 17:33:30 | 24.50845 N, 53.93895 W | RRS Discovery D346 |
| 1345019 | Water sample data | 2010-01-25 17:33:30 | 24.50845 N, 53.93895 W | RRS Discovery D346 |
| 1017605 | CTD or STD cast | 2010-01-26 00:46:48 | 24.8391 N, 53.3993 W | RRS Discovery D346 |
| 1345020 | Water sample data | 2010-01-26 03:04:30 | 24.84099 N, 53.39958 W | RRS Discovery D346 |
| 1017617 | CTD or STD cast | 2010-01-26 09:38:18 | 25.1108 N, 52.8405 W | RRS Discovery D346 |
| 1342950 | Water sample data | 2010-01-26 11:52:00 | 25.11123 N, 52.8402 W | RRS Discovery D346 |
| 1345032 | Water sample data | 2010-01-26 11:52:00 | 25.11123 N, 52.8402 W | RRS Discovery D346 |
| 1017629 | CTD or STD cast | 2010-01-26 17:30:40 | 25.0799 N, 52.2902 W | RRS Discovery D346 |
| 1342962 | Water sample data | 2010-01-26 19:34:00 | 25.077 N, 52.28995 W | RRS Discovery D346 |
| 1345044 | Water sample data | 2010-01-26 19:34:00 | 25.077 N, 52.28995 W | RRS Discovery D346 |
| 1017630 | CTD or STD cast | 2010-01-27 12:19:10 | 25.0222 N, 51.7532 W | RRS Discovery D346 |
| 1342974 | Water sample data | 2010-01-27 14:39:00 | 25.0239 N, 51.75391 W | RRS Discovery D346 |
| 1345056 | Water sample data | 2010-01-27 14:39:00 | 25.0239 N, 51.75391 W | RRS Discovery D346 |
| 1017642 | CTD or STD cast | 2010-01-27 20:32:41 | 24.9374 N, 51.1852 W | RRS Discovery D346 |
| 1342986 | Water sample data | 2010-01-27 22:27:00 | 24.93713 N, 51.18432 W | RRS Discovery D346 |
| 1345068 | Water sample data | 2010-01-27 22:27:00 | 24.93713 N, 51.18432 W | RRS Discovery D346 |
| 1017654 | CTD or STD cast | 2010-01-28 03:37:17 | 24.7984 N, 50.632 W | RRS Discovery D346 |
| 1342998 | Water sample data | 2010-01-28 05:27:30 | 24.79935 N, 50.63183 W | RRS Discovery D346 |
| 1345081 | Water sample data | 2010-01-28 05:27:30 | 24.79935 N, 50.63183 W | RRS Discovery D346 |
| 1017666 | CTD or STD cast | 2010-01-28 10:38:11 | 24.6687 N, 50.0899 W | RRS Discovery D346 |
| 1343001 | Water sample data | 2010-01-28 12:44:00 | 24.66852 N, 50.09264 W | RRS Discovery D346 |
| 1345093 | Water sample data | 2010-01-28 12:44:00 | 24.66852 N, 50.09264 W | RRS Discovery D346 |
| 1017678 | CTD or STD cast | 2010-01-28 18:16:18 | 24.5207 N, 49.5342 W | RRS Discovery D346 |
| 1343013 | Water sample data | 2010-01-28 20:38:00 | 24.52057 N, 49.53572 W | RRS Discovery D346 |
| 1345100 | Water sample data | 2010-01-28 20:38:00 | 24.52057 N, 49.53572 W | RRS Discovery D346 |
| 1017691 | CTD or STD cast | 2010-01-29 02:26:43 | 24.349 N, 49.0082 W | RRS Discovery D346 |
| 1343025 | Water sample data | 2010-01-29 04:19:00 | 24.34836 N, 49.00696 W | RRS Discovery D346 |
| 1345112 | Water sample data | 2010-01-29 04:19:00 | 24.34836 N, 49.00696 W | RRS Discovery D346 |
| 1017709 | CTD or STD cast | 2010-01-29 09:37:27 | 24.196 N, 48.473 W | RRS Discovery D346 |
| 1343037 | Water sample data | 2010-01-29 11:24:30 | 24.1963 N, 48.47379 W | RRS Discovery D346 |
| 1345124 | Water sample data | 2010-01-29 11:24:30 | 24.1963 N, 48.47379 W | RRS Discovery D346 |
| 1017710 | CTD or STD cast | 2010-01-29 16:30:53 | 24.0662 N, 47.9426 W | RRS Discovery D346 |
| 1343049 | Water sample data | 2010-01-29 18:31:00 | 24.06649 N, 47.93983 W | RRS Discovery D346 |
| 1345136 | Water sample data | 2010-01-29 18:31:00 | 24.06649 N, 47.93983 W | RRS Discovery D346 |
| 1017722 | CTD or STD cast | 2010-01-29 23:57:39 | 23.9755 N, 47.4087 W | RRS Discovery D346 |
| 1345148 | Water sample data | 2010-01-30 01:50:00 | 23.97365 N, 47.41016 W | RRS Discovery D346 |
| 1017734 | CTD or STD cast | 2010-01-30 07:40:03 | 23.8992 N, 46.8761 W | RRS Discovery D346 |
| 1343050 | Water sample data | 2010-01-30 09:39:00 | 23.89929 N, 46.87672 W | RRS Discovery D346 |
| 1345161 | Water sample data | 2010-01-30 09:39:00 | 23.89929 N, 46.87672 W | RRS Discovery D346 |
| 1017746 | CTD or STD cast | 2010-01-30 15:19:41 | 23.8739 N, 46.3337 W | RRS Discovery D346 |
| 1343062 | Water sample data | 2010-01-30 17:13:30 | 23.87108 N, 46.33421 W | RRS Discovery D346 |
| 1345173 | Water sample data | 2010-01-30 17:13:30 | 23.87108 N, 46.33421 W | RRS Discovery D346 |
| 1017758 | CTD or STD cast | 2010-01-30 22:51:04 | 23.7669 N, 45.802 W | RRS Discovery D346 |
| 1343074 | Water sample data | 2010-01-31 00:29:30 | 23.76724 N, 45.80241 W | RRS Discovery D346 |
| 1345185 | Water sample data | 2010-01-31 00:29:30 | 23.76724 N, 45.80241 W | RRS Discovery D346 |
| 1017771 | CTD or STD cast | 2010-01-31 05:28:04 | 23.7325 N, 45.27 W | RRS Discovery D346 |
| 1343086 | Water sample data | 2010-01-31 07:03:30 | 23.73259 N, 45.2714 W | RRS Discovery D346 |
| 1345197 | Water sample data | 2010-01-31 07:03:30 | 23.73259 N, 45.2714 W | RRS Discovery D346 |
| 1017783 | CTD or STD cast | 2010-01-31 12:32:54 | 23.6355 N, 44.7354 W | RRS Discovery D346 |
| 1343098 | Water sample data | 2010-01-31 14:08:30 | 23.63517 N, 44.73504 W | RRS Discovery D346 |
| 1345204 | Water sample data | 2010-01-31 14:08:30 | 23.63517 N, 44.73504 W | RRS Discovery D346 |
| 1017795 | CTD or STD cast | 2010-01-31 19:19:54 | 23.5353 N, 44.2091 W | RRS Discovery D346 |
| 1343105 | Water sample data | 2010-01-31 21:02:30 | 23.53593 N, 44.20944 W | RRS Discovery D346 |
| 1345216 | Water sample data | 2010-01-31 21:02:30 | 23.53593 N, 44.20944 W | RRS Discovery D346 |
| 1017802 | CTD or STD cast | 2010-02-01 02:18:59 | 23.45 N, 43.6718 W | RRS Discovery D346 |
| 1343117 | Water sample data | 2010-02-01 04:06:00 | 23.44956 N, 43.67065 W | RRS Discovery D346 |
| 1345228 | Water sample data | 2010-02-01 04:06:00 | 23.44956 N, 43.67065 W | RRS Discovery D346 |
| 1017814 | CTD or STD cast | 2010-02-01 09:21:46 | 23.3727 N, 43.1415 W | RRS Discovery D346 |
| 1343129 | Water sample data | 2010-02-01 11:08:00 | 23.37276 N, 43.14126 W | RRS Discovery D346 |
| 1345241 | Water sample data | 2010-02-01 11:08:00 | 23.37276 N, 43.14126 W | RRS Discovery D346 |
| 1017826 | CTD or STD cast | 2010-02-01 16:18:44 | 23.2503 N, 42.6004 W | RRS Discovery D346 |
| 1343130 | Water sample data | 2010-02-01 18:24:30 | 23.2506 N, 42.60084 W | RRS Discovery D346 |
| 1345253 | Water sample data | 2010-02-01 18:24:30 | 23.2506 N, 42.60084 W | RRS Discovery D346 |
| 1017838 | CTD or STD cast | 2010-02-02 01:44:52 | 23.3847 N, 41.7691 W | RRS Discovery D346 |
| 1343142 | Water sample data | 2010-02-02 03:24:00 | 23.38595 N, 41.76971 W | RRS Discovery D346 |
| 1345265 | Water sample data | 2010-02-02 03:24:00 | 23.38595 N, 41.76971 W | RRS Discovery D346 |
| 1017851 | CTD or STD cast | 2010-02-02 10:05:18 | 23.5204 N, 40.9444 W | RRS Discovery D346 |
| 1343154 | Water sample data | 2010-02-02 11:43:30 | 23.52099 N, 40.94439 W | RRS Discovery D346 |
| 1345277 | Water sample data | 2010-02-02 11:43:30 | 23.52099 N, 40.94439 W | RRS Discovery D346 |
| 1017863 | CTD or STD cast | 2010-02-02 18:31:04 | 23.6671 N, 40.1083 W | RRS Discovery D346 |
| 1343166 | Water sample data | 2010-02-02 20:24:30 | 23.66841 N, 40.10839 W | RRS Discovery D346 |
| 1345289 | Water sample data | 2010-02-02 20:24:30 | 23.66841 N, 40.10839 W | RRS Discovery D346 |
| 1017875 | CTD or STD cast | 2010-02-03 03:18:35 | 23.7994 N, 39.2622 W | RRS Discovery D346 |
| 1343178 | Water sample data | 2010-02-03 05:08:30 | 23.79951 N, 39.26253 W | RRS Discovery D346 |
| 1345290 | Water sample data | 2010-02-03 05:08:30 | 23.79951 N, 39.26253 W | RRS Discovery D346 |
| 1017887 | CTD or STD cast | 2010-02-03 11:54:31 | 23.9348 N, 38.4332 W | RRS Discovery D346 |
| 1343191 | Water sample data | 2010-02-03 13:55:30 | 23.93409 N, 38.43501 W | RRS Discovery D346 |
| 1345308 | Water sample data | 2010-02-03 13:55:30 | 23.93409 N, 38.43501 W | RRS Discovery D346 |
| 1017899 | CTD or STD cast | 2010-02-03 20:50:04 | 24.0895 N, 37.6111 W | RRS Discovery D346 |
| 1343209 | Water sample data | 2010-02-03 22:40:00 | 24.08959 N, 37.61037 W | RRS Discovery D346 |
| 1345321 | Water sample data | 2010-02-03 22:40:00 | 24.08959 N, 37.61037 W | RRS Discovery D346 |
| 1017906 | CTD or STD cast | 2010-02-04 05:31:56 | 24.2193 N, 36.7698 W | RRS Discovery D346 |
| 1343210 | Water sample data | 2010-02-04 07:21:00 | 24.21911 N, 36.76954 W | RRS Discovery D346 |
| 1345333 | Water sample data | 2010-02-04 07:21:00 | 24.21911 N, 36.76954 W | RRS Discovery D346 |
| 1017918 | CTD or STD cast | 2010-02-04 13:54:12 | 24.3634 N, 35.9273 W | RRS Discovery D346 |
| 1343222 | Water sample data | 2010-02-04 15:54:30 | 24.36459 N, 35.9276 W | RRS Discovery D346 |
| 1345345 | Water sample data | 2010-02-04 15:54:30 | 24.36459 N, 35.9276 W | RRS Discovery D346 |
| 1017931 | CTD or STD cast | 2010-02-05 00:52:15 | 24.5062 N, 35.085 W | RRS Discovery D346 |
| 1343234 | Water sample data | 2010-02-05 02:50:00 | 24.50544 N, 35.08704 W | RRS Discovery D346 |
| 1345357 | Water sample data | 2010-02-05 02:50:00 | 24.50544 N, 35.08704 W | RRS Discovery D346 |
| 1017943 | CTD or STD cast | 2010-02-05 08:39:54 | 24.4954 N, 34.4167 W | RRS Discovery D346 |
| 1343246 | Water sample data | 2010-02-05 10:58:30 | 24.49656 N, 34.41498 W | RRS Discovery D346 |
| 1345369 | Water sample data | 2010-02-05 10:58:30 | 24.49656 N, 34.41498 W | RRS Discovery D346 |
| 1018344 | CTD or STD cast | 2010-02-05 15:34:09 | 24.5061 N, 34.0463 W | RRS Discovery D346 |
| 1017955 | CTD or STD cast | 2010-02-05 19:28:58 | 24.4961 N, 33.7285 W | RRS Discovery D346 |
| 1343258 | Water sample data | 2010-02-05 21:19:30 | 24.49568 N, 33.72751 W | RRS Discovery D346 |
| 1345370 | Water sample data | 2010-02-05 21:19:30 | 24.49568 N, 33.72751 W | RRS Discovery D346 |
| 1017967 | CTD or STD cast | 2010-02-06 02:51:21 | 24.5002 N, 33.0449 W | RRS Discovery D346 |
| 1343271 | Water sample data | 2010-02-06 04:47:30 | 24.50075 N, 33.04511 W | RRS Discovery D346 |
| 1345382 | Water sample data | 2010-02-06 04:47:30 | 24.50075 N, 33.04511 W | RRS Discovery D346 |
| 1017979 | CTD or STD cast | 2010-02-06 10:35:08 | 24.494 N, 32.3574 W | RRS Discovery D346 |
| 1343283 | Water sample data | 2010-02-06 12:30:00 | 24.49286 N, 32.35696 W | RRS Discovery D346 |
| 1345394 | Water sample data | 2010-02-06 12:30:00 | 24.49286 N, 32.35696 W | RRS Discovery D346 |
| 1017980 | CTD or STD cast | 2010-02-06 18:07:00 | 24.4976 N, 31.6808 W | RRS Discovery D346 |
| 1343295 | Water sample data | 2010-02-06 20:14:00 | 24.49735 N, 31.68006 W | RRS Discovery D346 |
| 1345401 | Water sample data | 2010-02-06 20:14:00 | 24.49735 N, 31.68006 W | RRS Discovery D346 |
| 1017992 | CTD or STD cast | 2010-02-07 02:21:34 | 24.4964 N, 31.0027 W | RRS Discovery D346 |
| 1343302 | Water sample data | 2010-02-07 04:25:30 | 24.49611 N, 31.00389 W | RRS Discovery D346 |
| 1345413 | Water sample data | 2010-02-07 04:25:30 | 24.49611 N, 31.00389 W | RRS Discovery D346 |
| 1018006 | CTD or STD cast | 2010-02-07 10:39:03 | 24.4919 N, 30.3215 W | RRS Discovery D346 |
| 1343314 | Water sample data | 2010-02-07 12:55:30 | 24.49241 N, 30.32428 W | RRS Discovery D346 |
| 1345425 | Water sample data | 2010-02-07 12:55:30 | 24.49241 N, 30.32428 W | RRS Discovery D346 |
| 1018018 | CTD or STD cast | 2010-02-07 19:30:12 | 24.5028 N, 29.6583 W | RRS Discovery D346 |
| 1343326 | Water sample data | 2010-02-07 21:40:00 | 24.50286 N, 29.65925 W | RRS Discovery D346 |
| 1345437 | Water sample data | 2010-02-07 21:40:00 | 24.50286 N, 29.65925 W | RRS Discovery D346 |
| 1018031 | CTD or STD cast | 2010-02-08 04:13:40 | 24.5009 N, 28.9609 W | RRS Discovery D346 |
| 1343338 | Water sample data | 2010-02-08 06:30:00 | 24.50148 N, 28.96346 W | RRS Discovery D346 |
| 1345449 | Water sample data | 2010-02-08 06:30:00 | 24.50148 N, 28.96346 W | RRS Discovery D346 |
| 1018043 | CTD or STD cast | 2010-02-08 13:03:44 | 24.5009 N, 28.2953 W | RRS Discovery D346 |
| 1343351 | Water sample data | 2010-02-08 15:26:30 | 24.50023 N, 28.29389 W | RRS Discovery D346 |
| 1345450 | Water sample data | 2010-02-08 15:26:30 | 24.50023 N, 28.29389 W | RRS Discovery D346 |
| 1018055 | CTD or STD cast | 2010-02-08 22:15:58 | 24.4916 N, 27.5993 W | RRS Discovery D346 |
| 1343363 | Water sample data | 2010-02-09 00:22:00 | 24.4927 N, 27.60176 W | RRS Discovery D346 |
| 1345462 | Water sample data | 2010-02-09 00:22:00 | 24.4927 N, 27.60176 W | RRS Discovery D346 |
| 1018067 | CTD or STD cast | 2010-02-09 06:37:24 | 24.512 N, 26.9118 W | RRS Discovery D346 |
| 1343375 | Water sample data | 2010-02-09 08:43:00 | 24.51282 N, 26.9139 W | RRS Discovery D346 |
| 1345474 | Water sample data | 2010-02-09 08:43:00 | 24.51282 N, 26.9139 W | RRS Discovery D346 |
| 1018079 | CTD or STD cast | 2010-02-09 15:02:52 | 24.5099 N, 26.225 W | RRS Discovery D346 |
| 1343387 | Water sample data | 2010-02-09 17:03:00 | 24.51089 N, 26.23072 W | RRS Discovery D346 |
| 1345486 | Water sample data | 2010-02-09 17:03:00 | 24.51089 N, 26.23072 W | RRS Discovery D346 |
| 1018080 | CTD or STD cast | 2010-02-09 23:28:37 | 24.5112 N, 25.5416 W | RRS Discovery D346 |
| 1343399 | Water sample data | 2010-02-10 01:35:30 | 24.51277 N, 25.54231 W | RRS Discovery D346 |
| 1345498 | Water sample data | 2010-02-10 01:35:30 | 24.51277 N, 25.54231 W | RRS Discovery D346 |
| 1018092 | CTD or STD cast | 2010-02-10 08:11:21 | 24.5142 N, 24.8471 W | RRS Discovery D346 |
| 1343406 | Water sample data | 2010-02-10 10:03:00 | 24.51549 N, 24.84693 W | RRS Discovery D346 |
| 1345505 | Water sample data | 2010-02-10 10:03:00 | 24.51549 N, 24.84693 W | RRS Discovery D346 |
| 1018111 | CTD or STD cast | 2010-02-10 15:58:39 | 24.4998 N, 24.1647 W | RRS Discovery D346 |
| 1343418 | Water sample data | 2010-02-10 17:49:00 | 24.50054 N, 24.16319 W | RRS Discovery D346 |
| 1345517 | Water sample data | 2010-02-10 17:49:00 | 24.50054 N, 24.16319 W | RRS Discovery D346 |
| 1018123 | CTD or STD cast | 2010-02-10 23:29:08 | 24.4942 N, 23.501 W | RRS Discovery D346 |
| 1343431 | Water sample data | 2010-02-11 01:17:00 | 24.49592 N, 23.50076 W | RRS Discovery D346 |
| 1345529 | Water sample data | 2010-02-11 01:17:00 | 24.49592 N, 23.50076 W | RRS Discovery D346 |
| 1018135 | CTD or STD cast | 2010-02-11 06:51:19 | 24.7142 N, 22.8842 W | RRS Discovery D346 |
| 1343443 | Water sample data | 2010-02-11 08:37:30 | 24.71531 N, 22.88196 W | RRS Discovery D346 |
| 1345530 | Water sample data | 2010-02-11 08:37:30 | 24.71531 N, 22.88196 W | RRS Discovery D346 |
| 1018147 | CTD or STD cast | 2010-02-11 14:07:15 | 24.9187 N, 22.2656 W | RRS Discovery D346 |
| 1343455 | Water sample data | 2010-02-11 15:47:30 | 24.91937 N, 22.2652 W | RRS Discovery D346 |
| 1345542 | Water sample data | 2010-02-11 15:47:30 | 24.91937 N, 22.2652 W | RRS Discovery D346 |
| 1018159 | CTD or STD cast | 2010-02-11 21:09:19 | 25.1367 N, 21.6523 W | RRS Discovery D346 |
| 1343467 | Water sample data | 2010-02-11 22:42:30 | 25.13793 N, 21.6519 W | RRS Discovery D346 |
| 1345554 | Water sample data | 2010-02-11 22:42:30 | 25.13793 N, 21.6519 W | RRS Discovery D346 |
| 1018160 | CTD or STD cast | 2010-02-12 03:51:43 | 25.3346 N, 21.0304 W | RRS Discovery D346 |
| 1343479 | Water sample data | 2010-02-12 05:24:30 | 25.33535 N, 21.03194 W | RRS Discovery D346 |
| 1345566 | Water sample data | 2010-02-12 05:24:30 | 25.33535 N, 21.03194 W | RRS Discovery D346 |
| 1018172 | CTD or STD cast | 2010-02-12 10:32:14 | 25.5458 N, 20.4184 W | RRS Discovery D346 |
| 1343480 | Water sample data | 2010-02-12 12:03:00 | 25.54707 N, 20.41807 W | RRS Discovery D346 |
| 1345578 | Water sample data | 2010-02-12 12:03:00 | 25.54707 N, 20.41807 W | RRS Discovery D346 |
| 1018184 | CTD or STD cast | 2010-02-12 17:10:41 | 25.7426 N, 19.7968 W | RRS Discovery D346 |
| 1343492 | Water sample data | 2010-02-12 18:35:30 | 25.74195 N, 19.79598 W | RRS Discovery D346 |
| 1345591 | Water sample data | 2010-02-12 18:35:30 | 25.74195 N, 19.79598 W | RRS Discovery D346 |
| 1018196 | CTD or STD cast | 2010-02-12 23:39:53 | 25.9624 N, 19.1884 W | RRS Discovery D346 |
| 1343511 | Water sample data | 2010-02-13 00:55:30 | 25.9632 N, 19.18957 W | RRS Discovery D346 |
| 1345609 | Water sample data | 2010-02-13 00:55:30 | 25.9632 N, 19.18957 W | RRS Discovery D346 |
| 1018203 | CTD or STD cast | 2010-02-13 05:53:44 | 26.1676 N, 18.5738 W | RRS Discovery D346 |
| 1343523 | Water sample data | 2010-02-13 07:12:30 | 26.16697 N, 18.57381 W | RRS Discovery D346 |
| 1345610 | Water sample data | 2010-02-13 07:12:30 | 26.16697 N, 18.57381 W | RRS Discovery D346 |
| 1018215 | CTD or STD cast | 2010-02-13 12:12:53 | 26.3764 N, 17.959 W | RRS Discovery D346 |
| 1343535 | Water sample data | 2010-02-13 13:35:00 | 26.37611 N, 17.96116 W | RRS Discovery D346 |
| 1345622 | Water sample data | 2010-02-13 13:35:00 | 26.37611 N, 17.96116 W | RRS Discovery D346 |
| 1018227 | CTD or STD cast | 2010-02-13 18:40:12 | 26.5763 N, 17.3344 W | RRS Discovery D346 |
| 1343547 | Water sample data | 2010-02-13 19:58:00 | 26.57625 N, 17.33568 W | RRS Discovery D346 |
| 1345634 | Water sample data | 2010-02-13 19:58:00 | 26.57625 N, 17.33568 W | RRS Discovery D346 |
| 1018239 | CTD or STD cast | 2010-02-14 01:05:26 | 26.7898 N, 16.7151 W | RRS Discovery D346 |
| 1343559 | Water sample data | 2010-02-14 02:27:00 | 26.78982 N, 16.71396 W | RRS Discovery D346 |
| 1345646 | Water sample data | 2010-02-14 02:27:00 | 26.78982 N, 16.71396 W | RRS Discovery D346 |
| 1018240 | CTD or STD cast | 2010-02-14 07:21:05 | 26.9886 N, 16.0968 W | RRS Discovery D346 |
| 1343560 | Water sample data | 2010-02-14 08:39:30 | 26.98827 N, 16.09626 W | RRS Discovery D346 |
| 1345658 | Water sample data | 2010-02-14 08:39:30 | 26.98827 N, 16.09626 W | RRS Discovery D346 |
| 1018252 | CTD or STD cast | 2010-02-14 13:39:01 | 27.1971 N, 15.483 W | RRS Discovery D346 |
| 1343572 | Water sample data | 2010-02-14 14:54:30 | 27.19634 N, 15.48435 W | RRS Discovery D346 |
| 1345671 | Water sample data | 2010-02-14 14:54:30 | 27.19634 N, 15.48435 W | RRS Discovery D346 |
| 1018264 | CTD or STD cast | 2010-02-14 19:50:24 | 27.4145 N, 14.8686 W | RRS Discovery D346 |
| 1343584 | Water sample data | 2010-02-14 20:56:30 | 27.41372 N, 14.8685 W | RRS Discovery D346 |
| 1345683 | Water sample data | 2010-02-14 20:56:30 | 27.41372 N, 14.8685 W | RRS Discovery D346 |
| 1018276 | CTD or STD cast | 2010-02-15 01:50:00 | 27.6229 N, 14.2368 W | RRS Discovery D346 |
| 1343596 | Water sample data | 2010-02-15 02:40:30 | 27.6221 N, 14.23772 W | RRS Discovery D346 |
| 1345695 | Water sample data | 2010-02-15 02:40:30 | 27.6221 N, 14.23772 W | RRS Discovery D346 |
| 1018288 | CTD or STD cast | 2010-02-15 06:33:01 | 27.7894 N, 13.7772 W | RRS Discovery D346 |
| 1343603 | Water sample data | 2010-02-15 07:23:30 | 27.78881 N, 13.77898 W | RRS Discovery D346 |
| 1345702 | Water sample data | 2010-02-15 07:23:30 | 27.78881 N, 13.77898 W | RRS Discovery D346 |
| 1018307 | CTD or STD cast | 2010-02-15 10:15:31 | 27.8667 N, 13.5561 W | RRS Discovery D346 |
| 1343615 | Water sample data | 2010-02-15 10:48:30 | 27.86678 N, 13.55629 W | RRS Discovery D346 |
| 1345714 | Water sample data | 2010-02-15 10:48:30 | 27.86678 N, 13.55629 W | RRS Discovery D346 |
| 1018319 | CTD or STD cast | 2010-02-15 13:02:52 | 27.9113 N, 13.4101 W | RRS Discovery D346 |
| 1343627 | Water sample data | 2010-02-15 13:25:00 | 27.911 N, 13.41072 W | RRS Discovery D346 |
| 1345726 | Water sample data | 2010-02-15 13:25:00 | 27.911 N, 13.41072 W | RRS Discovery D346 |
| 1018320 | CTD or STD cast | 2010-02-15 15:25:16 | 27.9275 N, 13.3692 W | RRS Discovery D346 |
| 1343639 | Water sample data | 2010-02-15 15:43:00 | 27.92782 N, 13.36938 W | RRS Discovery D346 |
| 1345738 | Water sample data | 2010-02-15 15:43:00 | 27.92782 N, 13.36938 W | RRS Discovery D346 |
| 1816672 | Currents -subsurface Eulerian | 2015-12-06 23:30:39 | 25.08129 N, 77.33905 W | RRS Discovery DY040 |
| 1816660 | Currents -subsurface Eulerian | 2015-12-06 23:50:53 | 25.08343 N, 77.34695 W | RRS Discovery DY040 |
| 1843817 | CTD or STD cast | 2015-12-09 21:27:40 | 26.4336 N, 78.6669 W | RRS Discovery DY040 |
| 1894909 | Water sample data | 2015-12-09 21:48:00 | 26.4336 N, 78.66688 W | RRS Discovery DY040 |
| 1842236 | CTD or STD cast | 2015-12-10 06:51:36 | 27.0016 N, 79.9975 W | RRS Discovery DY040 |
| 1894910 | Water sample data | 2015-12-10 06:54:00 | 27.00157 N, 79.99747 W | RRS Discovery DY040 |
| 1842248 | CTD or STD cast | 2015-12-10 08:14:49 | 27.0038 N, 79.9681 W | RRS Discovery DY040 |
| 1894922 | Water sample data | 2015-12-10 08:20:00 | 27.00379 N, 79.96814 W | RRS Discovery DY040 |
| 1842261 | CTD or STD cast | 2015-12-10 09:47:52 | 27.0048 N, 79.9353 W | RRS Discovery DY040 |
| 1894934 | Water sample data | 2015-12-10 09:57:00 | 27.00485 N, 79.93531 W | RRS Discovery DY040 |
| 1842273 | CTD or STD cast | 2015-12-10 11:35:38 | 27.0079 N, 79.8679 W | RRS Discovery DY040 |
| 1894946 | Water sample data | 2015-12-10 11:44:00 | 27.0079 N, 79.86786 W | RRS Discovery DY040 |
| 1842285 | CTD or STD cast | 2015-12-10 14:19:13 | 27.0191 N, 79.7837 W | RRS Discovery DY040 |
| 1894958 | Water sample data | 2015-12-10 14:37:00 | 27.01906 N, 79.78371 W | RRS Discovery DY040 |
| 1842297 | CTD or STD cast | 2015-12-10 23:21:05 | 27.016 N, 79.7803 W | RRS Discovery DY040 |
| 1894971 | Water sample data | 2015-12-10 23:37:00 | 27.01603 N, 79.78029 W | RRS Discovery DY040 |
| 1842304 | CTD or STD cast | 2015-12-11 02:01:34 | 27.0161 N, 79.681 W | RRS Discovery DY040 |
| 1894983 | Water sample data | 2015-12-11 02:19:00 | 27.01611 N, 79.68102 W | RRS Discovery DY040 |
| 1842316 | CTD or STD cast | 2015-12-11 04:47:24 | 27.0135 N, 79.6161 W | RRS Discovery DY040 |
| 1894995 | Water sample data | 2015-12-11 05:03:00 | 27.01355 N, 79.61612 W | RRS Discovery DY040 |
| 1842328 | CTD or STD cast | 2015-12-11 07:32:18 | 27.0103 N, 79.4994 W | RRS Discovery DY040 |
| 1895009 | Water sample data | 2015-12-11 07:48:00 | 27.01026 N, 79.49937 W | RRS Discovery DY040 |
| 1842341 | CTD or STD cast | 2015-12-11 10:39:27 | 27.0074 N, 79.383 W | RRS Discovery DY040 |
| 1895010 | Water sample data | 2015-12-11 10:55:00 | 27.00736 N, 79.38295 W | RRS Discovery DY040 |
| 1842353 | CTD or STD cast | 2015-12-11 13:38:24 | 27.004 N, 79.2805 W | RRS Discovery DY040 |
| 1895022 | Water sample data | 2015-12-11 13:55:00 | 27.00401 N, 79.28046 W | RRS Discovery DY040 |
| 1842365 | CTD or STD cast | 2015-12-11 16:03:34 | 27.0005 N, 79.1985 W | RRS Discovery DY040 |
| 1895034 | Water sample data | 2015-12-11 16:17:00 | 27.00051 N, 79.19847 W | RRS Discovery DY040 |
| 1842377 | CTD or STD cast | 2015-12-11 18:05:23 | 27.0 N, 79.1751 W | RRS Discovery DY040 |
| 1895046 | Water sample data | 2015-12-11 18:16:00 | 26.99999 N, 79.17506 W | RRS Discovery DY040 |
| 1842389 | CTD or STD cast | 2015-12-11 21:19:44 | 26.9999 N, 79.1582 W | RRS Discovery DY040 |
| 1895058 | Water sample data | 2015-12-11 21:30:00 | 26.99987 N, 79.15816 W | RRS Discovery DY040 |
| 1842390 | CTD or STD cast | 2015-12-12 02:38:21 | 27.0037 N, 79.9312 W | RRS Discovery DY040 |
| 1842408 | CTD or STD cast | 2015-12-12 03:40:29 | 27.0062 N, 79.865 W | RRS Discovery DY040 |
| 1842421 | CTD or STD cast | 2015-12-12 05:09:31 | 27.0148 N, 79.7805 W | RRS Discovery DY040 |
| 1842433 | CTD or STD cast | 2015-12-12 06:39:31 | 27.0165 N, 79.6833 W | RRS Discovery DY040 |
| 1842445 | CTD or STD cast | 2015-12-12 08:04:32 | 27.0173 N, 79.617 W | RRS Discovery DY040 |
| 1842457 | CTD or STD cast | 2015-12-12 09:50:24 | 27.012 N, 79.5017 W | RRS Discovery DY040 |
| 1842469 | CTD or STD cast | 2015-12-12 12:03:47 | 27.0067 N, 79.384 W | RRS Discovery DY040 |
| 1842470 | CTD or STD cast | 2015-12-12 14:00:37 | 27.0014 N, 79.2833 W | RRS Discovery DY040 |
| 1842482 | CTD or STD cast | 2015-12-12 15:44:36 | 26.9985 N, 79.2 W | RRS Discovery DY040 |
| 1842494 | CTD or STD cast | 2015-12-13 14:10:18 | 26.5003 N, 76.9335 W | RRS Discovery DY040 |
| 1895071 | Water sample data | 2015-12-13 14:24:00 | 26.50026 N, 76.93345 W | RRS Discovery DY040 |
| 1842501 | CTD or STD cast | 2015-12-13 16:08:20 | 26.5001 N, 76.8671 W | RRS Discovery DY040 |
| 1895083 | Water sample data | 2015-12-13 16:44:00 | 26.50011 N, 76.86712 W | RRS Discovery DY040 |
| 1842513 | CTD or STD cast | 2015-12-13 18:42:23 | 26.5167 N, 76.8252 W | RRS Discovery DY040 |
| 1895095 | Water sample data | 2015-12-13 19:12:00 | 26.51674 N, 76.82522 W | RRS Discovery DY040 |
| 1842525 | CTD or STD cast | 2015-12-13 20:58:39 | 26.5001 N, 76.8002 W | RRS Discovery DY040 |
| 1895102 | Water sample data | 2015-12-13 21:27:00 | 26.5001 N, 76.80023 W | RRS Discovery DY040 |
| 1842537 | CTD or STD cast | 2015-12-13 23:30:18 | 26.5001 N, 76.7836 W | RRS Discovery DY040 |
| 1895114 | Water sample data | 2015-12-14 00:14:00 | 26.50006 N, 76.78357 W | RRS Discovery DY040 |
| 1842549 | CTD or STD cast | 2015-12-14 02:49:16 | 26.5002 N, 76.7586 W | RRS Discovery DY040 |
| 1895126 | Water sample data | 2015-12-14 04:05:00 | 26.50015 N, 76.75859 W | RRS Discovery DY040 |
| 1842550 | CTD or STD cast | 2015-12-14 07:37:57 | 26.5001 N, 76.6835 W | RRS Discovery DY040 |
| 1895138 | Water sample data | 2015-12-14 09:06:00 | 26.50014 N, 76.68353 W | RRS Discovery DY040 |
| 1842562 | CTD or STD cast | 2015-12-14 13:30:55 | 26.5002 N, 76.6168 W | RRS Discovery DY040 |
| 1895151 | Water sample data | 2015-12-14 14:58:00 | 26.50018 N, 76.61682 W | RRS Discovery DY040 |
| 1842574 | CTD or STD cast | 2015-12-14 18:33:11 | 26.4999 N, 76.5333 W | RRS Discovery DY040 |
| 1895163 | Water sample data | 2015-12-14 20:02:00 | 26.49995 N, 76.53331 W | RRS Discovery DY040 |
| 1842586 | CTD or STD cast | 2015-12-14 23:27:18 | 26.5 N, 76.4333 W | RRS Discovery DY040 |
| 1895175 | Water sample data | 2015-12-15 00:55:00 | 26.50002 N, 76.43329 W | RRS Discovery DY040 |
| 1842598 | CTD or STD cast | 2015-12-15 04:31:56 | 26.5003 N, 76.3002 W | RRS Discovery DY040 |
| 1895187 | Water sample data | 2015-12-15 05:56:00 | 26.50032 N, 76.3002 W | RRS Discovery DY040 |
| 1842605 | CTD or STD cast | 2015-12-15 09:41:45 | 26.5002 N, 76.2167 W | RRS Discovery DY040 |
| 1895199 | Water sample data | 2015-12-15 11:05:00 | 26.50021 N, 76.21672 W | RRS Discovery DY040 |
| 1842617 | CTD or STD cast | 2015-12-15 14:59:13 | 26.5002 N, 76.1002 W | RRS Discovery DY040 |
| 1895206 | Water sample data | 2015-12-15 16:27:00 | 26.50017 N, 76.10016 W | RRS Discovery DY040 |
| 1842629 | CTD or STD cast | 2015-12-18 06:44:57 | 26.5001 N, 76.1004 W | RRS Discovery DY040 |
| 1842630 | CTD or STD cast | 2015-12-18 11:20:29 | 26.5002 N, 75.9001 W | RRS Discovery DY040 |
| 1895218 | Water sample data | 2015-12-18 12:52:00 | 26.50018 N, 75.90009 W | RRS Discovery DY040 |
| 1842642 | CTD or STD cast | 2015-12-18 17:35:36 | 26.5003 N, 75.7003 W | RRS Discovery DY040 |
| 1895231 | Water sample data | 2015-12-18 18:59:00 | 26.50033 N, 75.70033 W | RRS Discovery DY040 |
| 1842654 | CTD or STD cast | 2015-12-18 22:38:31 | 26.5002 N, 75.5 W | RRS Discovery DY040 |
| 1895243 | Water sample data | 2015-12-19 00:01:00 | 26.50021 N, 75.50003 W | RRS Discovery DY040 |
| 1842666 | CTD or STD cast | 2015-12-19 03:36:08 | 26.5002 N, 75.3001 W | RRS Discovery DY040 |
| 1895255 | Water sample data | 2015-12-19 04:56:00 | 26.50017 N, 75.30015 W | RRS Discovery DY040 |
| 1842678 | CTD or STD cast | 2015-12-19 08:30:20 | 26.5007 N, 75.0672 W | RRS Discovery DY040 |
| 1895267 | Water sample data | 2015-12-19 09:59:00 | 26.5007 N, 75.06721 W | RRS Discovery DY040 |
| 1842691 | CTD or STD cast | 2015-12-19 14:14:23 | 26.4997 N, 74.8003 W | RRS Discovery DY040 |
| 1895279 | Water sample data | 2015-12-19 15:38:00 | 26.49974 N, 74.80026 W | RRS Discovery DY040 |
| 1842709 | CTD or STD cast | 2015-12-19 19:39:22 | 26.5004 N, 74.5191 W | RRS Discovery DY040 |
| 1895280 | Water sample data | 2015-12-19 21:02:00 | 26.50042 N, 74.51914 W | RRS Discovery DY040 |
| 1842710 | CTD or STD cast | 2015-12-20 01:32:16 | 26.4997 N, 74.2376 W | RRS Discovery DY040 |
| 1895292 | Water sample data | 2015-12-20 02:58:00 | 26.49966 N, 74.23763 W | RRS Discovery DY040 |
| 1842722 | CTD or STD cast | 2015-12-20 07:08:20 | 26.5007 N, 73.9345 W | RRS Discovery DY040 |
| 1895311 | Water sample data | 2015-12-20 08:31:00 | 26.5007 N, 73.93448 W | RRS Discovery DY040 |
| 1842734 | CTD or STD cast | 2015-12-20 13:28:41 | 26.4979 N, 73.5674 W | RRS Discovery DY040 |
| 1895323 | Water sample data | 2015-12-20 15:03:00 | 26.49786 N, 73.56736 W | RRS Discovery DY040 |
| 1842746 | CTD or STD cast | 2015-12-20 19:47:18 | 26.4994 N, 73.202 W | RRS Discovery DY040 |
| 1895335 | Water sample data | 2015-12-20 21:19:00 | 26.49937 N, 73.20201 W | RRS Discovery DY040 |
| 1842758 | CTD or STD cast | 2015-12-21 02:30:13 | 26.5031 N, 72.8416 W | RRS Discovery DY040 |
| 1895347 | Water sample data | 2015-12-21 04:03:00 | 26.50306 N, 72.8416 W | RRS Discovery DY040 |
| 1842771 | CTD or STD cast | 2015-12-21 09:39:54 | 26.4997 N, 72.3777 W | RRS Discovery DY040 |
| 1895359 | Water sample data | 2015-12-21 11:14:00 | 26.49972 N, 72.37774 W | RRS Discovery DY040 |
| 1842783 | CTD or STD cast | 2015-12-21 17:12:11 | 26.5002 N, 71.9172 W | RRS Discovery DY040 |
| 1895360 | Water sample data | 2015-12-21 18:48:00 | 26.5002 N, 71.91718 W | RRS Discovery DY040 |
| 1842795 | CTD or STD cast | 2015-12-22 00:01:57 | 26.5018 N, 71.4606 W | RRS Discovery DY040 |
| 1895372 | Water sample data | 2015-12-22 01:40:00 | 26.50182 N, 71.46056 W | RRS Discovery DY040 |
| 1842802 | CTD or STD cast | 2015-12-22 07:19:08 | 26.5001 N, 71.0002 W | RRS Discovery DY040 |
| 1895384 | Water sample data | 2015-12-22 08:57:00 | 26.50008 N, 71.00023 W | RRS Discovery DY040 |
| 1842814 | CTD or STD cast | 2015-12-22 16:13:27 | 25.9993 N, 70.5373 W | RRS Discovery DY040 |
| 1895396 | Water sample data | 2015-12-22 17:54:00 | 25.99935 N, 70.53731 W | RRS Discovery DY040 |
| 1842826 | CTD or STD cast | 2015-12-23 00:49:54 | 25.5032 N, 70.0774 W | RRS Discovery DY040 |
| 1895403 | Water sample data | 2015-12-23 02:33:00 | 25.50317 N, 70.07744 W | RRS Discovery DY040 |
| 1842838 | CTD or STD cast | 2015-12-23 09:28:15 | 25.0035 N, 69.615 W | RRS Discovery DY040 |
| 1895415 | Water sample data | 2015-12-23 11:06:00 | 25.00353 N, 69.61504 W | RRS Discovery DY040 |
| 1842851 | CTD or STD cast | 2015-12-23 18:19:34 | 24.4996 N, 69.1511 W | RRS Discovery DY040 |
| 1895427 | Water sample data | 2015-12-23 20:01:00 | 24.49958 N, 69.15108 W | RRS Discovery DY040 |
| 1842863 | CTD or STD cast | 2015-12-24 03:32:56 | 24.5009 N, 68.417 W | RRS Discovery DY040 |
| 1895439 | Water sample data | 2015-12-24 05:11:00 | 24.50095 N, 68.41702 W | RRS Discovery DY040 |
| 1842875 | CTD or STD cast | 2015-12-24 12:30:26 | 24.5 N, 67.6849 W | RRS Discovery DY040 |
| 1895440 | Water sample data | 2015-12-24 14:13:00 | 24.50003 N, 67.68494 W | RRS Discovery DY040 |
| 1842887 | CTD or STD cast | 2015-12-24 22:17:38 | 24.5011 N, 66.9543 W | RRS Discovery DY040 |
| 1895452 | Water sample data | 2015-12-25 00:01:00 | 24.50106 N, 66.95433 W | RRS Discovery DY040 |
| 1842899 | CTD or STD cast | 2015-12-25 07:34:50 | 24.5 N, 66.2176 W | RRS Discovery DY040 |
| 1895464 | Water sample data | 2015-12-25 09:06:00 | 24.49999 N, 66.21761 W | RRS Discovery DY040 |
| 1842906 | CTD or STD cast | 2015-12-25 12:54:14 | 24.4964 N, 66.0287 W | RRS Discovery DY040 |
| 1895476 | Water sample data | 2015-12-25 14:41:00 | 24.49641 N, 66.02868 W | RRS Discovery DY040 |
| 1842918 | CTD or STD cast | 2015-12-25 20:08:00 | 24.4998 N, 65.4843 W | RRS Discovery DY040 |
| 1895488 | Water sample data | 2015-12-25 21:43:00 | 24.49975 N, 65.48434 W | RRS Discovery DY040 |
| 1842931 | CTD or STD cast | 2015-12-26 04:58:19 | 24.4994 N, 64.7511 W | RRS Discovery DY040 |
| 1895507 | Water sample data | 2015-12-26 06:40:00 | 24.49944 N, 64.75113 W | RRS Discovery DY040 |
| 1842943 | CTD or STD cast | 2015-12-26 14:53:09 | 24.4994 N, 64.0166 W | RRS Discovery DY040 |
| 1895519 | Water sample data | 2015-12-26 16:37:00 | 24.49939 N, 64.0166 W | RRS Discovery DY040 |
| 1842955 | CTD or STD cast | 2015-12-27 00:00:24 | 24.5023 N, 63.2847 W | RRS Discovery DY040 |
| 1895520 | Water sample data | 2015-12-27 01:43:00 | 24.50234 N, 63.28468 W | RRS Discovery DY040 |
| 1842967 | CTD or STD cast | 2015-12-27 09:07:59 | 24.503 N, 62.5543 W | RRS Discovery DY040 |
| 1895532 | Water sample data | 2015-12-27 10:49:00 | 24.50299 N, 62.5543 W | RRS Discovery DY040 |
| 1842979 | CTD or STD cast | 2015-12-27 18:06:49 | 24.4997 N, 61.8174 W | RRS Discovery DY040 |
| 1895544 | Water sample data | 2015-12-27 19:48:00 | 24.4997 N, 61.8174 W | RRS Discovery DY040 |
| 1842980 | CTD or STD cast | 2015-12-28 03:04:01 | 24.5004 N, 61.0834 W | RRS Discovery DY040 |
| 1895556 | Water sample data | 2015-12-28 04:43:00 | 24.50036 N, 61.08344 W | RRS Discovery DY040 |
| 1842992 | CTD or STD cast | 2015-12-28 11:39:32 | 24.4992 N, 60.3509 W | RRS Discovery DY040 |
| 1895568 | Water sample data | 2015-12-28 13:24:00 | 24.49924 N, 60.3509 W | RRS Discovery DY040 |
| 1843006 | CTD or STD cast | 2015-12-28 20:11:09 | 24.5002 N, 59.6163 W | RRS Discovery DY040 |
| 1895581 | Water sample data | 2015-12-28 21:56:00 | 24.50015 N, 59.61628 W | RRS Discovery DY040 |
| 1843018 | CTD or STD cast | 2015-12-29 04:28:19 | 24.4995 N, 58.8832 W | RRS Discovery DY040 |
| 1895593 | Water sample data | 2015-12-29 06:07:00 | 24.49949 N, 58.88324 W | RRS Discovery DY040 |
| 1843031 | CTD or STD cast | 2015-12-29 12:46:35 | 24.5 N, 58.1505 W | RRS Discovery DY040 |
| 1895600 | Water sample data | 2015-12-29 14:32:00 | 24.50002 N, 58.15049 W | RRS Discovery DY040 |
| 1843043 | CTD or STD cast | 2015-12-29 21:13:25 | 24.5021 N, 57.4169 W | RRS Discovery DY040 |
| 1895612 | Water sample data | 2015-12-29 23:01:00 | 24.50206 N, 57.41692 W | RRS Discovery DY040 |
| 1843055 | CTD or STD cast | 2015-12-30 05:26:36 | 24.5 N, 56.6834 W | RRS Discovery DY040 |
| 1895624 | Water sample data | 2015-12-30 07:14:00 | 24.5 N, 56.68337 W | RRS Discovery DY040 |
| 1843067 | CTD or STD cast | 2015-12-30 14:03:40 | 24.5 N, 55.9505 W | RRS Discovery DY040 |
| 1895636 | Water sample data | 2015-12-30 15:54:00 | 24.49998 N, 55.95053 W | RRS Discovery DY040 |
| 1843079 | CTD or STD cast | 2015-12-30 22:25:32 | 24.5003 N, 55.2185 W | RRS Discovery DY040 |
| 1895648 | Water sample data | 2015-12-31 00:21:00 | 24.50027 N, 55.21845 W | RRS Discovery DY040 |
| 1843080 | CTD or STD cast | 2015-12-31 06:43:58 | 24.5001 N, 54.4831 W | RRS Discovery DY040 |
| 1895661 | Water sample data | 2015-12-31 08:11:00 | 24.50013 N, 54.4831 W | RRS Discovery DY040 |
| 1843092 | CTD or STD cast | 2015-12-31 14:46:59 | 24.4996 N, 53.751 W | RRS Discovery DY040 |
| 1895673 | Water sample data | 2015-12-31 16:30:00 | 24.49957 N, 53.75104 W | RRS Discovery DY040 |
| 1843111 | CTD or STD cast | 2015-12-31 23:03:24 | 24.5006 N, 53.0179 W | RRS Discovery DY040 |
| 1895685 | Water sample data | 2016-01-01 00:40:00 | 24.50058 N, 53.01792 W | RRS Discovery DY040 |
| 1843123 | CTD or STD cast | 2016-01-01 07:00:37 | 24.5 N, 52.2839 W | RRS Discovery DY040 |
| 1895697 | Water sample data | 2016-01-01 08:40:00 | 24.49995 N, 52.28386 W | RRS Discovery DY040 |
| 1843135 | CTD or STD cast | 2016-01-01 15:06:23 | 24.5001 N, 51.5502 W | RRS Discovery DY040 |
| 1895704 | Water sample data | 2016-01-01 16:41:00 | 24.50015 N, 51.55017 W | RRS Discovery DY040 |
| 1843147 | CTD or STD cast | 2016-01-01 22:53:23 | 24.4996 N, 50.8158 W | RRS Discovery DY040 |
| 1895716 | Water sample data | 2016-01-02 00:28:00 | 24.49963 N, 50.81579 W | RRS Discovery DY040 |
| 1843159 | CTD or STD cast | 2016-01-02 06:37:51 | 24.5005 N, 50.0834 W | RRS Discovery DY040 |
| 1895728 | Water sample data | 2016-01-02 08:02:00 | 24.50051 N, 50.08341 W | RRS Discovery DY040 |
| 1843160 | CTD or STD cast | 2016-01-02 14:15:36 | 24.5004 N, 49.35 W | RRS Discovery DY040 |
| 1895741 | Water sample data | 2016-01-02 15:55:00 | 24.50039 N, 49.34996 W | RRS Discovery DY040 |
| 1843172 | CTD or STD cast | 2016-01-02 23:56:14 | 24.4991 N, 48.6174 W | RRS Discovery DY040 |
| 1895753 | Water sample data | 2016-01-03 01:06:00 | 24.49911 N, 48.61735 W | RRS Discovery DY040 |
| 1843184 | CTD or STD cast | 2016-01-03 07:14:28 | 24.5005 N, 47.8833 W | RRS Discovery DY040 |
| 1895765 | Water sample data | 2016-01-03 08:25:00 | 24.50049 N, 47.88333 W | RRS Discovery DY040 |
| 1843196 | CTD or STD cast | 2016-01-03 14:25:42 | 24.4992 N, 47.1503 W | RRS Discovery DY040 |
| 1895777 | Water sample data | 2016-01-03 15:35:00 | 24.49925 N, 47.15029 W | RRS Discovery DY040 |
| 1843203 | CTD or STD cast | 2016-01-03 20:52:59 | 24.4999 N, 46.5003 W | RRS Discovery DY040 |
| 1895789 | Water sample data | 2016-01-03 21:59:00 | 24.49989 N, 46.50032 W | RRS Discovery DY040 |
| 1843215 | CTD or STD cast | 2016-01-04 03:17:41 | 24.5004 N, 45.8509 W | RRS Discovery DY040 |
| 1895790 | Water sample data | 2016-01-04 04:14:00 | 24.5004 N, 45.85088 W | RRS Discovery DY040 |
| 1843227 | CTD or STD cast | 2016-01-04 09:13:58 | 24.4992 N, 45.1999 W | RRS Discovery DY040 |
| 1895808 | Water sample data | 2016-01-04 10:17:00 | 24.49925 N, 45.19992 W | RRS Discovery DY040 |
| 1843239 | CTD or STD cast | 2016-01-04 15:54:52 | 24.5003 N, 44.551 W | RRS Discovery DY040 |
| 1895821 | Water sample data | 2016-01-04 17:07:00 | 24.50032 N, 44.55096 W | RRS Discovery DY040 |
| 1843240 | CTD or STD cast | 2016-01-04 22:38:23 | 24.5 N, 43.9015 W | RRS Discovery DY040 |
| 1895833 | Water sample data | 2016-01-04 23:51:00 | 24.49998 N, 43.90148 W | RRS Discovery DY040 |
| 1843252 | CTD or STD cast | 2016-01-05 05:10:34 | 24.5001 N, 43.251 W | RRS Discovery DY040 |
| 1895845 | Water sample data | 2016-01-05 06:14:00 | 24.5001 N, 43.25099 W | RRS Discovery DY040 |
| 1843264 | CTD or STD cast | 2016-01-05 12:03:09 | 24.5002 N, 42.6004 W | RRS Discovery DY040 |
| 1895857 | Water sample data | 2016-01-05 13:22:00 | 24.50019 N, 42.60044 W | RRS Discovery DY040 |
| 1843276 | CTD or STD cast | 2016-01-05 19:19:18 | 24.4989 N, 41.9512 W | RRS Discovery DY040 |
| 1895869 | Water sample data | 2016-01-05 20:34:00 | 24.49891 N, 41.95117 W | RRS Discovery DY040 |
| 1843288 | CTD or STD cast | 2016-01-06 02:25:18 | 24.5 N, 41.3005 W | RRS Discovery DY040 |
| 1895870 | Water sample data | 2016-01-06 03:49:00 | 24.50001 N, 41.30048 W | RRS Discovery DY040 |
| 1843307 | CTD or STD cast | 2016-01-06 09:29:19 | 24.4995 N, 40.6491 W | RRS Discovery DY040 |
| 1895882 | Water sample data | 2016-01-06 11:01:00 | 24.49952 N, 40.64905 W | RRS Discovery DY040 |
| 1843319 | CTD or STD cast | 2016-01-06 16:50:45 | 24.4995 N, 40.0008 W | RRS Discovery DY040 |
| 1895894 | Water sample data | 2016-01-06 18:30:00 | 24.49953 N, 40.00082 W | RRS Discovery DY040 |
| 1843320 | CTD or STD cast | 2016-01-07 00:31:26 | 24.5007 N, 39.3502 W | RRS Discovery DY040 |
| 1895901 | Water sample data | 2016-01-07 02:02:00 | 24.50065 N, 39.35024 W | RRS Discovery DY040 |
| 1843332 | CTD or STD cast | 2016-01-07 07:34:52 | 24.5022 N, 38.6992 W | RRS Discovery DY040 |
| 1895913 | Water sample data | 2016-01-07 08:59:00 | 24.50221 N, 38.69916 W | RRS Discovery DY040 |
| 1843344 | CTD or STD cast | 2016-01-07 14:31:36 | 24.4992 N, 38.0671 W | RRS Discovery DY040 |
| 1895925 | Water sample data | 2016-01-07 16:10:00 | 24.49918 N, 38.06709 W | RRS Discovery DY040 |
| 1843356 | CTD or STD cast | 2016-01-07 21:39:49 | 24.5015 N, 37.4338 W | RRS Discovery DY040 |
| 1895937 | Water sample data | 2016-01-07 23:29:00 | 24.50153 N, 37.43381 W | RRS Discovery DY040 |
| 1843368 | CTD or STD cast | 2016-01-08 05:09:35 | 24.4996 N, 36.8003 W | RRS Discovery DY040 |
| 1895949 | Water sample data | 2016-01-08 06:58:00 | 24.49959 N, 36.80033 W | RRS Discovery DY040 |
| 1843381 | CTD or STD cast | 2016-01-08 12:54:51 | 24.4999 N, 36.1674 W | RRS Discovery DY040 |
| 1895950 | Water sample data | 2016-01-08 14:38:00 | 24.49994 N, 36.16738 W | RRS Discovery DY040 |
| 1843393 | CTD or STD cast | 2016-01-08 20:22:58 | 24.5024 N, 35.5341 W | RRS Discovery DY040 |
| 1895962 | Water sample data | 2016-01-08 22:03:00 | 24.50236 N, 35.5341 W | RRS Discovery DY040 |
| 1843400 | CTD or STD cast | 2016-01-09 03:31:59 | 24.4997 N, 34.8998 W | RRS Discovery DY040 |
| 1895974 | Water sample data | 2016-01-09 05:21:00 | 24.4997 N, 34.89983 W | RRS Discovery DY040 |
| 1843412 | CTD or STD cast | 2016-01-09 11:29:56 | 24.5 N, 34.2668 W | RRS Discovery DY040 |
| 1895986 | Water sample data | 2016-01-09 13:15:00 | 24.50004 N, 34.26684 W | RRS Discovery DY040 |
| 1843424 | CTD or STD cast | 2016-01-09 19:07:42 | 24.5017 N, 33.6359 W | RRS Discovery DY040 |
| 1895998 | Water sample data | 2016-01-09 20:51:00 | 24.50173 N, 33.63592 W | RRS Discovery DY040 |
| 1843436 | CTD or STD cast | 2016-01-10 02:48:42 | 24.5003 N, 33.0 W | RRS Discovery DY040 |
| 1896001 | Water sample data | 2016-01-10 04:32:00 | 24.5003 N, 33.0 W | RRS Discovery DY040 |
| 1843448 | CTD or STD cast | 2016-01-10 10:32:56 | 24.5008 N, 32.3659 W | RRS Discovery DY040 |
| 1896013 | Water sample data | 2016-01-10 12:14:00 | 24.50082 N, 32.36592 W | RRS Discovery DY040 |
| 1843461 | CTD or STD cast | 2016-01-10 17:59:44 | 24.5006 N, 31.7335 W | RRS Discovery DY040 |
| 1896025 | Water sample data | 2016-01-10 19:51:00 | 24.50056 N, 31.7335 W | RRS Discovery DY040 |
| 1843473 | CTD or STD cast | 2016-01-11 01:45:47 | 24.5002 N, 31.0998 W | RRS Discovery DY040 |
| 1896037 | Water sample data | 2016-01-11 03:27:00 | 24.5002 N, 31.09981 W | RRS Discovery DY040 |
| 1843485 | CTD or STD cast | 2016-01-11 08:58:24 | 24.4989 N, 30.4675 W | RRS Discovery DY040 |
| 1896049 | Water sample data | 2016-01-11 10:43:00 | 24.49885 N, 30.46751 W | RRS Discovery DY040 |
| 1843497 | CTD or STD cast | 2016-01-11 16:36:18 | 24.5002 N, 29.8335 W | RRS Discovery DY040 |
| 1896050 | Water sample data | 2016-01-11 18:12:00 | 24.50024 N, 29.83353 W | RRS Discovery DY040 |
| 1843504 | CTD or STD cast | 2016-01-11 23:59:25 | 24.5 N, 29.1999 W | RRS Discovery DY040 |
| 1896062 | Water sample data | 2016-01-12 01:44:00 | 24.50004 N, 29.19988 W | RRS Discovery DY040 |
| 1843516 | CTD or STD cast | 2016-01-12 07:29:36 | 24.5001 N, 28.5684 W | RRS Discovery DY040 |
| 1843528 | CTD or STD cast | 2016-01-12 15:30:33 | 24.4997 N, 27.9335 W | RRS Discovery DY040 |
| 1843541 | CTD or STD cast | 2016-01-14 08:55:59 | 24.5028 N, 27.214 W | RRS Discovery DY040 |
| 1843553 | CTD or STD cast | 2016-01-14 17:09:27 | 24.5003 N, 26.4748 W | RRS Discovery DY040 |
| 1843565 | CTD or STD cast | 2016-01-15 01:11:14 | 24.5007 N, 25.7332 W | RRS Discovery DY040 |
| 1843577 | CTD or STD cast | 2016-01-15 06:52:34 | 24.4985 N, 25.3573 W | RRS Discovery DY040 |
| 1843589 | CTD or STD cast | 2016-01-15 12:26:59 | 24.4998 N, 24.9919 W | RRS Discovery DY040 |
| 1843590 | CTD or STD cast | 2016-01-15 20:13:44 | 24.4983 N, 24.2501 W | RRS Discovery DY040 |
| 1843608 | CTD or STD cast | 2016-01-16 04:06:04 | 24.4998 N, 23.5003 W | RRS Discovery DY040 |
| 1843621 | CTD or STD cast | 2016-01-16 11:40:39 | 24.7082 N, 22.8835 W | RRS Discovery DY040 |
| 1843633 | CTD or STD cast | 2016-01-16 18:48:00 | 24.9169 N, 22.2672 W | RRS Discovery DY040 |
| 1843645 | CTD or STD cast | 2016-01-17 02:06:48 | 25.1261 N, 21.6498 W | RRS Discovery DY040 |
| 1843657 | CTD or STD cast | 2016-01-17 08:59:13 | 25.3344 N, 21.0338 W | RRS Discovery DY040 |
| 1843669 | CTD or STD cast | 2016-01-17 16:01:12 | 25.5426 N, 20.4175 W | RRS Discovery DY040 |
| 1843670 | CTD or STD cast | 2016-01-17 22:55:38 | 25.7513 N, 19.8005 W | RRS Discovery DY040 |
| 1843682 | CTD or STD cast | 2016-01-18 05:24:03 | 25.9609 N, 19.1836 W | RRS Discovery DY040 |
| 1843694 | CTD or STD cast | 2016-01-18 11:54:57 | 26.168 N, 18.5669 W | RRS Discovery DY040 |
| 1843701 | CTD or STD cast | 2016-01-18 18:21:09 | 26.3783 N, 17.9508 W | RRS Discovery DY040 |
| 1843713 | CTD or STD cast | 2016-01-19 00:54:42 | 26.5855 N, 17.3335 W | RRS Discovery DY040 |
| 1843725 | CTD or STD cast | 2016-01-19 07:14:47 | 26.7954 N, 16.7178 W | RRS Discovery DY040 |
| 1843737 | CTD or STD cast | 2016-01-19 13:59:23 | 27.0026 N, 16.1008 W | RRS Discovery DY040 |
| 1843749 | CTD or STD cast | 2016-01-19 21:43:47 | 27.2109 N, 15.4835 W | RRS Discovery DY040 |
| 1843750 | CTD or STD cast | 2016-01-20 03:50:14 | 27.42 N, 14.8689 W | RRS Discovery DY040 |
| 1843762 | CTD or STD cast | 2016-01-20 09:59:26 | 27.6291 N, 14.2511 W | RRS Discovery DY040 |
| 1843774 | CTD or STD cast | 2016-01-20 14:45:31 | 27.7856 N, 13.7843 W | RRS Discovery DY040 |
| 1843786 | CTD or STD cast | 2016-01-20 17:33:05 | 27.8653 N, 13.5508 W | RRS Discovery DY040 |
| 1843798 | CTD or STD cast | 2016-01-20 19:47:02 | 27.9133 N, 13.4086 W | RRS Discovery DY040 |
| 1843805 | CTD or STD cast | 2016-01-20 21:27:09 | 27.9267 N, 13.3671 W | RRS Discovery DY040 |
| 1896086 | Water sample data | 2016-01-12 17:14:00 | 24.49965 N, 27.93349 W | RRS Discovery DY040 |
| 1896098 | Water sample data | 2016-01-14 10:34:00 | 24.50282 N, 27.21398 W | RRS Discovery DY040 |
| 1896105 | Water sample data | 2016-01-14 18:47:00 | 24.50033 N, 26.47485 W | RRS Discovery DY040 |
| 1896117 | Water sample data | 2016-01-15 02:45:00 | 24.50074 N, 25.73321 W | RRS Discovery DY040 |
| 1896129 | Water sample data | 2016-01-15 14:02:00 | 24.49976 N, 24.99189 W | RRS Discovery DY040 |
| 1896130 | Water sample data | 2016-01-15 21:46:00 | 24.49831 N, 24.25008 W | RRS Discovery DY040 |
| 1896142 | Water sample data | 2016-01-16 05:46:00 | 24.4998 N, 23.5003 W | RRS Discovery DY040 |
| 1896154 | Water sample data | 2016-01-16 13:09:00 | 24.70819 N, 22.88352 W | RRS Discovery DY040 |
| 1896166 | Water sample data | 2016-01-16 20:18:00 | 24.91691 N, 22.26717 W | RRS Discovery DY040 |
| 1896178 | Water sample data | 2016-01-17 03:29:00 | 25.12609 N, 21.64978 W | RRS Discovery DY040 |
| 1896191 | Water sample data | 2016-01-17 10:22:00 | 25.33439 N, 21.03379 W | RRS Discovery DY040 |
| 1896209 | Water sample data | 2016-01-17 17:18:00 | 25.54257 N, 20.41748 W | RRS Discovery DY040 |
| 1896210 | Water sample data | 2016-01-18 00:05:00 | 25.75129 N, 19.80046 W | RRS Discovery DY040 |
| 1896222 | Water sample data | 2016-01-18 06:31:00 | 25.96091 N, 19.18355 W | RRS Discovery DY040 |
| 1896234 | Water sample data | 2016-01-18 12:57:00 | 26.16805 N, 18.56688 W | RRS Discovery DY040 |
| 1896246 | Water sample data | 2016-01-18 19:29:00 | 26.37832 N, 17.95081 W | RRS Discovery DY040 |
| 1896258 | Water sample data | 2016-01-19 01:59:00 | 26.58552 N, 17.33351 W | RRS Discovery DY040 |
| 1896271 | Water sample data | 2016-01-19 08:27:00 | 26.79537 N, 16.7178 W | RRS Discovery DY040 |
| 1896283 | Water sample data | 2016-01-19 15:02:00 | 27.00256 N, 16.1008 W | RRS Discovery DY040 |
| 1896295 | Water sample data | 2016-01-19 22:39:00 | 27.21087 N, 15.48352 W | RRS Discovery DY040 |
| 1896302 | Water sample data | 2016-01-20 04:39:00 | 27.41999 N, 14.86894 W | RRS Discovery DY040 |
| 1896314 | Water sample data | 2016-01-20 10:40:00 | 27.62906 N, 14.25112 W | RRS Discovery DY040 |
| 1896326 | Water sample data | 2016-01-20 15:15:00 | 27.78556 N, 13.78429 W | RRS Discovery DY040 |
| 1896338 | Water sample data | 2016-01-20 17:58:00 | 27.86528 N, 13.55085 W | RRS Discovery DY040 |
| 1896351 | Water sample data | 2016-01-20 20:05:00 | 27.91334 N, 13.40859 W | RRS Discovery DY040 |
| 1896363 | Water sample data | 2016-01-20 21:38:00 | 27.92669 N, 13.36707 W | RRS Discovery DY040 |
| 2026483 | Currents -subsurface Eulerian | 2020-01-19 19:25:56 | 26.50885 N, 78.82784 W | RRS James Cook JC191 |
| 2026495 | Currents -subsurface Eulerian | 2020-01-19 19:25:57 | 26.50886 N, 78.82783 W | RRS James Cook JC191 |
| 2023995 | CTD or STD cast | 2020-01-20 00:01:12 | 26.4335 N, 78.667 W | RRS James Cook JC191 |
| 2204938 | Currents -subsurface Eulerian | 2020-01-20 00:01:12 | 26.43346 N, 78.66696 W | RRS James Cook JC191 |
| 2025455 | CTD or STD cast | 2020-01-20 14:18:18 | 26.9997 N, 80.0011 W | RRS James Cook JC191 |
| 2290125 | Water sample data | 2020-01-20 14:18:18 | 26.9997 N, 80.0011 W | RRS James Cook JC191 |
| 2024009 | CTD or STD cast | 2020-01-20 15:44:53 | 27.0055 N, 79.9883 W | RRS James Cook JC191 |
| 2290137 | Water sample data | 2020-01-20 15:44:53 | 27.0055 N, 79.9883 W | RRS James Cook JC191 |
| 2024010 | CTD or STD cast | 2020-01-20 18:14:38 | 27.0125 N, 79.9326 W | RRS James Cook JC191 |
| 2290149 | Water sample data | 2020-01-20 18:14:38 | 27.0125 N, 79.9326 W | RRS James Cook JC191 |
| 2024022 | CTD or STD cast | 2020-01-20 21:12:54 | 27.0145 N, 79.8662 W | RRS James Cook JC191 |
| 2203554 | Currents -subsurface Eulerian | 2020-01-20 21:12:54 | 27.01583 N, 79.8662 W | RRS James Cook JC191 |
| 2290150 | Water sample data | 2020-01-20 21:12:54 | 27.0145 N, 79.8662 W | RRS James Cook JC191 |
| 2024034 | CTD or STD cast | 2020-01-21 00:17:06 | 27.0138 N, 79.7836 W | RRS James Cook JC191 |
| 2203566 | Currents -subsurface Eulerian | 2020-01-21 00:17:06 | 27.01725 N, 79.78354 W | RRS James Cook JC191 |
| 2290162 | Water sample data | 2020-01-21 00:17:06 | 27.0138 N, 79.7836 W | RRS James Cook JC191 |
| 2024046 | CTD or STD cast | 2020-01-21 03:35:37 | 27.0164 N, 79.6838 W | RRS James Cook JC191 |
| 2203578 | Currents -subsurface Eulerian | 2020-01-21 03:35:37 | 27.01959 N, 79.68375 W | RRS James Cook JC191 |
| 2290174 | Water sample data | 2020-01-21 03:35:37 | 27.0164 N, 79.6838 W | RRS James Cook JC191 |
| 2024058 | CTD or STD cast | 2020-01-21 06:30:48 | 27.0137 N, 79.6168 W | RRS James Cook JC191 |
| 2203591 | Currents -subsurface Eulerian | 2020-01-21 06:30:48 | 27.01509 N, 79.61686 W | RRS James Cook JC191 |
| 2290186 | Water sample data | 2020-01-21 06:30:48 | 27.0137 N, 79.6168 W | RRS James Cook JC191 |
| 2024071 | CTD or STD cast | 2020-01-21 09:42:16 | 27.0084 N, 79.4992 W | RRS James Cook JC191 |
| 2203609 | Currents -subsurface Eulerian | 2020-01-21 09:42:16 | 27.00911 N, 79.49924 W | RRS James Cook JC191 |
| 2290198 | Water sample data | 2020-01-21 09:42:16 | 27.0084 N, 79.4992 W | RRS James Cook JC191 |
| 2024083 | CTD or STD cast | 2020-01-21 12:34:59 | 27.0053 N, 79.3655 W | RRS James Cook JC191 |
| 2203610 | Currents -subsurface Eulerian | 2020-01-21 12:34:59 | 27.00612 N, 79.36547 W | RRS James Cook JC191 |
| 2290205 | Water sample data | 2020-01-21 12:34:59 | 27.0053 N, 79.3655 W | RRS James Cook JC191 |
| 2024095 | CTD or STD cast | 2020-01-21 15:28:50 | 27.0036 N, 79.2843 W | RRS James Cook JC191 |
| 2203622 | Currents -subsurface Eulerian | 2020-01-21 15:28:50 | 27.00495 N, 79.28433 W | RRS James Cook JC191 |
| 2290217 | Water sample data | 2020-01-21 15:28:50 | 27.0036 N, 79.2843 W | RRS James Cook JC191 |
| 2024102 | CTD or STD cast | 2020-01-21 17:57:47 | 27.0016 N, 79.2007 W | RRS James Cook JC191 |
| 2203634 | Currents -subsurface Eulerian | 2020-01-21 17:57:47 | 27.00251 N, 79.20072 W | RRS James Cook JC191 |
| 2290229 | Water sample data | 2020-01-21 17:57:47 | 27.0016 N, 79.2007 W | RRS James Cook JC191 |
| 2024114 | CTD or STD cast | 2020-01-21 20:44:22 | 27.0011 N, 79.1691 W | RRS James Cook JC191 |
| 2203646 | Currents -subsurface Eulerian | 2020-01-21 20:44:22 | 27.00168 N, 79.16967 W | RRS James Cook JC191 |
| 2290230 | Water sample data | 2020-01-21 20:44:22 | 27.0011 N, 79.1691 W | RRS James Cook JC191 |
| 2024126 | CTD or STD cast | 2020-01-22 23:48:14 | 26.5007 N, 76.9314 W | RRS James Cook JC191 |
| 2203658 | Currents -subsurface Eulerian | 2020-01-22 23:48:14 | 26.50071 N, 76.93138 W | RRS James Cook JC191 |
| 2290242 | Water sample data | 2020-01-22 23:48:14 | 26.5007 N, 76.9314 W | RRS James Cook JC191 |
| 2024138 | CTD or STD cast | 2020-01-23 02:53:07 | 26.4996 N, 76.8658 W | RRS James Cook JC191 |
| 2203671 | Currents -subsurface Eulerian | 2020-01-23 02:53:07 | 26.49962 N, 76.8658 W | RRS James Cook JC191 |
| 2290254 | Water sample data | 2020-01-23 02:53:07 | 26.4996 N, 76.8658 W | RRS James Cook JC191 |
| 2024151 | CTD or STD cast | 2020-01-23 05:37:19 | 26.516 N, 76.8254 W | RRS James Cook JC191 |
| 2203683 | Currents -subsurface Eulerian | 2020-01-23 05:37:19 | 26.51601 N, 76.82538 W | RRS James Cook JC191 |
| 2024163 | CTD or STD cast | 2020-01-23 08:48:32 | 26.4981 N, 76.8012 W | RRS James Cook JC191 |
| 2203695 | Currents -subsurface Eulerian | 2020-01-23 08:48:32 | 26.49813 N, 76.80121 W | RRS James Cook JC191 |
| 2290266 | Water sample data | 2020-01-23 08:48:32 | 26.4981 N, 76.8012 W | RRS James Cook JC191 |
| 2024175 | CTD or STD cast | 2020-01-23 12:09:24 | 26.4993 N, 76.7838 W | RRS James Cook JC191 |
| 2203702 | Currents -subsurface Eulerian | 2020-01-23 12:09:24 | 26.4993 N, 76.78379 W | RRS James Cook JC191 |
| 2290278 | Water sample data | 2020-01-23 12:09:24 | 26.4993 N, 76.7838 W | RRS James Cook JC191 |
| 2024187 | CTD or STD cast | 2020-01-23 16:42:37 | 26.4971 N, 76.7617 W | RRS James Cook JC191 |
| 2203714 | Currents -subsurface Eulerian | 2020-01-23 16:42:37 | 26.49599 N, 76.76321 W | RRS James Cook JC191 |
| 2290291 | Water sample data | 2020-01-23 16:42:37 | 26.4971 N, 76.7617 W | RRS James Cook JC191 |
| 2024199 | CTD or STD cast | 2020-01-23 22:13:20 | 26.4963 N, 76.6894 W | RRS James Cook JC191 |
| 2203726 | Currents -subsurface Eulerian | 2020-01-23 22:13:20 | 26.49708 N, 76.68819 W | RRS James Cook JC191 |
| 2290309 | Water sample data | 2020-01-23 22:13:20 | 26.4963 N, 76.6894 W | RRS James Cook JC191 |
| 2024206 | CTD or STD cast | 2020-01-24 02:57:58 | 26.496 N, 76.6896 W | RRS James Cook JC191 |
| 2203738 | Currents -subsurface Eulerian | 2020-01-24 02:57:58 | 26.49612 N, 76.68951 W | RRS James Cook JC191 |
| 2024218 | CTD or STD cast | 2020-01-24 07:20:49 | 26.4981 N, 76.6209 W | RRS James Cook JC191 |
| 2203751 | Currents -subsurface Eulerian | 2020-01-24 07:20:49 | 26.49741 N, 76.62218 W | RRS James Cook JC191 |
| 2290310 | Water sample data | 2020-01-24 07:20:49 | 26.4981 N, 76.6209 W | RRS James Cook JC191 |
| 2024231 | CTD or STD cast | 2020-01-24 12:29:31 | 26.5005 N, 76.5339 W | RRS James Cook JC191 |
| 2203763 | Currents -subsurface Eulerian | 2020-01-24 12:29:31 | 26.4986 N, 76.5394 W | RRS James Cook JC191 |
| 2290322 | Water sample data | 2020-01-24 12:29:31 | 26.5005 N, 76.5339 W | RRS James Cook JC191 |
| 2024243 | CTD or STD cast | 2020-01-24 17:50:33 | 26.4966 N, 76.4409 W | RRS James Cook JC191 |
| 2203775 | Currents -subsurface Eulerian | 2020-01-24 17:50:33 | 26.49845 N, 76.43779 W | RRS James Cook JC191 |
| 2290334 | Water sample data | 2020-01-24 17:50:33 | 26.4966 N, 76.4409 W | RRS James Cook JC191 |
| 2024255 | CTD or STD cast | 2020-01-24 23:31:56 | 26.4993 N, 76.3003 W | RRS James Cook JC191 |
| 2203787 | Currents -subsurface Eulerian | 2020-01-24 23:31:56 | 26.49873 N, 76.30161 W | RRS James Cook JC191 |
| 2290346 | Water sample data | 2020-01-24 23:31:56 | 26.4993 N, 76.3003 W | RRS James Cook JC191 |
| 2024267 | CTD or STD cast | 2020-01-25 04:36:12 | 26.4972 N, 76.2271 W | RRS James Cook JC191 |
| 2203799 | Currents -subsurface Eulerian | 2020-01-25 04:36:12 | 26.49743 N, 76.22669 W | RRS James Cook JC191 |
| 2290358 | Water sample data | 2020-01-25 04:36:12 | 26.4972 N, 76.2271 W | RRS James Cook JC191 |
| 2024279 | CTD or STD cast | 2020-01-25 08:00:50 | 26.5001 N, 76.1506 W | RRS James Cook JC191 |
| 2024280 | CTD or STD cast | 2020-01-25 10:44:28 | 26.4994 N, 76.1015 W | RRS James Cook JC191 |
| 2203806 | Currents -subsurface Eulerian | 2020-01-25 10:44:28 | 26.49833 N, 76.10302 W | RRS James Cook JC191 |
| 2290371 | Water sample data | 2020-01-25 10:44:28 | 26.4994 N, 76.1015 W | RRS James Cook JC191 |
| 2024292 | CTD or STD cast | 2020-01-25 15:48:42 | 26.4899 N, 75.9112 W | RRS James Cook JC191 |
| 2203818 | Currents -subsurface Eulerian | 2020-01-25 15:48:42 | 26.4908 N, 75.91096 W | RRS James Cook JC191 |
| 2290383 | Water sample data | 2020-01-25 15:48:42 | 26.4899 N, 75.9112 W | RRS James Cook JC191 |
| 2024311 | CTD or STD cast | 2020-01-25 21:14:56 | 26.4966 N, 75.7093 W | RRS James Cook JC191 |
| 2203831 | Currents -subsurface Eulerian | 2020-01-25 21:14:56 | 26.49725 N, 75.70822 W | RRS James Cook JC191 |
| 2290395 | Water sample data | 2020-01-25 21:14:56 | 26.4966 N, 75.7093 W | RRS James Cook JC191 |
| 2024323 | CTD or STD cast | 2020-01-26 02:14:20 | 26.4967 N, 75.5065 W | RRS James Cook JC191 |
| 2203843 | Currents -subsurface Eulerian | 2020-01-26 02:14:20 | 26.49652 N, 75.50689 W | RRS James Cook JC191 |
| 2290402 | Water sample data | 2020-01-26 02:14:20 | 26.4967 N, 75.5065 W | RRS James Cook JC191 |
| 2024335 | CTD or STD cast | 2020-01-26 07:09:29 | 26.496 N, 75.3066 W | RRS James Cook JC191 |
| 2203855 | Currents -subsurface Eulerian | 2020-01-26 07:09:29 | 26.49594 N, 75.30668 W | RRS James Cook JC191 |
| 2290414 | Water sample data | 2020-01-26 07:09:29 | 26.496 N, 75.3066 W | RRS James Cook JC191 |
| 2024347 | CTD or STD cast | 2020-01-26 12:18:27 | 26.5 N, 75.0668 W | RRS James Cook JC191 |
| 2203867 | Currents -subsurface Eulerian | 2020-01-26 12:18:27 | 26.50005 N, 75.06681 W | RRS James Cook JC191 |
| 2290426 | Water sample data | 2020-01-26 12:18:27 | 26.5 N, 75.0668 W | RRS James Cook JC191 |
| 2024359 | CTD or STD cast | 2020-01-26 17:33:39 | 26.5007 N, 74.8011 W | RRS James Cook JC191 |
| 2203879 | Currents -subsurface Eulerian | 2020-01-26 17:33:39 | 26.50102 N, 74.80094 W | RRS James Cook JC191 |
| 2290438 | Water sample data | 2020-01-26 17:33:39 | 26.5007 N, 74.8011 W | RRS James Cook JC191 |
| 2024360 | CTD or STD cast | 2020-01-26 22:49:55 | 26.4997 N, 74.5173 W | RRS James Cook JC191 |
| 2203880 | Currents -subsurface Eulerian | 2020-01-26 22:49:55 | 26.49968 N, 74.51728 W | RRS James Cook JC191 |
| 2290451 | Water sample data | 2020-01-26 22:49:55 | 26.4997 N, 74.5173 W | RRS James Cook JC191 |
| 2024372 | CTD or STD cast | 2020-01-27 04:03:49 | 26.4991 N, 74.2357 W | RRS James Cook JC191 |
| 2203892 | Currents -subsurface Eulerian | 2020-01-27 04:03:49 | 26.49897 N, 74.23589 W | RRS James Cook JC191 |
| 2290463 | Water sample data | 2020-01-27 04:03:49 | 26.4991 N, 74.2357 W | RRS James Cook JC191 |
| 2024384 | CTD or STD cast | 2020-01-27 09:24:56 | 26.4999 N, 73.9334 W | RRS James Cook JC191 |
| 2203911 | Currents -subsurface Eulerian | 2020-01-27 09:24:56 | 26.49989 N, 73.93344 W | RRS James Cook JC191 |
| 2290475 | Water sample data | 2020-01-27 09:24:56 | 26.4999 N, 73.9334 W | RRS James Cook JC191 |
| 2024396 | CTD or STD cast | 2020-01-27 15:06:46 | 26.5009 N, 73.5669 W | RRS James Cook JC191 |
| 2203923 | Currents -subsurface Eulerian | 2020-01-27 15:06:46 | 26.50087 N, 73.56689 W | RRS James Cook JC191 |
| 2290487 | Water sample data | 2020-01-27 15:06:46 | 26.5009 N, 73.5669 W | RRS James Cook JC191 |
| 2024403 | CTD or STD cast | 2020-01-27 21:22:32 | 26.4996 N, 73.2007 W | RRS James Cook JC191 |
| 2203935 | Currents -subsurface Eulerian | 2020-01-27 21:22:32 | 26.49956 N, 73.20074 W | RRS James Cook JC191 |
| 2290499 | Water sample data | 2020-01-27 21:22:32 | 26.4996 N, 73.2007 W | RRS James Cook JC191 |
| 2024415 | CTD or STD cast | 2020-01-28 03:39:24 | 26.5008 N, 72.8393 W | RRS James Cook JC191 |
| 2203947 | Currents -subsurface Eulerian | 2020-01-28 03:39:24 | 26.50079 N, 72.83935 W | RRS James Cook JC191 |
| 2290506 | Water sample data | 2020-01-28 03:39:24 | 26.5008 N, 72.8393 W | RRS James Cook JC191 |
| 2024427 | CTD or STD cast | 2020-01-28 10:08:43 | 26.5018 N, 72.4674 W | RRS James Cook JC191 |
| 2203959 | Currents -subsurface Eulerian | 2020-01-28 10:08:43 | 26.50184 N, 72.46735 W | RRS James Cook JC191 |
| 2290518 | Water sample data | 2020-01-28 10:08:43 | 26.5018 N, 72.4674 W | RRS James Cook JC191 |
| 2024439 | CTD or STD cast | 2020-01-28 16:06:25 | 26.5002 N, 72.0995 W | RRS James Cook JC191 |
| 2203960 | Currents -subsurface Eulerian | 2020-01-28 16:06:25 | 26.50037 N, 72.09904 W | RRS James Cook JC191 |
| 2290531 | Water sample data | 2020-01-28 16:06:25 | 26.5002 N, 72.0995 W | RRS James Cook JC191 |
| 2024440 | CTD or STD cast | 2020-01-28 22:17:16 | 26.5002 N, 71.7319 W | RRS James Cook JC191 |
| 2203972 | Currents -subsurface Eulerian | 2020-01-28 22:17:16 | 26.50024 N, 71.73192 W | RRS James Cook JC191 |
| 2290543 | Water sample data | 2020-01-28 22:17:16 | 26.5002 N, 71.7319 W | RRS James Cook JC191 |
| 2024452 | CTD or STD cast | 2020-01-29 05:14:51 | 26.4973 N, 71.3679 W | RRS James Cook JC191 |
| 2203984 | Currents -subsurface Eulerian | 2020-01-29 05:14:51 | 26.49733 N, 71.3679 W | RRS James Cook JC191 |
| 2290555 | Water sample data | 2020-01-29 05:14:51 | 26.4973 N, 71.3679 W | RRS James Cook JC191 |
| 2024464 | CTD or STD cast | 2020-01-29 11:34:36 | 26.4962 N, 70.9985 W | RRS James Cook JC191 |
| 2203996 | Currents -subsurface Eulerian | 2020-01-29 11:34:36 | 26.49573 N, 70.99822 W | RRS James Cook JC191 |
| 2290567 | Water sample data | 2020-01-29 11:34:36 | 26.4962 N, 70.9985 W | RRS James Cook JC191 |
| 2024476 | CTD or STD cast | 2020-01-29 18:55:15 | 26.0998 N, 70.6332 W | RRS James Cook JC191 |
| 2204011 | Currents -subsurface Eulerian | 2020-01-29 18:55:15 | 26.09981 N, 70.6332 W | RRS James Cook JC191 |
| 2290579 | Water sample data | 2020-01-29 18:55:15 | 26.0998 N, 70.6332 W | RRS James Cook JC191 |
| 2024488 | CTD or STD cast | 2020-01-30 02:07:06 | 25.6957 N, 70.2649 W | RRS James Cook JC191 |
| 2204023 | Currents -subsurface Eulerian | 2020-01-30 02:07:06 | 25.69526 N, 70.26464 W | RRS James Cook JC191 |
| 2290580 | Water sample data | 2020-01-30 02:07:06 | 25.6957 N, 70.2649 W | RRS James Cook JC191 |
| 2024507 | CTD or STD cast | 2020-01-30 09:32:18 | 25.2999 N, 69.9 W | RRS James Cook JC191 |
| 2204035 | Currents -subsurface Eulerian | 2020-01-30 09:32:18 | 25.29986 N, 69.9 W | RRS James Cook JC191 |
| 2290592 | Water sample data | 2020-01-30 09:32:18 | 25.2999 N, 69.9 W | RRS James Cook JC191 |
| 2024519 | CTD or STD cast | 2020-01-30 16:59:34 | 24.8997 N, 69.5324 W | RRS James Cook JC191 |
| 2204047 | Currents -subsurface Eulerian | 2020-01-30 16:59:34 | 24.90004 N, 69.53267 W | RRS James Cook JC191 |
| 2290611 | Water sample data | 2020-01-30 16:59:34 | 24.8997 N, 69.5324 W | RRS James Cook JC191 |
| 2024520 | CTD or STD cast | 2020-01-31 00:27:41 | 24.5002 N, 69.1501 W | RRS James Cook JC191 |
| 2204059 | Currents -subsurface Eulerian | 2020-01-31 00:27:41 | 24.50018 N, 69.15015 W | RRS James Cook JC191 |
| 2290623 | Water sample data | 2020-01-31 00:27:41 | 24.5002 N, 69.1501 W | RRS James Cook JC191 |
| 2024532 | CTD or STD cast | 2020-01-31 08:46:46 | 24.5 N, 68.4148 W | RRS James Cook JC191 |
| 2204060 | Currents -subsurface Eulerian | 2020-01-31 08:46:46 | 24.4999 N, 68.41518 W | RRS James Cook JC191 |
| 2290635 | Water sample data | 2020-01-31 08:46:46 | 24.5 N, 68.4148 W | RRS James Cook JC191 |
| 2024544 | CTD or STD cast | 2020-01-31 17:23:47 | 24.5004 N, 67.6679 W | RRS James Cook JC191 |
| 2204072 | Currents -subsurface Eulerian | 2020-01-31 17:23:47 | 24.50036 N, 67.66786 W | RRS James Cook JC191 |
| 2290647 | Water sample data | 2020-01-31 17:23:47 | 24.5004 N, 67.6679 W | RRS James Cook JC191 |
| 2024556 | CTD or STD cast | 2020-02-01 02:09:34 | 24.4977 N, 66.937 W | RRS James Cook JC191 |
| 2204084 | Currents -subsurface Eulerian | 2020-02-01 02:09:34 | 24.49872 N, 66.93594 W | RRS James Cook JC191 |
| 2290659 | Water sample data | 2020-02-01 02:09:34 | 24.4977 N, 66.937 W | RRS James Cook JC191 |
| 2024568 | CTD or STD cast | 2020-02-01 10:51:04 | 24.5001 N, 66.1681 W | RRS James Cook JC191 |
| 2204096 | Currents -subsurface Eulerian | 2020-02-01 10:51:04 | 24.50016 N, 66.16806 W | RRS James Cook JC191 |
| 2290660 | Water sample data | 2020-02-01 10:51:04 | 24.5001 N, 66.1681 W | RRS James Cook JC191 |
| 2024581 | CTD or STD cast | 2020-02-01 18:59:41 | 24.4998 N, 65.4677 W | RRS James Cook JC191 |
| 2204103 | Currents -subsurface Eulerian | 2020-02-01 18:59:41 | 24.4998 N, 65.46772 W | RRS James Cook JC191 |
| 2290672 | Water sample data | 2020-02-01 18:59:41 | 24.4998 N, 65.4677 W | RRS James Cook JC191 |
| 2024593 | CTD or STD cast | 2020-02-02 03:19:19 | 24.4991 N, 64.7344 W | RRS James Cook JC191 |
| 2204115 | Currents -subsurface Eulerian | 2020-02-02 03:19:19 | 24.49905 N, 64.73436 W | RRS James Cook JC191 |
| 2290684 | Water sample data | 2020-02-02 03:19:19 | 24.4991 N, 64.7344 W | RRS James Cook JC191 |
| 2024600 | CTD or STD cast | 2020-02-02 11:42:07 | 24.5006 N, 63.9991 W | RRS James Cook JC191 |
| 2204127 | Currents -subsurface Eulerian | 2020-02-02 11:42:07 | 24.50115 N, 63.99855 W | RRS James Cook JC191 |
| 2290696 | Water sample data | 2020-02-02 11:42:07 | 24.5006 N, 63.9991 W | RRS James Cook JC191 |
| 2024612 | CTD or STD cast | 2020-02-02 20:03:01 | 24.5004 N, 63.2651 W | RRS James Cook JC191 |
| 2204139 | Currents -subsurface Eulerian | 2020-02-02 20:03:01 | 24.50081 N, 63.26458 W | RRS James Cook JC191 |
| 2290703 | Water sample data | 2020-02-02 20:03:01 | 24.5004 N, 63.2651 W | RRS James Cook JC191 |
| 2024624 | CTD or STD cast | 2020-02-03 04:33:43 | 24.4999 N, 62.5313 W | RRS James Cook JC191 |
| 2204140 | Currents -subsurface Eulerian | 2020-02-03 04:33:43 | 24.49999 N, 62.53127 W | RRS James Cook JC191 |
| 2290715 | Water sample data | 2020-02-03 04:33:43 | 24.4999 N, 62.5313 W | RRS James Cook JC191 |
| 2024636 | CTD or STD cast | 2020-02-03 13:06:52 | 24.5 N, 61.8006 W | RRS James Cook JC191 |
| 2204152 | Currents -subsurface Eulerian | 2020-02-03 13:06:52 | 24.49998 N, 61.80063 W | RRS James Cook JC191 |
| 2290727 | Water sample data | 2020-02-03 13:06:52 | 24.5 N, 61.8006 W | RRS James Cook JC191 |
| 2024648 | CTD or STD cast | 2020-02-03 21:34:05 | 24.4999 N, 61.0667 W | RRS James Cook JC191 |
| 2204164 | Currents -subsurface Eulerian | 2020-02-03 21:34:05 | 24.49988 N, 61.06666 W | RRS James Cook JC191 |
| 2290739 | Water sample data | 2020-02-03 21:34:05 | 24.4999 N, 61.0667 W | RRS James Cook JC191 |
| 2024661 | CTD or STD cast | 2020-02-04 06:13:38 | 24.4998 N, 60.3334 W | RRS James Cook JC191 |
| 2204176 | Currents -subsurface Eulerian | 2020-02-04 06:13:38 | 24.49976 N, 60.33342 W | RRS James Cook JC191 |
| 2290740 | Water sample data | 2020-02-04 06:13:38 | 24.4998 N, 60.3334 W | RRS James Cook JC191 |
| 2024673 | CTD or STD cast | 2020-02-04 14:48:01 | 24.5001 N, 59.6015 W | RRS James Cook JC191 |
| 2204188 | Currents -subsurface Eulerian | 2020-02-04 14:48:01 | 24.50012 N, 59.60153 W | RRS James Cook JC191 |
| 2290752 | Water sample data | 2020-02-04 14:48:01 | 24.5001 N, 59.6015 W | RRS James Cook JC191 |
| 2024685 | CTD or STD cast | 2020-02-04 23:30:35 | 24.5007 N, 58.8673 W | RRS James Cook JC191 |
| 2204207 | Currents -subsurface Eulerian | 2020-02-04 23:30:35 | 24.5007 N, 58.86727 W | RRS James Cook JC191 |
| 2290764 | Water sample data | 2020-02-04 23:30:35 | 24.5007 N, 58.8673 W | RRS James Cook JC191 |
| 2024697 | CTD or STD cast | 2020-02-05 08:17:31 | 24.4998 N, 58.1335 W | RRS James Cook JC191 |
| 2204219 | Currents -subsurface Eulerian | 2020-02-05 08:17:31 | 24.49983 N, 58.13348 W | RRS James Cook JC191 |
| 2290776 | Water sample data | 2020-02-05 08:17:31 | 24.4998 N, 58.1335 W | RRS James Cook JC191 |
| 2024704 | CTD or STD cast | 2020-02-05 17:27:37 | 24.4995 N, 57.3957 W | RRS James Cook JC191 |
| 2290788 | Water sample data | 2020-02-05 17:27:37 | 24.4995 N, 57.3957 W | RRS James Cook JC191 |
| 2024716 | CTD or STD cast | 2020-02-06 02:17:43 | 24.4992 N, 56.6679 W | RRS James Cook JC191 |
| 2290807 | Water sample data | 2020-02-06 02:17:43 | 24.4992 N, 56.6679 W | RRS James Cook JC191 |
| 2024728 | CTD or STD cast | 2020-02-06 11:12:04 | 24.5 N, 55.9501 W | RRS James Cook JC191 |
| 2290819 | Water sample data | 2020-02-06 11:12:04 | 24.5 N, 55.9501 W | RRS James Cook JC191 |
| 2024741 | CTD or STD cast | 2020-02-06 19:49:38 | 24.5001 N, 55.2007 W | RRS James Cook JC191 |
| 2290820 | Water sample data | 2020-02-06 19:49:38 | 24.5001 N, 55.2007 W | RRS James Cook JC191 |
| 2024753 | CTD or STD cast | 2020-02-07 04:42:52 | 24.5001 N, 54.473 W | RRS James Cook JC191 |
| 2204220 | Currents -subsurface Eulerian | 2020-02-07 04:42:52 | 24.50012 N, 54.47298 W | RRS James Cook JC191 |
| 2290832 | Water sample data | 2020-02-07 04:42:52 | 24.5001 N, 54.473 W | RRS James Cook JC191 |
| 2024765 | CTD or STD cast | 2020-02-07 13:17:06 | 24.5 N, 53.7335 W | RRS James Cook JC191 |
| 2204232 | Currents -subsurface Eulerian | 2020-02-07 13:17:06 | 24.50004 N, 53.73355 W | RRS James Cook JC191 |
| 2290844 | Water sample data | 2020-02-07 13:17:06 | 24.5 N, 53.7335 W | RRS James Cook JC191 |
| 2024777 | CTD or STD cast | 2020-02-08 05:02:07 | 24.8391 N, 53.1018 W | RRS James Cook JC191 |
| 2204244 | Currents -subsurface Eulerian | 2020-02-08 05:02:07 | 24.83909 N, 53.10176 W | RRS James Cook JC191 |
| 2290856 | Water sample data | 2020-02-08 05:02:07 | 24.8391 N, 53.1018 W | RRS James Cook JC191 |
| 2024789 | CTD or STD cast | 2020-02-08 13:04:53 | 25.1103 N, 52.668 W | RRS James Cook JC191 |
| 2204256 | Currents -subsurface Eulerian | 2020-02-08 13:04:53 | 25.1103 N, 52.66804 W | RRS James Cook JC191 |
| 2290868 | Water sample data | 2020-02-08 13:04:53 | 25.1103 N, 52.668 W | RRS James Cook JC191 |
| 2024790 | CTD or STD cast | 2020-02-08 21:05:27 | 25.1251 N, 52.1676 W | RRS James Cook JC191 |
| 2204268 | Currents -subsurface Eulerian | 2020-02-08 21:05:27 | 25.12514 N, 52.16757 W | RRS James Cook JC191 |
| 2290881 | Water sample data | 2020-02-08 21:05:27 | 25.1251 N, 52.1676 W | RRS James Cook JC191 |
| 2024808 | CTD or STD cast | 2020-02-09 05:18:26 | 25.022 N, 51.667 W | RRS James Cook JC191 |
| 2204281 | Currents -subsurface Eulerian | 2020-02-09 05:18:26 | 25.02195 N, 51.66697 W | RRS James Cook JC191 |
| 2290893 | Water sample data | 2020-02-09 05:18:26 | 25.022 N, 51.667 W | RRS James Cook JC191 |
| 2024821 | CTD or STD cast | 2020-02-09 12:51:25 | 24.9374 N, 51.1672 W | RRS James Cook JC191 |
| 2204293 | Currents -subsurface Eulerian | 2020-02-09 12:51:25 | 24.93734 N, 51.1672 W | RRS James Cook JC191 |
| 2290900 | Water sample data | 2020-02-09 12:51:25 | 24.9374 N, 51.1672 W | RRS James Cook JC191 |
| 2024833 | CTD or STD cast | 2020-02-09 21:04:40 | 24.7985 N, 50.6323 W | RRS James Cook JC191 |
| 2204300 | Currents -subsurface Eulerian | 2020-02-09 21:04:40 | 24.79846 N, 50.63224 W | RRS James Cook JC191 |
| 2290912 | Water sample data | 2020-02-09 21:04:40 | 24.7985 N, 50.6323 W | RRS James Cook JC191 |
| 2024845 | CTD or STD cast | 2020-02-10 04:47:05 | 24.669 N, 50.0904 W | RRS James Cook JC191 |
| 2204312 | Currents -subsurface Eulerian | 2020-02-10 04:47:05 | 24.66904 N, 50.09041 W | RRS James Cook JC191 |
| 2290924 | Water sample data | 2020-02-10 04:47:05 | 24.669 N, 50.0904 W | RRS James Cook JC191 |
| 2024857 | CTD or STD cast | 2020-02-10 12:29:31 | 24.5208 N, 49.5344 W | RRS James Cook JC191 |
| 2204324 | Currents -subsurface Eulerian | 2020-02-10 12:29:31 | 24.52084 N, 49.53437 W | RRS James Cook JC191 |
| 2290936 | Water sample data | 2020-02-10 12:29:31 | 24.5208 N, 49.5344 W | RRS James Cook JC191 |
| 2024869 | CTD or STD cast | 2020-02-10 20:32:43 | 24.3492 N, 49.0089 W | RRS James Cook JC191 |
| 2204336 | Currents -subsurface Eulerian | 2020-02-10 20:32:43 | 24.34913 N, 49.0089 W | RRS James Cook JC191 |
| 2290948 | Water sample data | 2020-02-10 20:32:43 | 24.3492 N, 49.0089 W | RRS James Cook JC191 |
| 2024870 | CTD or STD cast | 2020-02-11 04:09:03 | 24.1968 N, 48.4729 W | RRS James Cook JC191 |
| 2204348 | Currents -subsurface Eulerian | 2020-02-11 04:09:03 | 24.19674 N, 48.47288 W | RRS James Cook JC191 |
| 2290961 | Water sample data | 2020-02-11 04:09:03 | 24.1968 N, 48.4729 W | RRS James Cook JC191 |
| 2024882 | CTD or STD cast | 2020-02-11 11:36:15 | 24.0662 N, 47.9429 W | RRS James Cook JC191 |
| 2204361 | Currents -subsurface Eulerian | 2020-02-11 11:36:15 | 24.06625 N, 47.9429 W | RRS James Cook JC191 |
| 2290973 | Water sample data | 2020-02-11 11:36:15 | 24.0662 N, 47.9429 W | RRS James Cook JC191 |
| 2024894 | CTD or STD cast | 2020-02-11 18:38:29 | 23.9753 N, 47.4089 W | RRS James Cook JC191 |
| 2204373 | Currents -subsurface Eulerian | 2020-02-11 18:38:29 | 23.97524 N, 47.40885 W | RRS James Cook JC191 |
| 2290985 | Water sample data | 2020-02-11 18:38:29 | 23.9753 N, 47.4089 W | RRS James Cook JC191 |
| 2024901 | CTD or STD cast | 2020-02-12 01:39:02 | 23.8994 N, 46.8758 W | RRS James Cook JC191 |
| 2204385 | Currents -subsurface Eulerian | 2020-02-12 01:39:02 | 23.89938 N, 46.87576 W | RRS James Cook JC191 |
| 2290997 | Water sample data | 2020-02-12 01:39:02 | 23.8994 N, 46.8758 W | RRS James Cook JC191 |
| 2024913 | CTD or STD cast | 2020-02-12 08:43:41 | 23.8739 N, 46.3346 W | RRS James Cook JC191 |
| 2204397 | Currents -subsurface Eulerian | 2020-02-12 08:43:41 | 23.87387 N, 46.33456 W | RRS James Cook JC191 |
| 2291000 | Water sample data | 2020-02-12 08:43:41 | 23.8739 N, 46.3346 W | RRS James Cook JC191 |
| 2024925 | CTD or STD cast | 2020-02-12 15:43:00 | 23.7676 N, 45.8023 W | RRS James Cook JC191 |
| 2204404 | Currents -subsurface Eulerian | 2020-02-12 15:43:00 | 23.76762 N, 45.80232 W | RRS James Cook JC191 |
| 2291012 | Water sample data | 2020-02-12 15:43:00 | 23.7676 N, 45.8023 W | RRS James Cook JC191 |
| 2024937 | CTD or STD cast | 2020-02-12 22:28:34 | 23.7324 N, 45.2687 W | RRS James Cook JC191 |
| 2204416 | Currents -subsurface Eulerian | 2020-02-12 22:28:34 | 23.73243 N, 45.26874 W | RRS James Cook JC191 |
| 2291024 | Water sample data | 2020-02-12 22:28:34 | 23.7324 N, 45.2687 W | RRS James Cook JC191 |
| 2024949 | CTD or STD cast | 2020-02-13 05:27:33 | 23.6356 N, 44.7355 W | RRS James Cook JC191 |
| 2204428 | Currents -subsurface Eulerian | 2020-02-13 05:27:33 | 23.6356 N, 44.73546 W | RRS James Cook JC191 |
| 2291036 | Water sample data | 2020-02-13 05:27:33 | 23.6356 N, 44.7355 W | RRS James Cook JC191 |
| 2024950 | CTD or STD cast | 2020-02-13 12:14:25 | 23.535 N, 44.2086 W | RRS James Cook JC191 |
| 2204441 | Currents -subsurface Eulerian | 2020-02-13 12:14:25 | 23.53502 N, 44.2086 W | RRS James Cook JC191 |
| 2291048 | Water sample data | 2020-02-13 12:14:25 | 23.535 N, 44.2086 W | RRS James Cook JC191 |
| 2024962 | CTD or STD cast | 2020-02-13 19:18:33 | 23.45 N, 43.6724 W | RRS James Cook JC191 |
| 2204453 | Currents -subsurface Eulerian | 2020-02-13 19:18:33 | 23.44995 N, 43.67238 W | RRS James Cook JC191 |
| 2291061 | Water sample data | 2020-02-13 19:18:33 | 23.45 N, 43.6724 W | RRS James Cook JC191 |
| 2024974 | CTD or STD cast | 2020-02-14 02:29:04 | 23.3731 N, 43.1416 W | RRS James Cook JC191 |
| 2204465 | Currents -subsurface Eulerian | 2020-02-14 02:29:04 | 23.37314 N, 43.14158 W | RRS James Cook JC191 |
| 2291073 | Water sample data | 2020-02-14 02:29:04 | 23.3731 N, 43.1416 W | RRS James Cook JC191 |
| 2024986 | CTD or STD cast | 2020-02-14 09:43:40 | 23.2504 N, 42.6006 W | RRS James Cook JC191 |
| 2204477 | Currents -subsurface Eulerian | 2020-02-14 09:43:40 | 23.25036 N, 42.60058 W | RRS James Cook JC191 |
| 2291085 | Water sample data | 2020-02-14 09:43:40 | 23.2504 N, 42.6006 W | RRS James Cook JC191 |
| 2024998 | CTD or STD cast | 2020-02-14 17:52:03 | 23.3336 N, 41.8837 W | RRS James Cook JC191 |
| 2204489 | Currents -subsurface Eulerian | 2020-02-14 17:52:03 | 23.33359 N, 41.88368 W | RRS James Cook JC191 |
| 2291097 | Water sample data | 2020-02-14 17:52:03 | 23.3336 N, 41.8837 W | RRS James Cook JC191 |
| 2025001 | CTD or STD cast | 2020-02-14 23:32:42 | 23.4002 N, 41.467 W | RRS James Cook JC191 |
| 2204490 | Currents -subsurface Eulerian | 2020-02-14 23:32:42 | 23.40022 N, 41.46702 W | RRS James Cook JC191 |
| 2025013 | CTD or STD cast | 2020-02-15 04:44:48 | 23.4499 N, 41.0501 W | RRS James Cook JC191 |
| 2204508 | Currents -subsurface Eulerian | 2020-02-15 04:44:48 | 23.44993 N, 41.05008 W | RRS James Cook JC191 |
| 2291104 | Water sample data | 2020-02-15 04:44:48 | 23.4499 N, 41.0501 W | RRS James Cook JC191 |
| 2025025 | CTD or STD cast | 2020-02-15 12:58:41 | 23.5796 N, 40.3333 W | RRS James Cook JC191 |
| 2204521 | Currents -subsurface Eulerian | 2020-02-15 12:58:41 | 23.57964 N, 40.3333 W | RRS James Cook JC191 |
| 2291116 | Water sample data | 2020-02-15 12:58:41 | 23.5796 N, 40.3333 W | RRS James Cook JC191 |
| 2025037 | CTD or STD cast | 2020-02-15 21:19:54 | 23.7096 N, 39.6166 W | RRS James Cook JC191 |
| 2204533 | Currents -subsurface Eulerian | 2020-02-15 21:19:54 | 23.70954 N, 39.6166 W | RRS James Cook JC191 |
| 2291128 | Water sample data | 2020-02-15 21:19:54 | 23.7096 N, 39.6166 W | RRS James Cook JC191 |
| 2025049 | CTD or STD cast | 2020-02-16 05:37:59 | 23.839 N, 38.9001 W | RRS James Cook JC191 |
| 2204545 | Currents -subsurface Eulerian | 2020-02-16 05:37:59 | 23.83905 N, 38.90008 W | RRS James Cook JC191 |
| 2291141 | Water sample data | 2020-02-16 05:37:59 | 23.839 N, 38.9001 W | RRS James Cook JC191 |
| 2025050 | CTD or STD cast | 2020-02-16 14:03:56 | 23.9691 N, 38.1825 W | RRS James Cook JC191 |
| 2204557 | Currents -subsurface Eulerian | 2020-02-16 14:03:56 | 23.96907 N, 38.18249 W | RRS James Cook JC191 |
| 2291153 | Water sample data | 2020-02-16 14:03:56 | 23.9691 N, 38.1825 W | RRS James Cook JC191 |
| 2025062 | CTD or STD cast | 2020-02-16 22:39:30 | 24.1008 N, 37.4739 W | RRS James Cook JC191 |
| 2204569 | Currents -subsurface Eulerian | 2020-02-16 22:39:30 | 24.10099 N, 37.47323 W | RRS James Cook JC191 |
| 2291165 | Water sample data | 2020-02-16 22:39:30 | 24.1008 N, 37.4739 W | RRS James Cook JC191 |
| 2025074 | CTD or STD cast | 2020-02-17 07:15:13 | 24.2284 N, 36.7507 W | RRS James Cook JC191 |
| 2204570 | Currents -subsurface Eulerian | 2020-02-17 07:15:13 | 24.22838 N, 36.75068 W | RRS James Cook JC191 |
| 2291177 | Water sample data | 2020-02-17 07:15:13 | 24.2284 N, 36.7507 W | RRS James Cook JC191 |
| 2025086 | CTD or STD cast | 2020-02-17 15:38:45 | 24.3584 N, 36.0334 W | RRS James Cook JC191 |
| 2204582 | Currents -subsurface Eulerian | 2020-02-17 15:38:45 | 24.3584 N, 36.03344 W | RRS James Cook JC191 |
| 2291189 | Water sample data | 2020-02-17 15:38:45 | 24.3584 N, 36.0334 W | RRS James Cook JC191 |
| 2025098 | CTD or STD cast | 2020-02-18 00:02:12 | 24.4889 N, 35.3154 W | RRS James Cook JC191 |
| 2204594 | Currents -subsurface Eulerian | 2020-02-18 00:02:12 | 24.48888 N, 35.31544 W | RRS James Cook JC191 |
| 2291190 | Water sample data | 2020-02-18 00:02:12 | 24.4889 N, 35.3154 W | RRS James Cook JC191 |
| 2025105 | CTD or STD cast | 2020-02-18 08:10:24 | 24.4999 N, 34.6006 W | RRS James Cook JC191 |
| 2204601 | Currents -subsurface Eulerian | 2020-02-18 08:10:24 | 24.49993 N, 34.60058 W | RRS James Cook JC191 |
| 2291208 | Water sample data | 2020-02-18 08:10:24 | 24.4999 N, 34.6006 W | RRS James Cook JC191 |
| 2025117 | CTD or STD cast | 2020-02-18 16:55:51 | 24.4998 N, 33.9021 W | RRS James Cook JC191 |
| 2204613 | Currents -subsurface Eulerian | 2020-02-18 16:55:51 | 24.49977 N, 33.90207 W | RRS James Cook JC191 |
| 2291221 | Water sample data | 2020-02-18 16:55:51 | 24.4998 N, 33.9021 W | RRS James Cook JC191 |
| 2025129 | CTD or STD cast | 2020-02-19 01:54:28 | 24.5 N, 33.2 W | RRS James Cook JC191 |
| 2204625 | Currents -subsurface Eulerian | 2020-02-19 01:54:28 | 24.5 N, 33.20005 W | RRS James Cook JC191 |
| 2291233 | Water sample data | 2020-02-19 01:54:28 | 24.5 N, 33.2 W | RRS James Cook JC191 |
| 2025130 | CTD or STD cast | 2020-02-19 10:45:51 | 24.4997 N, 32.5002 W | RRS James Cook JC191 |
| 2204637 | Currents -subsurface Eulerian | 2020-02-19 10:45:51 | 24.4997 N, 32.50024 W | RRS James Cook JC191 |
| 2291245 | Water sample data | 2020-02-19 10:45:51 | 24.4997 N, 32.5002 W | RRS James Cook JC191 |
| 2025142 | CTD or STD cast | 2020-02-19 19:36:45 | 24.4999 N, 31.8 W | RRS James Cook JC191 |
| 2204649 | Currents -subsurface Eulerian | 2020-02-19 19:36:45 | 24.49994 N, 31.80004 W | RRS James Cook JC191 |
| 2291257 | Water sample data | 2020-02-19 19:36:45 | 24.4999 N, 31.8 W | RRS James Cook JC191 |
| 2025154 | CTD or STD cast | 2020-02-20 04:28:29 | 24.5 N, 31.1022 W | RRS James Cook JC191 |
| 2204650 | Currents -subsurface Eulerian | 2020-02-20 04:28:29 | 24.5 N, 31.10224 W | RRS James Cook JC191 |
| 2291269 | Water sample data | 2020-02-20 04:28:29 | 24.5 N, 31.1022 W | RRS James Cook JC191 |
| 2025166 | CTD or STD cast | 2020-02-20 13:33:17 | 24.5006 N, 30.3999 W | RRS James Cook JC191 |
| 2204662 | Currents -subsurface Eulerian | 2020-02-20 13:33:17 | 24.50059 N, 30.3999 W | RRS James Cook JC191 |
| 2291270 | Water sample data | 2020-02-20 13:33:17 | 24.5006 N, 30.3999 W | RRS James Cook JC191 |
| 2025178 | CTD or STD cast | 2020-02-20 22:16:29 | 24.5 N, 29.7003 W | RRS James Cook JC191 |
| 2204674 | Currents -subsurface Eulerian | 2020-02-20 22:16:29 | 24.50005 N, 29.70032 W | RRS James Cook JC191 |
| 2291282 | Water sample data | 2020-02-20 22:16:29 | 24.5 N, 29.7003 W | RRS James Cook JC191 |
| 2025191 | CTD or STD cast | 2020-02-21 08:42:59 | 24.499 N, 28.7181 W | RRS James Cook JC191 |
| 2204686 | Currents -subsurface Eulerian | 2020-02-21 08:42:59 | 24.49898 N, 28.71812 W | RRS James Cook JC191 |
| 2291294 | Water sample data | 2020-02-21 08:42:59 | 24.499 N, 28.7181 W | RRS James Cook JC191 |
| 2025209 | CTD or STD cast | 2020-02-21 19:08:53 | 24.4998 N, 27.7333 W | RRS James Cook JC191 |
| 2204698 | Currents -subsurface Eulerian | 2020-02-21 19:08:53 | 24.49983 N, 27.73331 W | RRS James Cook JC191 |
| 2291301 | Water sample data | 2020-02-21 19:08:53 | 24.4998 N, 27.7333 W | RRS James Cook JC191 |
| 2025210 | CTD or STD cast | 2020-02-22 05:43:45 | 24.4996 N, 26.7505 W | RRS James Cook JC191 |
| 2204705 | Currents -subsurface Eulerian | 2020-02-22 05:43:45 | 24.49963 N, 26.75052 W | RRS James Cook JC191 |
| 2291313 | Water sample data | 2020-02-22 05:43:45 | 24.4996 N, 26.7505 W | RRS James Cook JC191 |
| 2025222 | CTD or STD cast | 2020-02-22 15:45:32 | 24.4997 N, 25.7666 W | RRS James Cook JC191 |
| 2204717 | Currents -subsurface Eulerian | 2020-02-22 15:45:32 | 24.49974 N, 25.76663 W | RRS James Cook JC191 |
| 2291325 | Water sample data | 2020-02-22 15:45:32 | 24.4997 N, 25.7666 W | RRS James Cook JC191 |
| 2025234 | CTD or STD cast | 2020-02-23 01:06:40 | 24.4999 N, 24.783 W | RRS James Cook JC191 |
| 2204729 | Currents -subsurface Eulerian | 2020-02-23 01:06:40 | 24.49996 N, 24.78297 W | RRS James Cook JC191 |
| 2291337 | Water sample data | 2020-02-23 01:06:40 | 24.4999 N, 24.783 W | RRS James Cook JC191 |
| 2025246 | CTD or STD cast | 2020-02-23 10:13:18 | 24.4997 N, 23.8 W | RRS James Cook JC191 |
| 2204730 | Currents -subsurface Eulerian | 2020-02-23 10:13:18 | 24.49973 N, 23.80002 W | RRS James Cook JC191 |
| 2291349 | Water sample data | 2020-02-23 10:13:18 | 24.4997 N, 23.8 W | RRS James Cook JC191 |
| 2025258 | CTD or STD cast | 2020-02-23 18:55:44 | 24.7335 N, 22.8159 W | RRS James Cook JC191 |
| 2204742 | Currents -subsurface Eulerian | 2020-02-23 18:55:44 | 24.7332 N, 22.81607 W | RRS James Cook JC191 |
| 2291350 | Water sample data | 2020-02-23 18:55:44 | 24.7335 N, 22.8159 W | RRS James Cook JC191 |
| 2025271 | CTD or STD cast | 2020-02-24 02:33:58 | 24.9813 N, 22.1516 W | RRS James Cook JC191 |
| 2204754 | Currents -subsurface Eulerian | 2020-02-24 02:33:58 | 24.9813 N, 22.15156 W | RRS James Cook JC191 |
| 2291362 | Water sample data | 2020-02-24 02:33:58 | 24.9813 N, 22.1516 W | RRS James Cook JC191 |
| 2025283 | CTD or STD cast | 2020-02-24 10:25:34 | 25.2161 N, 21.4847 W | RRS James Cook JC191 |
| 2204766 | Currents -subsurface Eulerian | 2020-02-24 10:25:34 | 25.21614 N, 21.48467 W | RRS James Cook JC191 |
| 2291374 | Water sample data | 2020-02-24 10:25:34 | 25.2161 N, 21.4847 W | RRS James Cook JC191 |
| 2025295 | CTD or STD cast | 2020-02-24 18:05:13 | 25.4502 N, 20.8001 W | RRS James Cook JC191 |
| 2204778 | Currents -subsurface Eulerian | 2020-02-24 18:05:13 | 25.45015 N, 20.80008 W | RRS James Cook JC191 |
| 2291386 | Water sample data | 2020-02-24 18:05:13 | 25.4502 N, 20.8001 W | RRS James Cook JC191 |
| 2025302 | CTD or STD cast | 2020-02-25 01:09:24 | 25.65 N, 20.2501 W | RRS James Cook JC191 |
| 2204791 | Currents -subsurface Eulerian | 2020-02-25 01:09:24 | 25.65002 N, 20.25008 W | RRS James Cook JC191 |
| 2291398 | Water sample data | 2020-02-25 01:09:24 | 25.65 N, 20.2501 W | RRS James Cook JC191 |
| 2025314 | CTD or STD cast | 2020-02-25 09:00:10 | 25.9166 N, 19.484 W | RRS James Cook JC191 |
| 2204809 | Currents -subsurface Eulerian | 2020-02-25 09:00:10 | 25.91656 N, 19.48406 W | RRS James Cook JC191 |
| 2291405 | Water sample data | 2020-02-25 09:00:10 | 25.9166 N, 19.484 W | RRS James Cook JC191 |
| 2025326 | CTD or STD cast | 2020-02-25 15:29:34 | 26.1334 N, 18.9167 W | RRS James Cook JC191 |
| 2204810 | Currents -subsurface Eulerian | 2020-02-25 15:29:34 | 26.13335 N, 18.9167 W | RRS James Cook JC191 |
| 2291417 | Water sample data | 2020-02-25 15:29:34 | 26.1334 N, 18.9167 W | RRS James Cook JC191 |
| 2025338 | CTD or STD cast | 2020-02-25 23:05:48 | 26.3835 N, 18.166 W | RRS James Cook JC191 |
| 2204822 | Currents -subsurface Eulerian | 2020-02-25 23:05:48 | 26.38352 N, 18.16598 W | RRS James Cook JC191 |
| 2291429 | Water sample data | 2020-02-25 23:05:48 | 26.3835 N, 18.166 W | RRS James Cook JC191 |
| 2025351 | CTD or STD cast | 2020-02-26 06:24:21 | 26.5997 N, 17.4671 W | RRS James Cook JC191 |
| 2204834 | Currents -subsurface Eulerian | 2020-02-26 06:24:21 | 26.59966 N, 17.46712 W | RRS James Cook JC191 |
| 2291430 | Water sample data | 2020-02-26 06:24:21 | 26.5997 N, 17.4671 W | RRS James Cook JC191 |
| 2025363 | CTD or STD cast | 2020-02-26 13:56:45 | 26.8185 N, 16.7849 W | RRS James Cook JC191 |
| 2204846 | Currents -subsurface Eulerian | 2020-02-26 13:56:45 | 26.81795 N, 16.78466 W | RRS James Cook JC191 |
| 2291442 | Water sample data | 2020-02-26 13:56:45 | 26.8185 N, 16.7849 W | RRS James Cook JC191 |
| 2025375 | CTD or STD cast | 2020-02-26 21:12:45 | 27.0495 N, 16.1174 W | RRS James Cook JC191 |
| 2204858 | Currents -subsurface Eulerian | 2020-02-26 21:12:45 | 27.04948 N, 16.1174 W | RRS James Cook JC191 |
| 2291454 | Water sample data | 2020-02-26 21:12:45 | 27.0495 N, 16.1174 W | RRS James Cook JC191 |
| 2025387 | CTD or STD cast | 2020-02-27 03:18:04 | 27.2329 N, 15.6002 W | RRS James Cook JC191 |
| 2204871 | Currents -subsurface Eulerian | 2020-02-27 03:18:04 | 27.23292 N, 15.60019 W | RRS James Cook JC191 |
| 2291466 | Water sample data | 2020-02-27 03:18:04 | 27.2329 N, 15.6002 W | RRS James Cook JC191 |
| 2025399 | CTD or STD cast | 2020-02-27 07:56:34 | 27.333 N, 15.2336 W | RRS James Cook JC191 |
| 2204883 | Currents -subsurface Eulerian | 2020-02-27 07:56:34 | 27.33305 N, 15.23364 W | RRS James Cook JC191 |
| 2025406 | CTD or STD cast | 2020-02-27 12:19:04 | 27.4336 N, 14.867 W | RRS James Cook JC191 |
| 2204895 | Currents -subsurface Eulerian | 2020-02-27 12:19:04 | 27.43362 N, 14.86702 W | RRS James Cook JC191 |
| 2291478 | Water sample data | 2020-02-27 12:19:04 | 27.4336 N, 14.867 W | RRS James Cook JC191 |
| 2025418 | CTD or STD cast | 2020-02-27 17:58:28 | 27.6168 N, 14.2335 W | RRS James Cook JC191 |
| 2204902 | Currents -subsurface Eulerian | 2020-02-27 17:58:28 | 27.61676 N, 14.23346 W | RRS James Cook JC191 |
| 2291491 | Water sample data | 2020-02-27 17:58:28 | 27.6168 N, 14.2335 W | RRS James Cook JC191 |
| 2025431 | CTD or STD cast | 2020-02-27 22:50:49 | 27.7833 N, 13.7667 W | RRS James Cook JC191 |
| 2204914 | Currents -subsurface Eulerian | 2020-02-27 22:50:49 | 27.78331 N, 13.76672 W | RRS James Cook JC191 |
| 2291509 | Water sample data | 2020-02-27 22:50:49 | 27.7833 N, 13.7667 W | RRS James Cook JC191 |
| 2025443 | CTD or STD cast | 2020-02-28 16:21:48 | 28.4309 N, 13.2276 W | RRS James Cook JC191 |
| 2204926 | Currents -subsurface Eulerian | 2020-02-28 16:21:48 | 28.43094 N, 13.22758 W | RRS James Cook JC191 |
| 2291510 | Water sample data | 2020-02-28 16:21:48 | 28.4309 N, 13.2276 W | RRS James Cook JC191 |
